 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiological Hotspot Mapping in Coral Reefs with Robotic Visual Surveys
May 03, 2023
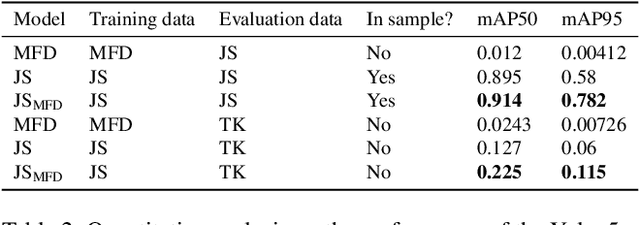
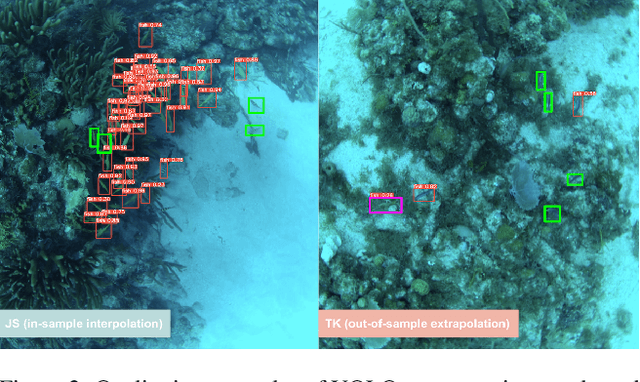
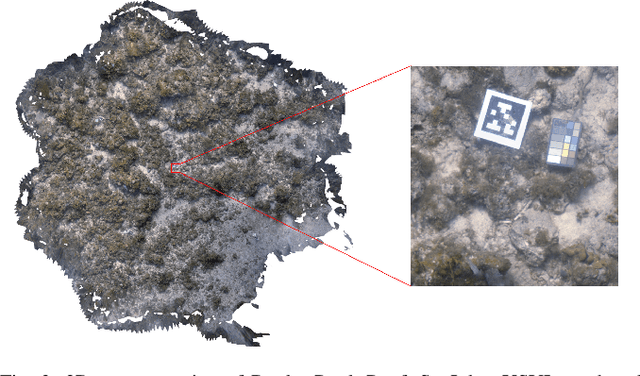
Coral reefs are fast-changing and complex ecosystems that are crucial to monitor and study. Biological hotspot detection can help coral reef managers prioritize limited resources for monitoring and intervention tasks. Here, we explore the use of autonomous underwater vehicles (AUVs) with cameras, coupled with visual detectors and photogrammetry, to map and identify these hotspots. This approach can provide high spatial resolution information in fast feedback cycles. To the best of our knowledge, we present one of the first attempts at using an AUV to gather visually-observed, fine-grain biological hotspot maps in concert with topography of a coral reefs. Our hotspot maps correlate with rugosity, an established proxy metric for coral reef biodiversity and abundance, as well as with our visual inspections of the 3D reconstruction. We also investigate issues of scaling this approach when applied to new reefs by using these visual detectors pre-trained on large public datasets.
DeepSeeColor: Realtime Adaptive Color Correction for Autonomous Underwater Vehicles via Deep Learning Methods
Mar 07, 2023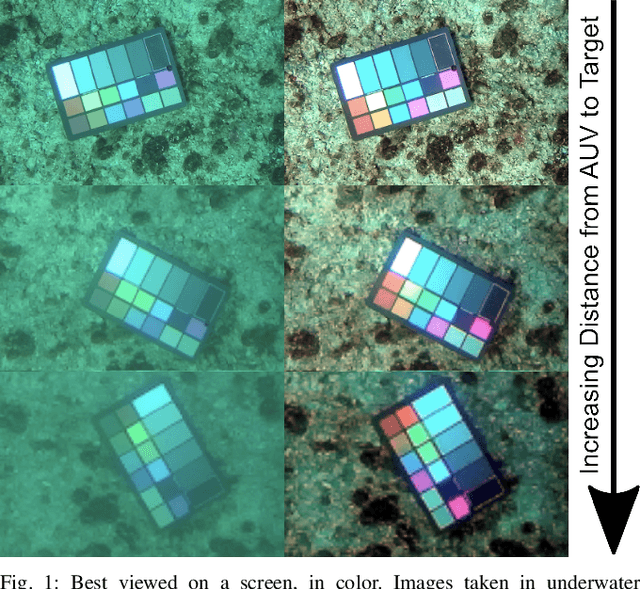
