 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Bias Correction for Improved Subseasonal Forecasting
Sep 21, 2022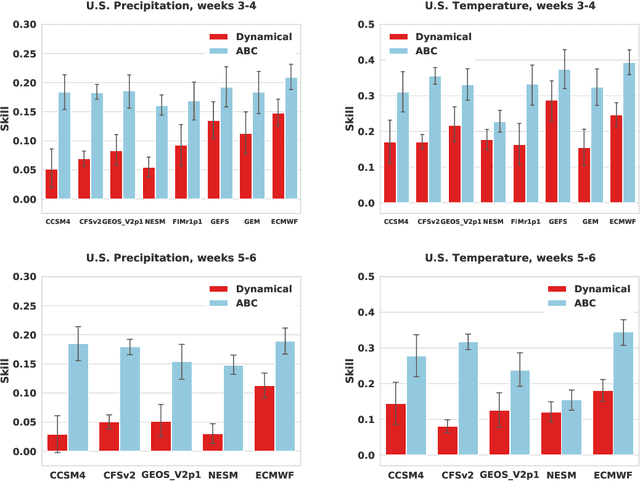
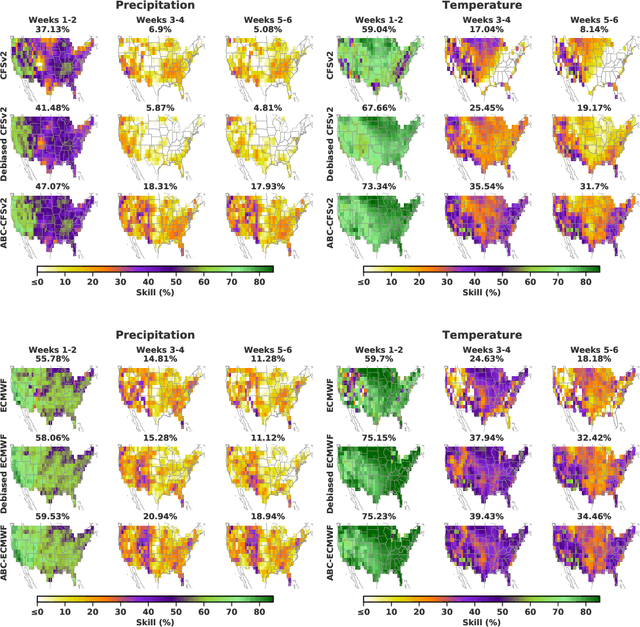
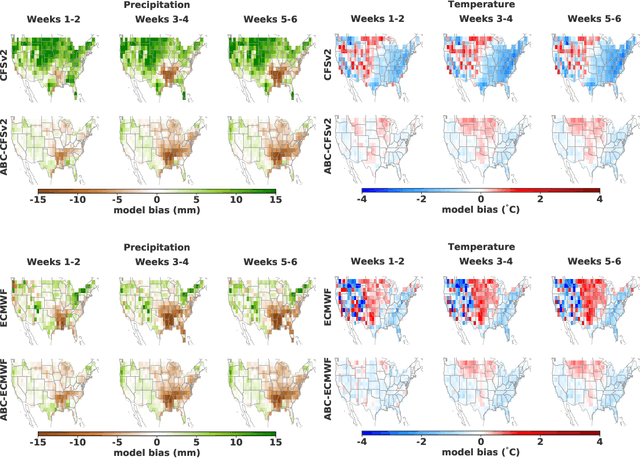
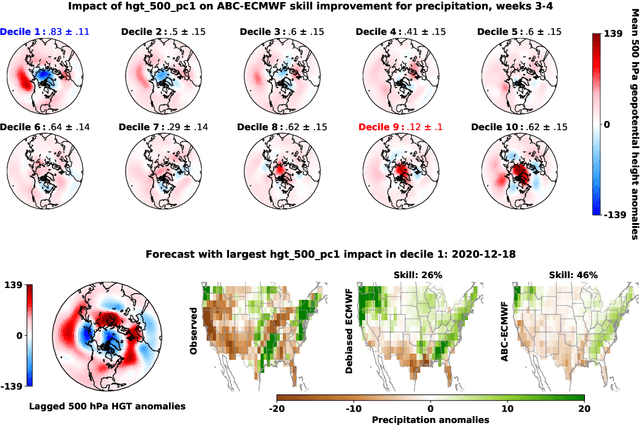
Subseasonal forecasting $\unicode{x2013}$ predicting temperature and precipitation 2 to 6 weeks $\unicode{x2013}$ ahead is critical for effective water allocation, wildfire management, and drought and flood mitigation. Recent international research efforts have advanced the subseasonal capabilities of operational dynamical models, yet temperature and precipitation prediction skills remains poor, partly due to stubborn errors in representing atmospheric dynamics and physics inside dynamical models. To counter these errors, we introduce an adaptive bias correction (ABC) method that combines state-of-the-art dynamical forecasts with observations using machine learning. When applied to the leading subseasonal model from the European Centre for Medium-Range Weather Forecasts (ECMWF), ABC improves temperature forecasting skill by 60-90% and precipitation forecasting skill by 40-69% in the contiguous U.S. We couple these performance improvements with a practical workflow, based on Cohort Shapley, for explaining ABC skill gains and identifying higher-skill windows of opportunity based on specific climate conditions.
Robotic Planning under Uncertainty in Spatiotemporal Environments in Expeditionary Science
