 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCUREE: A Curious Underwater Robot for Ecosystem Exploration
Mar 07, 2023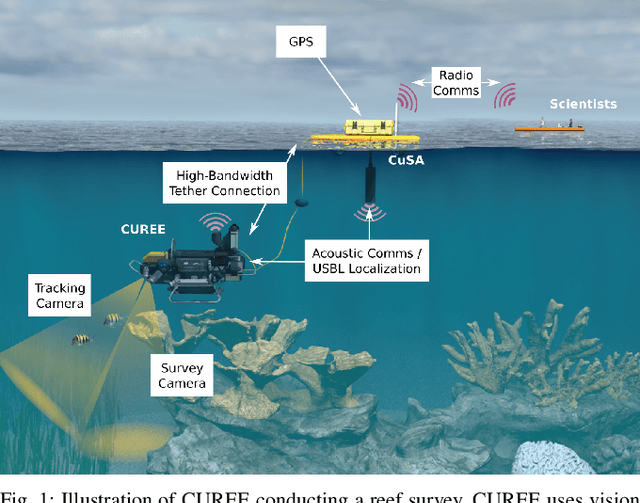
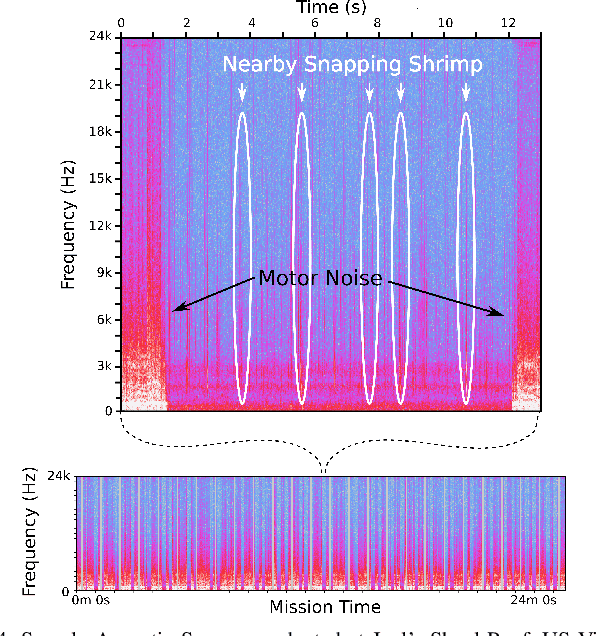
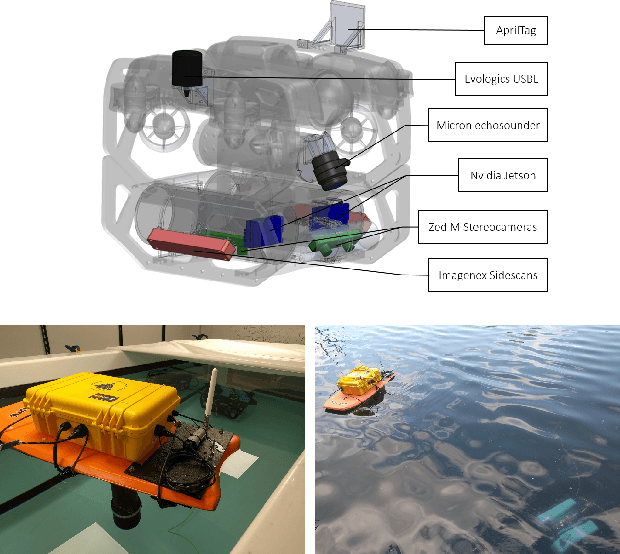
The current approach to exploring and monitoring complex underwater ecosystems, such as coral reefs, is to conduct surveys using diver-held or static cameras, or deploying sensor buoys. These approaches often fail to capture the full variation and complexity of interactions between different reef organisms and their habitat. The CUREE platform presented in this paper provides a unique set of capabilities in the form of robot behaviors and perception algorithms to enable scientists to explore different aspects of an ecosystem. Examples of these capabilities include low-altitude visual surveys, soundscape surveys, habitat characterization, and animal following. We demonstrate these capabilities by describing two field deployments on coral reefs in the US Virgin Islands. In the first deployment, we show that CUREE can identify the preferred habitat type of snapping shrimp in a reef through a combination of a visual survey, habitat characterization, and a soundscape survey. In the second deployment, we demonstrate CUREE's ability to follow arbitrary animals by separately following a barracuda and stingray for several minutes each in midwater and benthic environments, respectively.