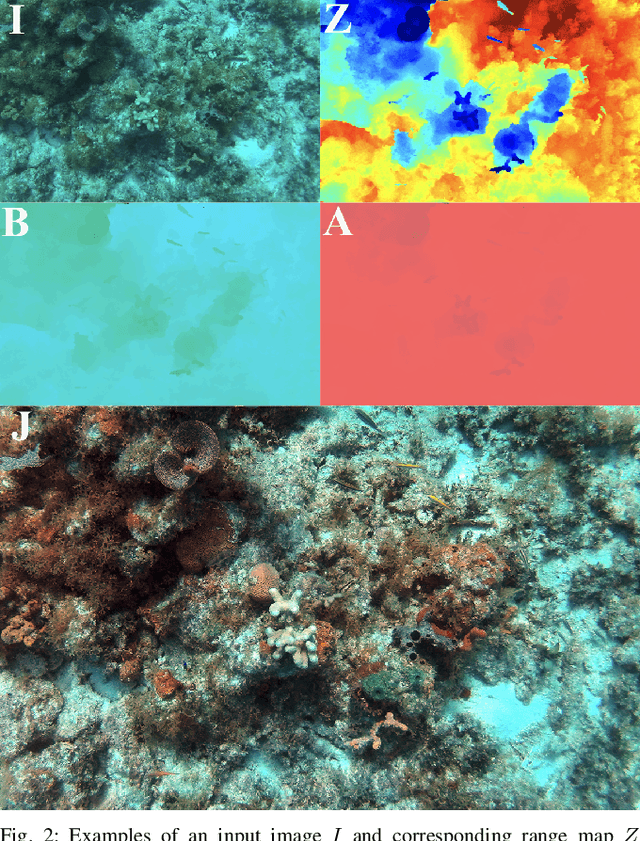
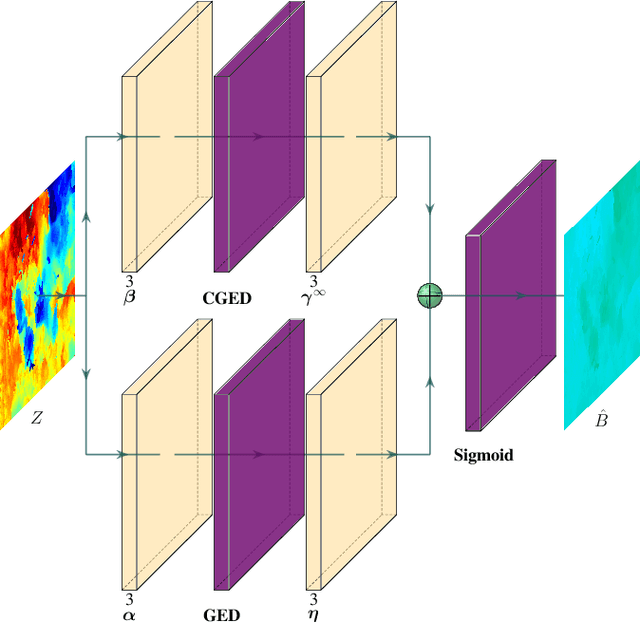
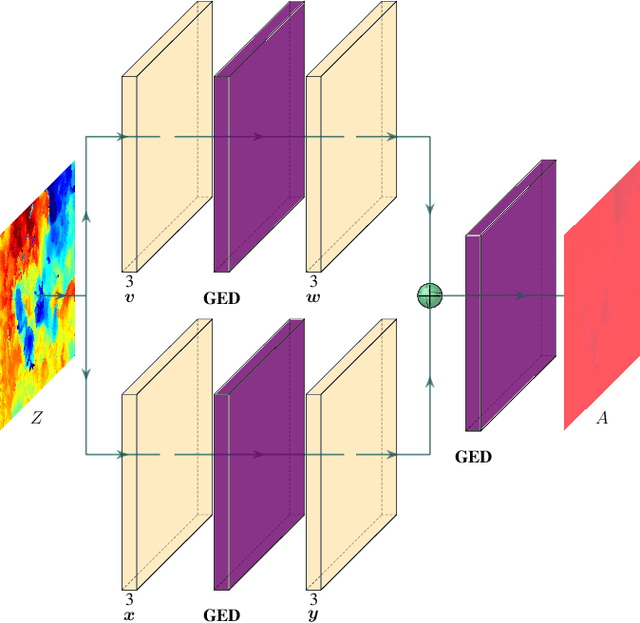
Successful applications of complex vision-based behaviours underwater have lagged behind progress in terrestrial and aerial domains. This is largely due to the degraded image quality resulting from the physical phenomena involved in underwater image formation. Spectrally-selective light attenuation drains some colors from underwater images while backscattering adds others, making it challenging to perform vision-based tasks underwater. State-of-the-art methods for underwater color correction optimize the parameters of image formation models to restore the full spectrum of color to underwater imagery. However, these methods have high computational complexity that is unfavourable for realtime use by autonomous underwater vehicles (AUVs), as a result of having been primarily designed for offline color correction. Here, we present DeepSeeColor, a novel algorithm that combines a state-of-the-art underwater image formation model with the computational efficiency of deep learning frameworks. In our experiments, we show that DeepSeeColor offers comparable performance to the popular "Sea-Thru" algorithm (Akkaynak & Treibitz, 2019) while being able to rapidly process images at up to 60Hz, thus making it suitable for use onboard AUVs as a preprocessing step to enable more robust vision-based behaviours.