Jun 03, 2022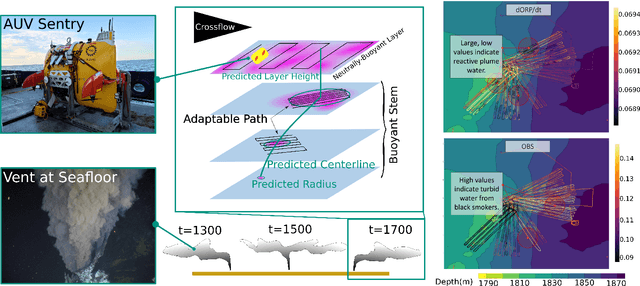
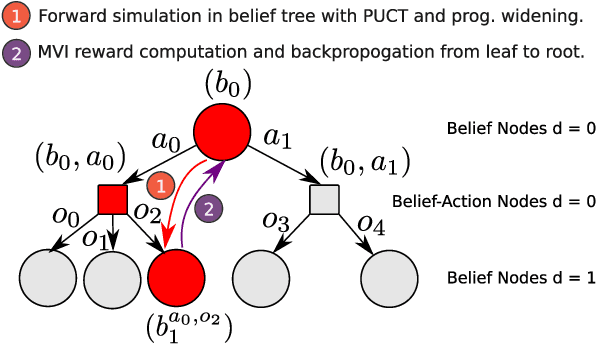
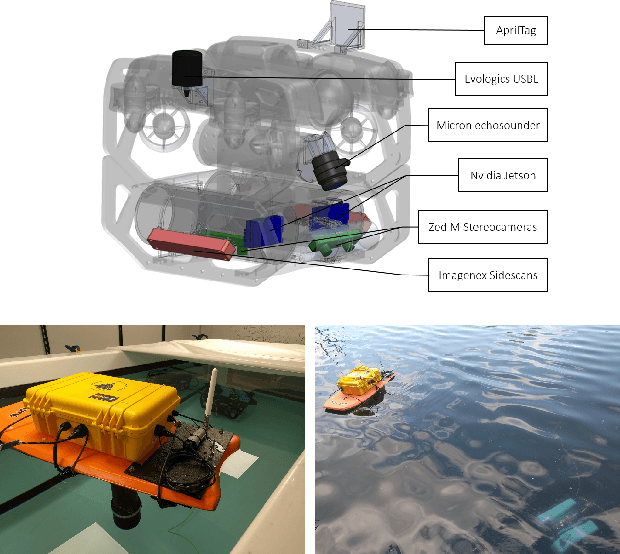
In the expeditionary sciences, spatiotemporally varying environments -- hydrothermal plumes, algal blooms, lava flows, or animal migrations -- are ubiquitous. Mobile robots are uniquely well-suited to study these dynamic, mesoscale natural environments. We formalize expeditionary science as a sequential decision-making problem, modeled using the language of partially-observable Markov decision processes (POMDPs). Solving the expeditionary science POMDP under real-world constraints requires efficient probabilistic modeling and decision-making in problems with complex dynamics and observational models. Previous work in informative path planning, adaptive sampling, and experimental design have shown compelling results, largely in static environments, using data-driven models and information-based rewards. However, these methodologies do not trivially extend to expeditionary science in spatiotemporal environments: they generally do not make use of scientific knowledge such as equations of state dynamics, they focus on information gathering as opposed to scientific task execution, and they make use of decision-making approaches that scale poorly to large, continuous problems with long planning horizons and real-time operational constraints. In this work, we