 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring and Minimizing Disturbance of Marine Animals to Underwater Vehicles
Jun 12, 2025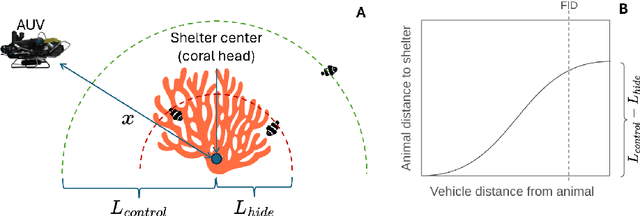
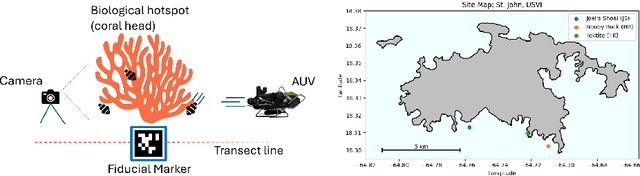
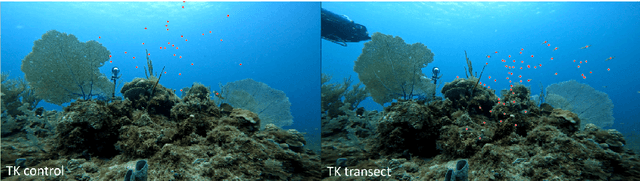
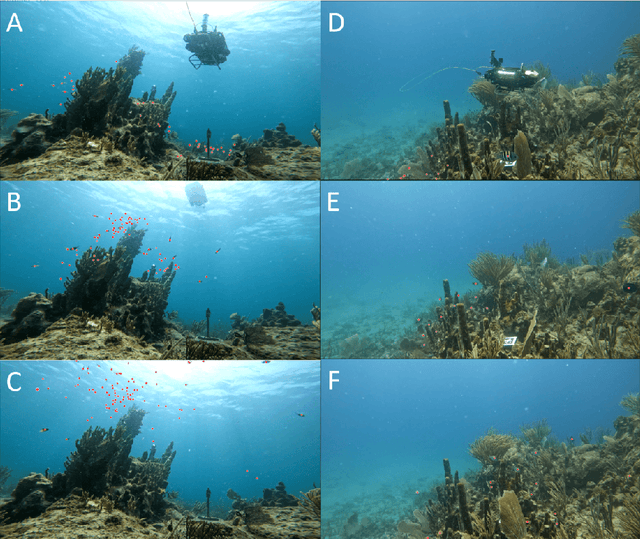
Do fish respond to the presence of underwater vehicles, potentially biasing our estimates about them? If so, are there strategies to measure and mitigate this response? This work provides a theoretical and practical framework towards bias-free estimation of animal behavior from underwater vehicle observations. We also provide preliminary results from the field in coral reef environments to address these questions.
CUREE: A Curious Underwater Robot for Ecosystem Exploration
Mar 07, 2023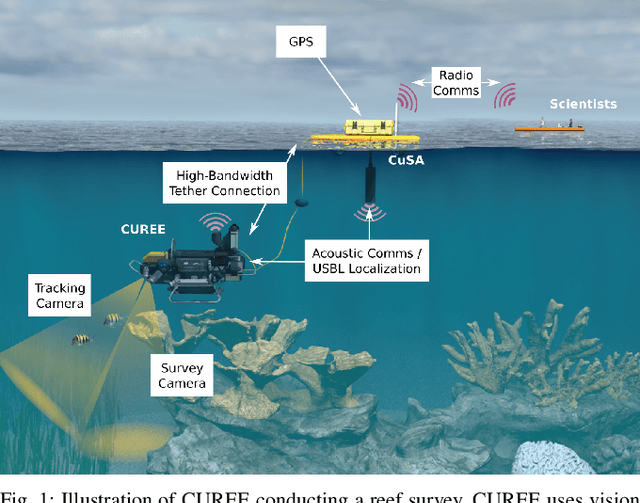
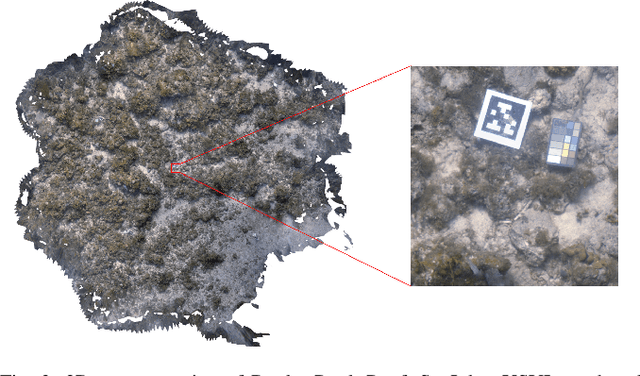
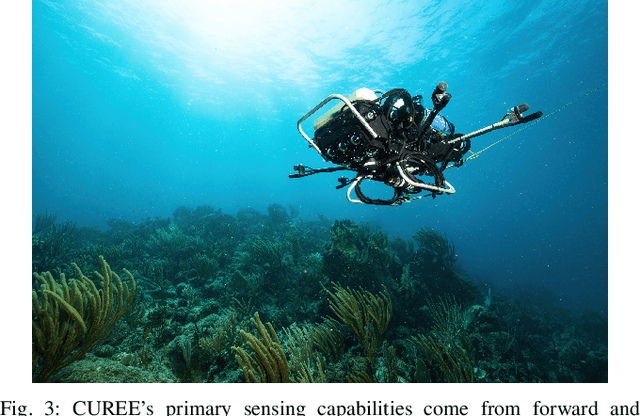
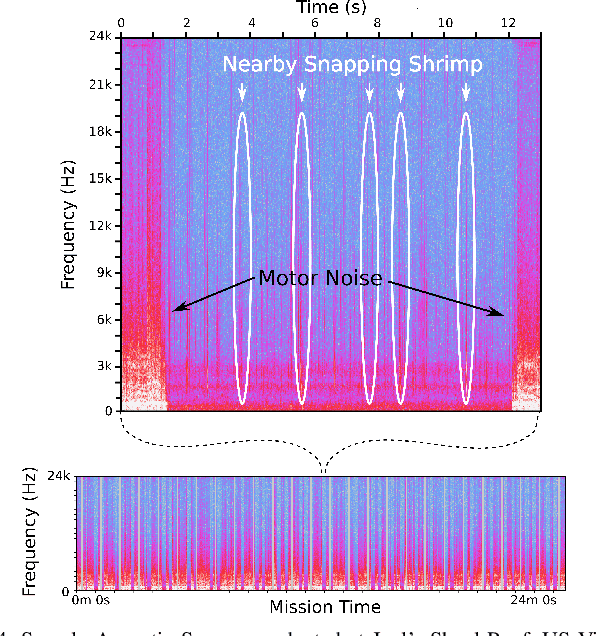
The current approach to exploring and monitoring complex underwater ecosystems, such as coral reefs, is to conduct surveys using diver-held or static cameras, or deploying sensor buoys. These approaches often fail to capture the full variation and complexity of interactions between different reef organisms and their habitat. The CUREE platform presented in this paper provides a unique set of capabilities in the form of robot behaviors and perception algorithms to enable scientists to explore different aspects of an ecosystem. Examples of these capabilities include low-altitude visual surveys, soundscape surveys, habitat characterization, and animal following. We demonstrate these capabilities by describing two field deployments on coral reefs in the US Virgin Islands. In the first deployment, we show that CUREE can identify the preferred habitat type of snapping shrimp in a reef through a combination