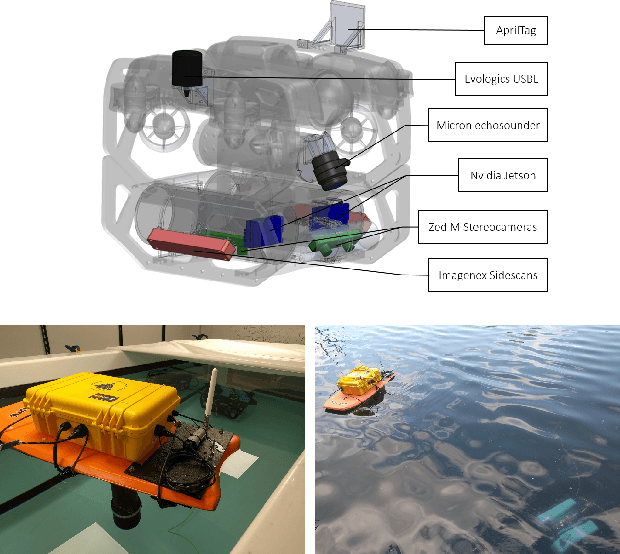
CUREE: A Curious Underwater Robot for Ecosystem Exploration
Mar 07, 2023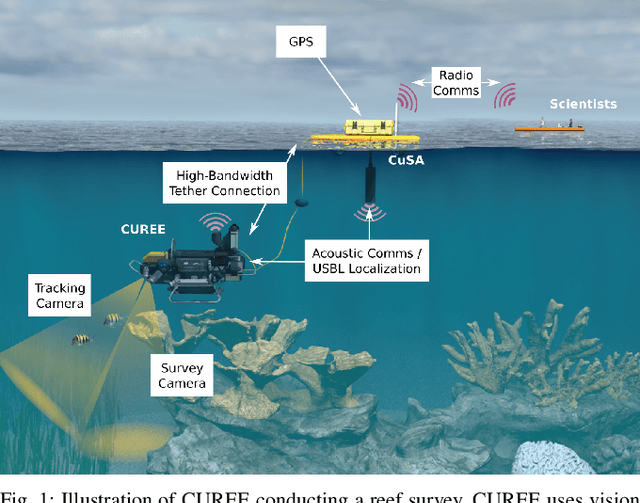
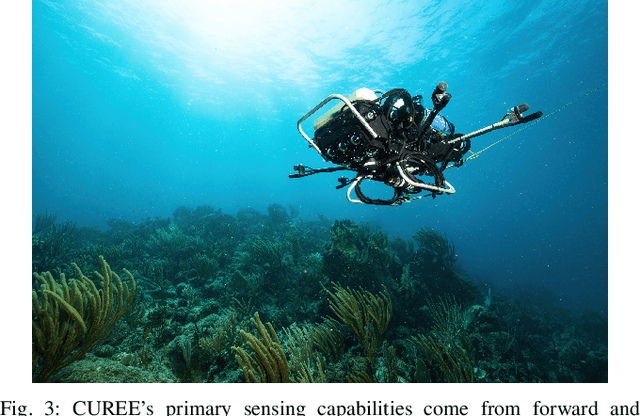
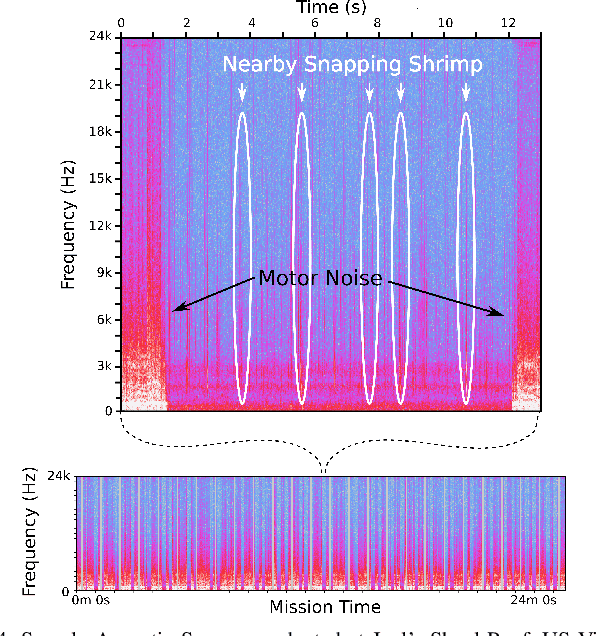
The current approach to exploring and monitoring complex underwater ecosystems, such as coral reefs, is to conduct surveys using diver-held or static cameras, or deploying sensor buoys. These approaches often fail to capture the full variation and complexity of interactions between different reef organisms and their habitat. The CUREE platform presented in this paper provides a unique set of capabilities in the form of robot behaviors and perception algorithms to enable scientists to explore different aspects of an ecosystem. Examples of these capabilities include low-altitude visual surveys, soundscape surveys, habitat characterization, and animal following. We demonstrate these capabilities by describing two field deployments on coral reefs in the US Virgin Islands. In the first deployment, we show that CUREE