discuss these and other challenges related to probabilistic modeling and decision-making in expeditionary science, and present some of our preliminary work that addresses these gaps. We ground our results in a real expeditionary science deployment of an autonomous underwater vehicle (AUV) in the deep ocean for hydrothermal vent discovery and characterization. Our concluding thoughts highlight remaining work to be done, and the challenges that merit consideration by the reinforcement learning and decision-making community.
Learned Benchmarks for Subseasonal Forecasting
Sep 21, 2021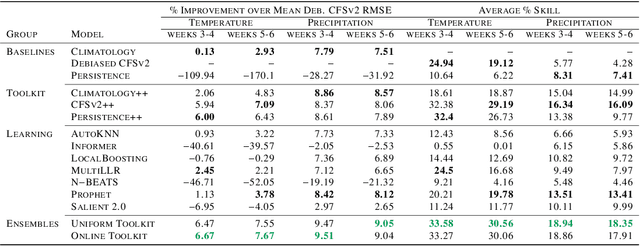
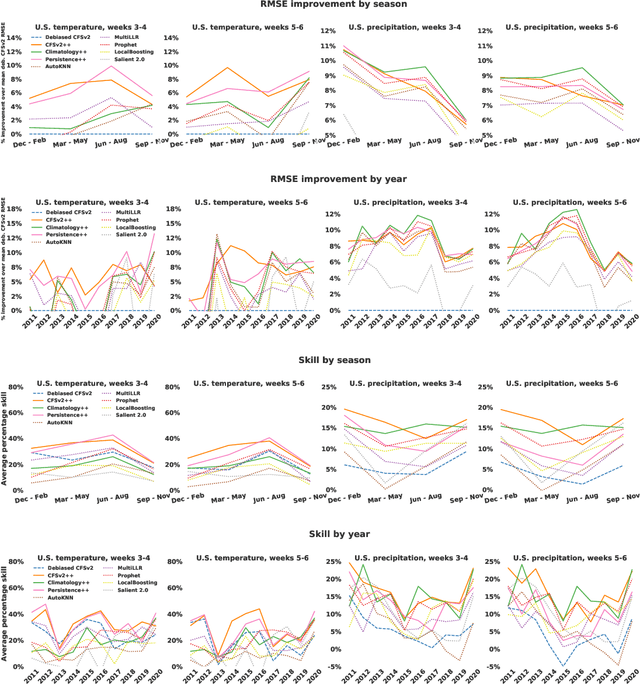
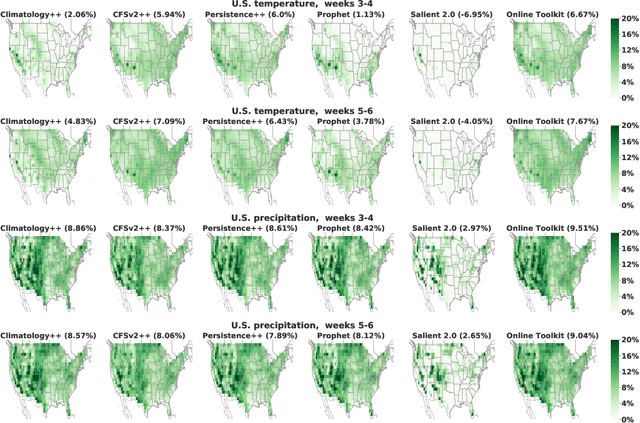
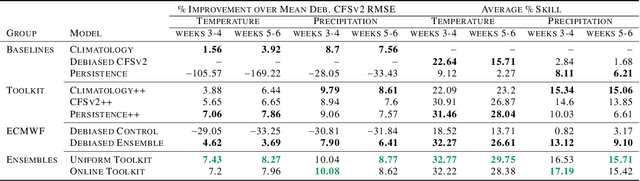
We develop a subseasonal forecasting toolkit of simple learned benchmark models that outperform both operational practice and state-of-the-art machine learning and deep learning methods. Our new models include (a) Climatology++, an adaptive alternative to climatology that, for precipitation, is 9% more accurate and 250% more skillful than the United States operational Climate Forecasting System (CFSv2); (b) CFSv2++, a learned CFSv2 correction that improves temperature and precipitation accuracy by 7-8% and skill by 50-275%; and (c) Persistence++, an augmented persistence model that combines CFSv2 forecasts with lagged measurements to improve temperature and precipitation accuracy by 6-9% and skill