* 7 pages
Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments
Mar 07, 2019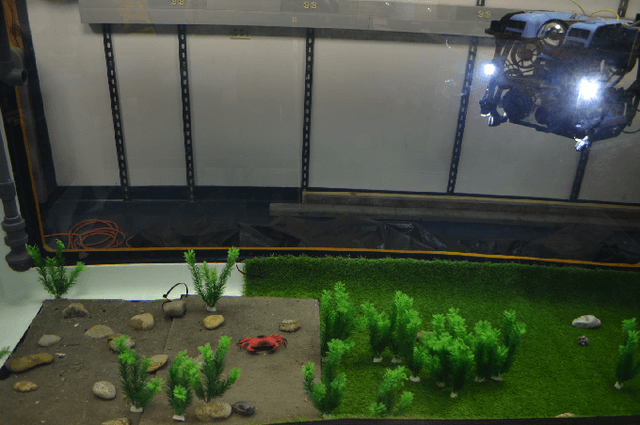
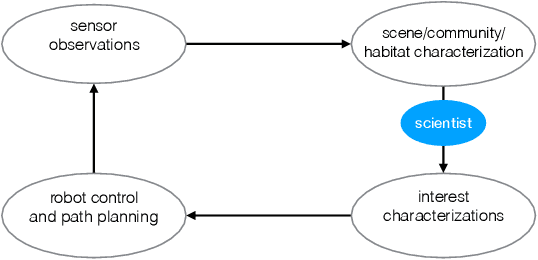
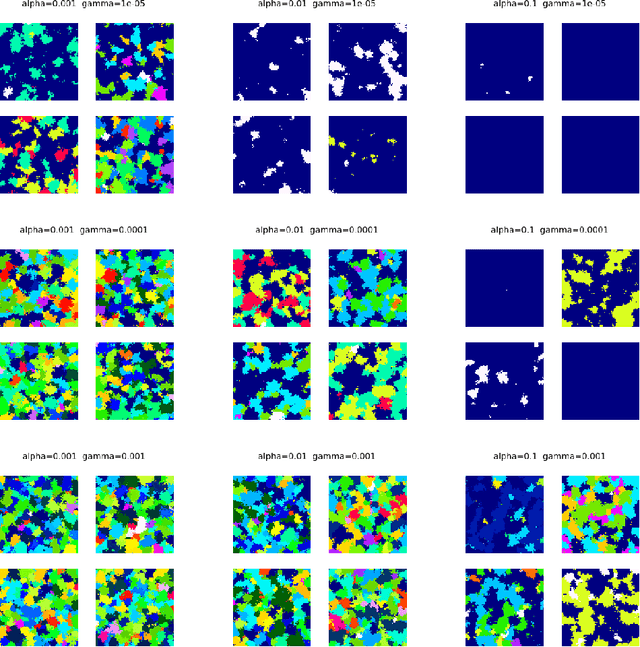
This paper proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters of the system enable the user to characterize the scene complexity represented by the map, which in turn determines the bandwidth requirements. The approach is demonstrated using an underwater robot that learns an unsupervised scene model of the environment and then uses this scene model to communicate the spatial distribution of various high-level semantic scene constructs to a human operator. Preliminary experiments in an artificially constructed tank environment as well as simulated missions over a 10m$\times$10m coral reef using real data show the tunability of the maps to different bandwidth constraints and science interests. To our knowledge this is the first paper to quantify how the free parameters of the unsupervised scene model impact both the scientific utility of and bandwidth required to communicate the resulting scene model.