can identify the preferred habitat type of snapping shrimp in a reef through a combination of a visual survey, habitat characterization, and a soundscape survey. In the second deployment, we demonstrate CUREE's ability to follow arbitrary animals by separately following a barracuda and stingray for several minutes each in midwater and benthic environments, respectively.
* 7 pages
Multi-Robot Distributed Semantic Mapping in Unfamiliar Environments through Online Matching of Learned Representations
Mar 27, 2021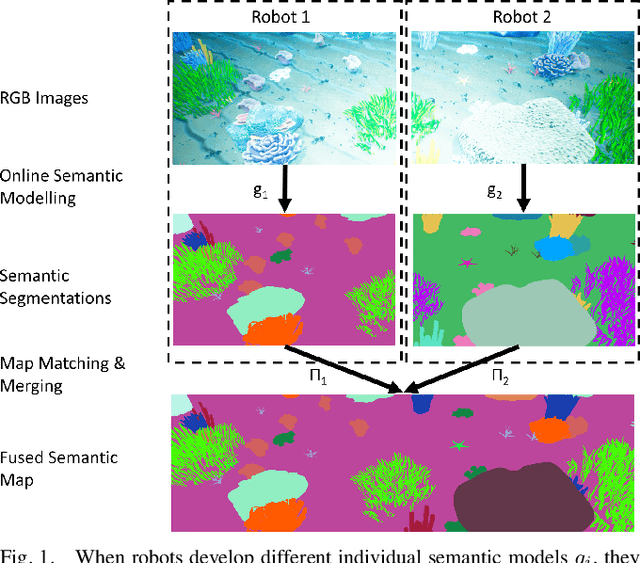
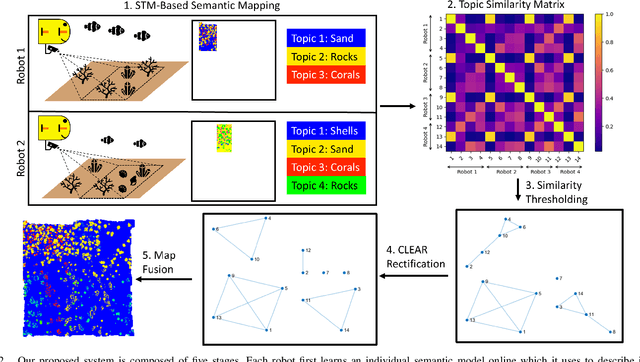
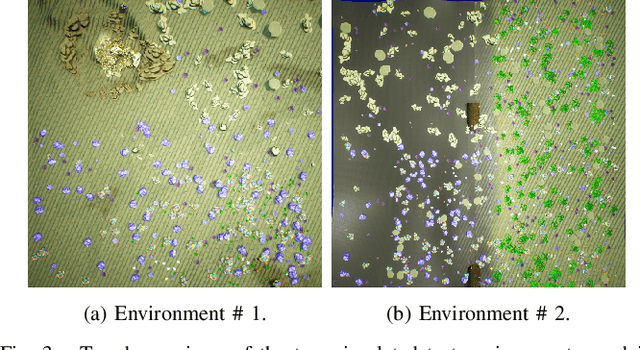
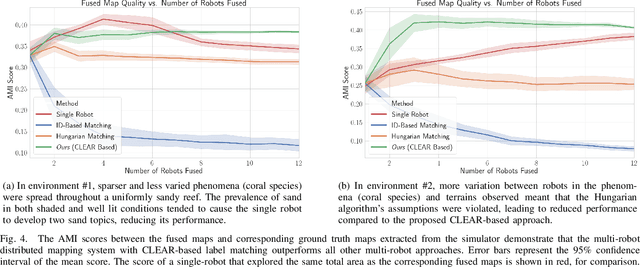
We present a solution to multi-robot distributed semantic mapping of novel and unfamiliar environments. Most state-of-the-art semantic mapping systems are based on supervised learning algorithms that cannot classify novel observations online. While unsupervised learning algorithms can invent labels for novel observations, approaches to detect when multiple robots have independently