by 40-130%. Across the contiguous U.S., our Climatology++, CFSv2++, and Persistence++ toolkit consistently outperforms standard meteorological baselines, state-of-the-art machine and deep learning methods, and the European Centre for Medium-Range Weather Forecasts ensemble. Overall, we find that augmenting traditional forecasting approaches with learned enhancements yields an effective and computationally inexpensive strategy for building the next generation of subseasonal forecasting benchmarks.
Online Learning with Optimism and Delay
Jul 12, 2021
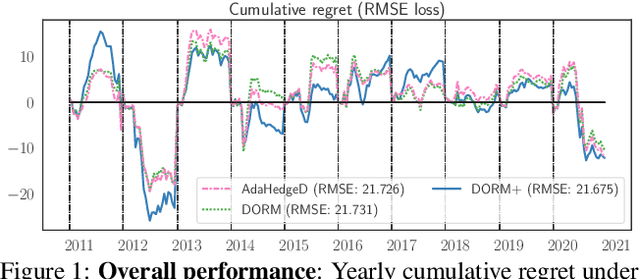
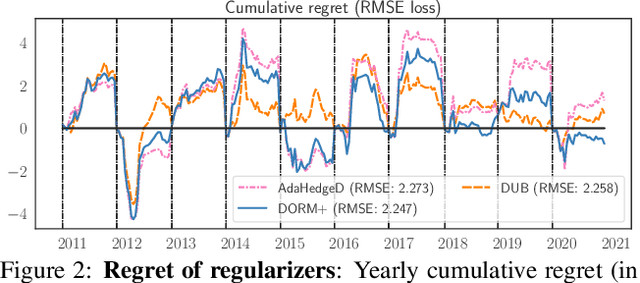

Inspired by the demands of real-time climate and weather forecasting, we develop optimistic online learning algorithms that require no parameter tuning and have optimal regret guarantees under delayed feedback. Our algorithms -- DORM, DORM+, and AdaHedgeD -- arise from a novel reduction of delayed online learning to optimistic online learning that reveals how optimistic hints can mitigate the regret penalty caused by delay. We pair this delay-as-optimism perspective with a new analysis of optimistic learning that exposes its robustness to hinting errors and a new meta-algorithm for learning effective hinting strategies in the presence of delay. We conclude by benchmarking our algorithms on four subseasonal climate forecasting tasks, demonstrating low regret relative to state-of-the-art forecasting models.