of a visual survey, habitat characterization, and a soundscape survey. In the second deployment, we demonstrate CUREE's ability to follow arbitrary animals by separately following a barracuda and stingray for several minutes each in midwater and benthic environments, respectively.
* 7 pages
Semi-Supervised Visual Tracking of Marine Animals using Autonomous Underwater Vehicles
Feb 14, 2023In-situ visual observations of marine organisms is crucial to developing behavioural understandings and their relations to their surrounding ecosystem. Typically, these observations are collected via divers, tags, and remotely-operated or human-piloted vehicles. Recently, however, autonomous underwater vehicles equipped with cameras and embedded computers with GPU capabilities are being developed for a variety of applications, and in particular, can be used to supplement these existing data collection mechanisms where human operation or tags are more difficult. Existing approaches have focused on using fully-supervised tracking methods, but labelled data for many underwater species are severely lacking. Semi-supervised trackers may offer alternative tracking solutions because they require less data than fully-supervised counterparts. However, because there are not existing realistic underwater tracking datasets, the performance of semi-supervised tracking algorithms in the marine domain is not well understood. To better evaluate their performance and utility, in this paper we provide (1) a novel dataset specific to marine animals located at http://warp.whoi.edu/vmat/, (2) an evaluation of state-of-the-art semi-supervised algorithms in the context of underwater animal tracking, and (3) an evaluation of real-world performance through demonstrations using a semi-supervised algorithm on-board an autonomous underwater vehicle to track marine animals in the wild.