developed their own labels for the same new class are prone to erroneous or inconsistent matches. These issues worsen as the number of robots in the system increases and prevent fusing the local maps produced by each robot into a consistent global map, which is crucial for cooperative planning and joint mission summarization. Our proposed solution overcomes these obstacles by having each robot learn an unsupervised semantic scene model online and use a multiway matching algorithm to identify consistent sets of matches between learned semantic labels belonging to different robots. Compared to the state of the art, the proposed solution produces 20-60% higher quality global maps that do not degrade even as many more local maps are fused.
Active Reward Learning for Co-Robotic Vision Based Exploration in Bandwidth Limited Environments
Mar 10, 2020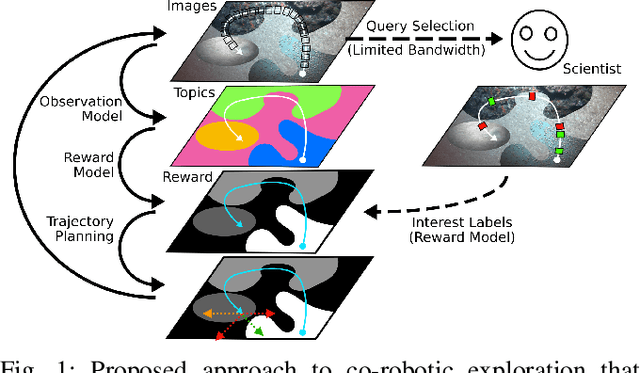
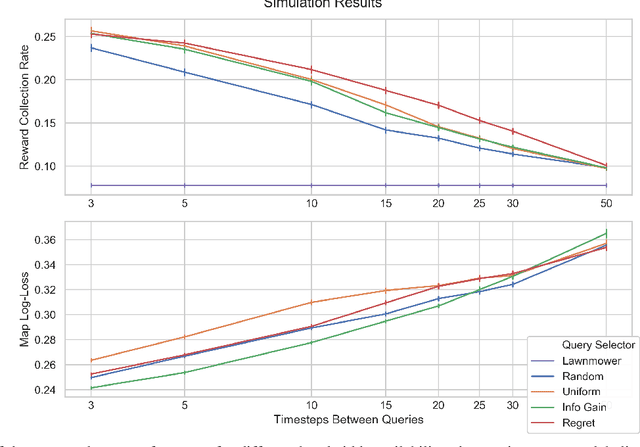
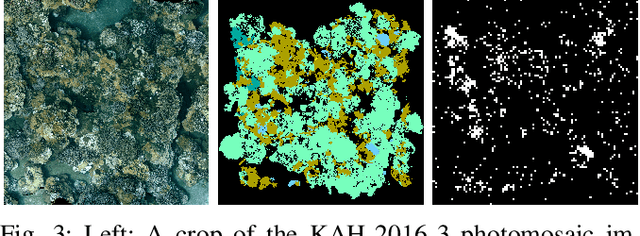
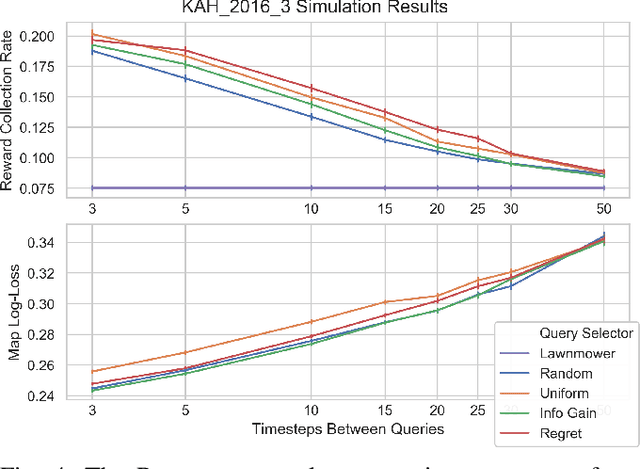