Information-Guided Robotic Maximum Seek-and-Sample in Partially Observable Continuous Environments
Sep 26, 2019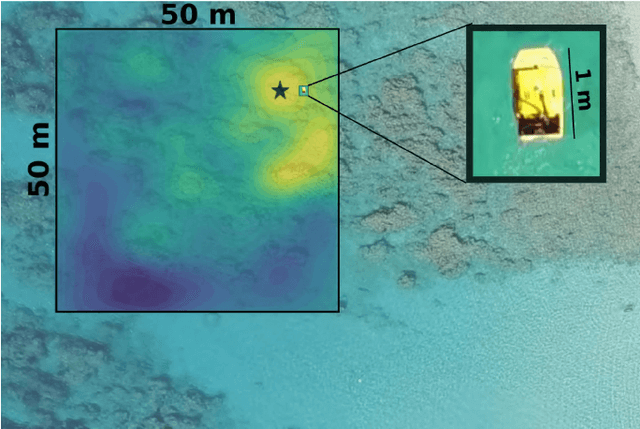
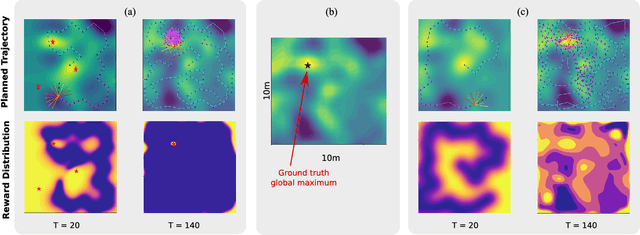
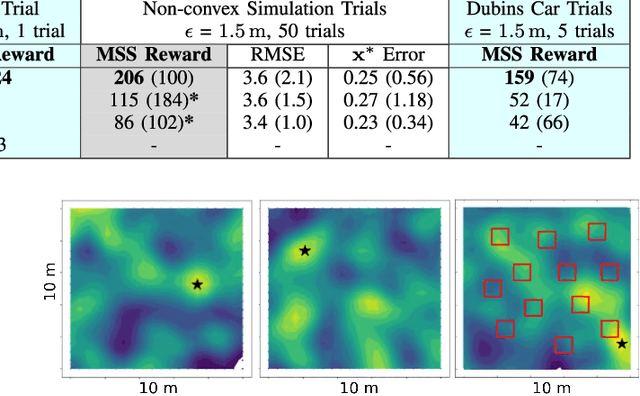
We present PLUMES, a planner to localizing and collecting samples at the global maximum of an a priori unknown and partially observable continuous environment. The "maximum-seek-and-sample" (MSS) problem is pervasive in the environmental and earth sciences. Experts want to collect scientifically valuable samples at an environmental maximum (e.g., an oil-spill source), but do not have prior knowledge about the phenomenon's distribution. We formulate the MSS problem as a partially-observable Markov decision process (POMDP) with continuous state and observation spaces, and a sparse reward signal. To solve the MSS POMDP, PLUMES uses an information-theoretic reward heuristic with continous-observation Monte Carlo Tree Search to efficiently localize and sample from the global maximum. In simulation and field experiments, PLUMES collects more scientifically valuable samples than state-of-the-art planners in a diverse set of environments, with various platforms, sensors, and challenging real-world conditions.
* 8 pages, 8 figures, To appear in the proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 Macau
Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments
Mar 07, 2019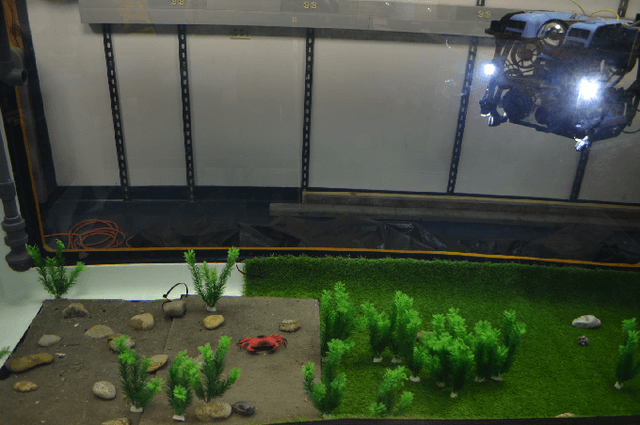
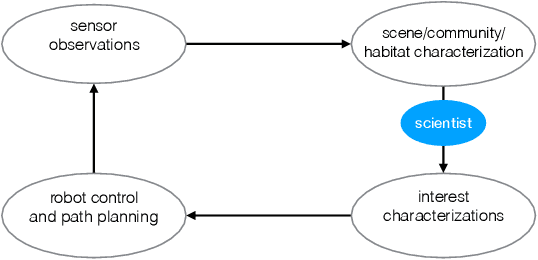
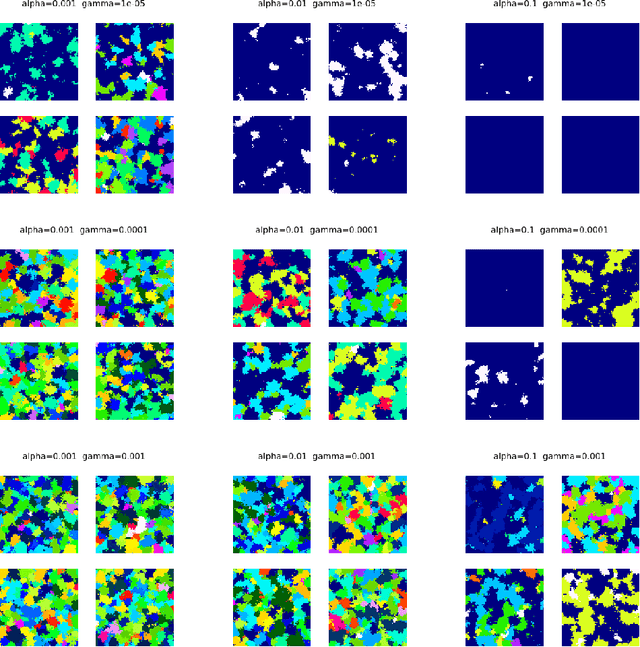
This paper proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters of the system enable the user to characterize the scene complexity represented by the map, which in turn determines the bandwidth requirements. The approach is demonstrated using an underwater robot that learns an unsupervised scene model of the environment and then uses this scene model to communicate the spatial distribution of various high-level semantic scene constructs to a human operator. Preliminary experiments in an artificially constructed tank environment as well as simulated missions over a 10m$\times$10m coral reef using real data show the tunability of the maps to different bandwidth constraints and science interests. To our knowledge this is the first paper to quantify how the free parameters of the unsupervised scene model impact both the scientific utility of and bandwidth required to communicate the resulting scene model.
Near-optimal irrevocable sample selection for periodic data streams with applications to marine robotics
Jan 21, 2018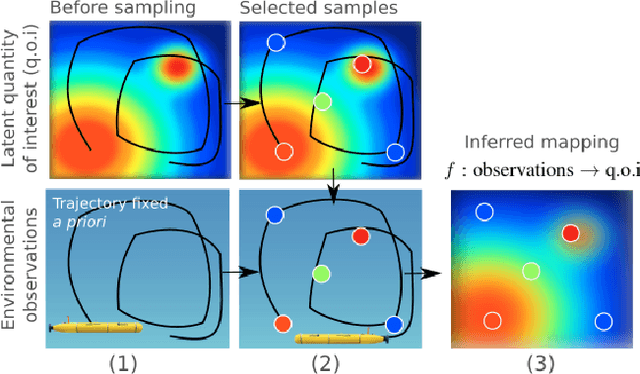
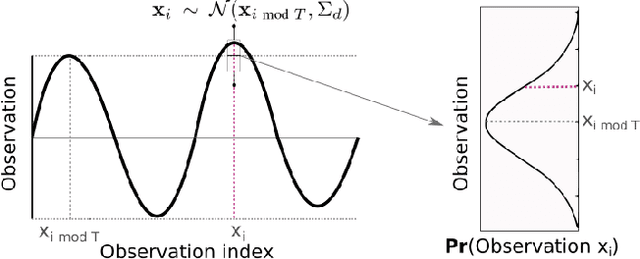
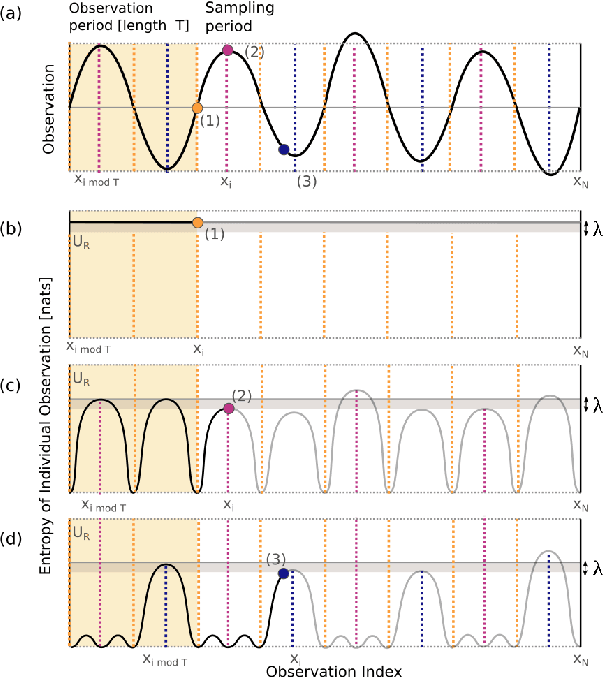
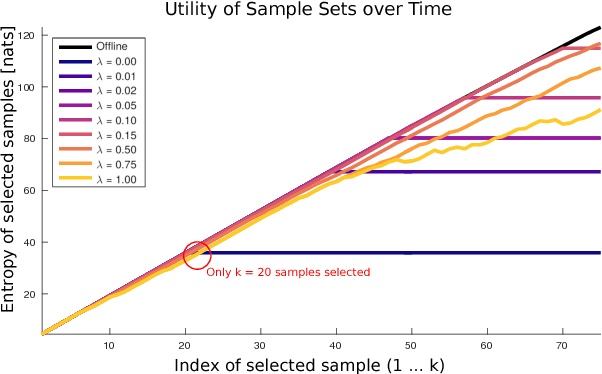
We consider the task of monitoring spatiotemporal phenomena in real-time by deploying limited sampling resources at locations of interest irrevocably and without knowledge of future observations. This task can be modeled as an instance of the classical secretary problem. Although this problem has been studied extensively in theoretical domains, existing algorithms require that data arrive in random order to provide performance guarantees. These algorithms will perform arbitrarily poorly on data streams such as those encountered in robotics and environmental monitoring domains, which tend to have spatiotemporal structure. We focus on the problem of selecting representative samples from phenomena with periodic structure and introduce a novel sample selection algorithm that recovers a near-optimal sample set according to any monotone submodular utility function. We evaluate our algorithm on a seven-year environmental dataset collected at the Martha's Vineyard Coastal Observatory and show that it selects phytoplankton sample locations that are nearly optimal in an information-theoretic sense for predicting phytoplankton concentrations in locations that were not directly sampled. The proposed periodic secretary algorithm can be used with theoretical performance guarantees in many real-time sensing and robotics applications for streaming, irrevocable sample selection from periodic data streams.
Feature discovery and visualization of robot mission data using convolutional autoencoders and Bayesian nonparametric topic models
Nov 30, 2017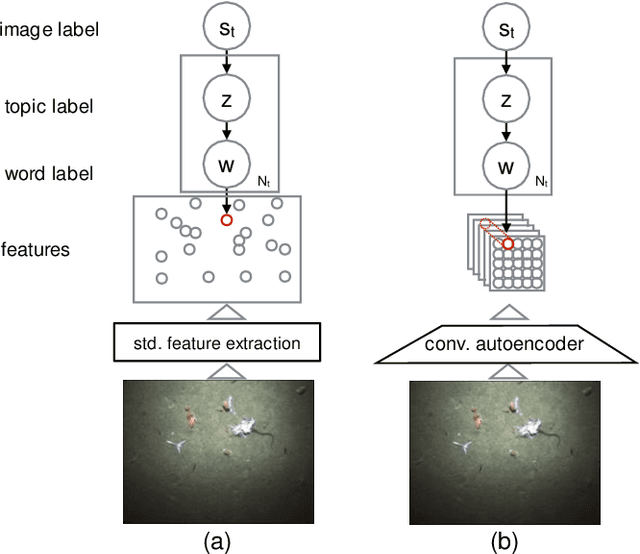
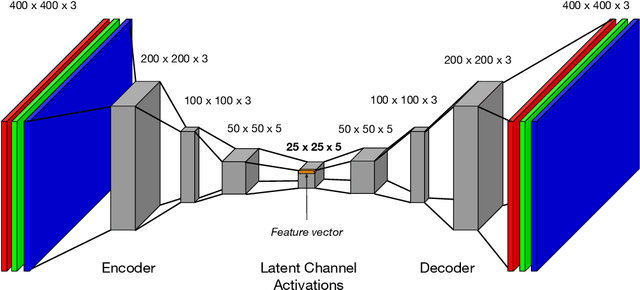
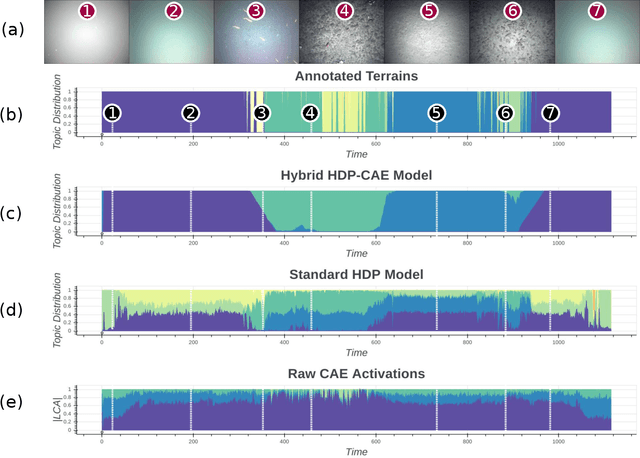
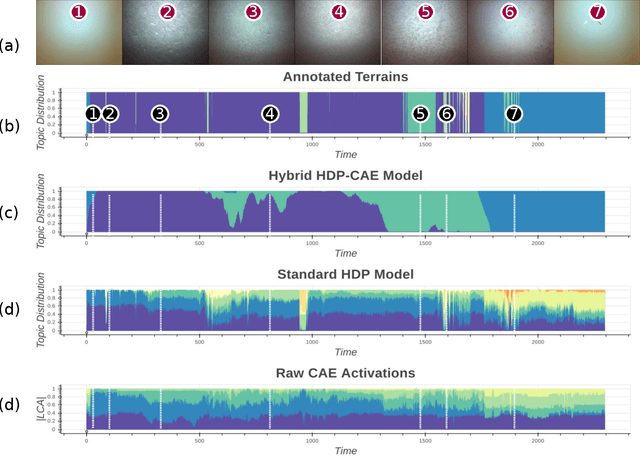
The gap between our ability to collect interesting data and our ability to analyze these data is growing at an unprecedented rate. Recent algorithmic attempts to fill this gap have employed unsupervised tools to discover structure in data. Some of the most successful approaches have used probabilistic models to uncover latent thematic structure in discrete data. Despite the success of these models on textual data, they have not generalized as well to image data, in part because of the spatial and temporal structure that may exist in an image stream. We introduce a novel unsupervised machine learning framework that incorporates the ability of convolutional autoencoders to discover features from images that directly encode spatial information, within a Bayesian nonparametric topic model that discovers meaningful latent patterns within discrete data. By using this hybrid framework, we overcome the fundamental dependency of traditional topic models on rigidly hand-coded data representations, while simultaneously encoding spatial dependency in our topics without adding model complexity. We apply this model to the motivating application of high-level scene understanding and mission summarization for exploratory marine robots. Our experiments on a seafloor dataset collected by a marine robot show that the proposed hybrid framework outperforms current state-of-the-art approaches on the task of unsupervised seafloor terrain characterization.