We present a novel POMDP problem formulation for a robot that must autonomously decide where to go to collect new and scientifically relevant images given a limited ability to communicate with its human operator. From this formulation we derive constraints and design principles for the observation model, reward model, and communication strategy of such a robot, exploring techniques to deal with the very high-dimensional observation space and scarcity of relevant training data. We introduce a novel active reward learning strategy based on making queries to help the robot minimize path "regret" online, and evaluate it for suitability in autonomous visual exploration through simulations. We demonstrate that, in some bandwidth-limited environments, this novel regret-based criterion enables the robotic explorer to collect up to 17% more reward per mission than the next-best criterion.
Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments
Mar 07, 2019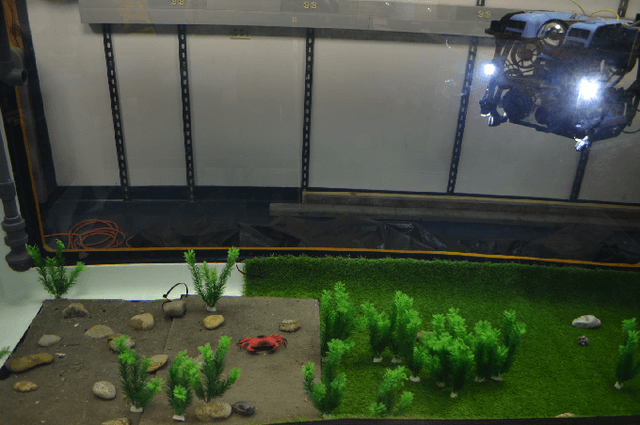
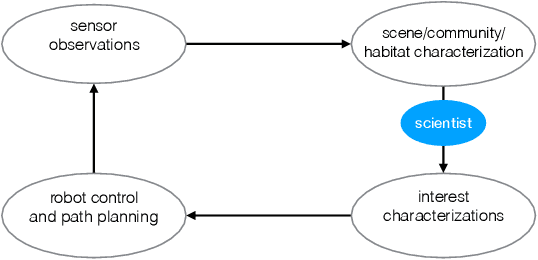
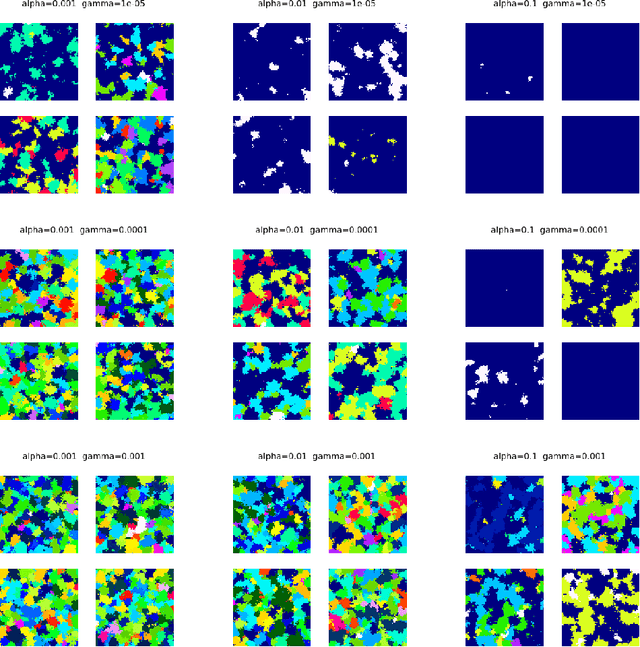
This paper proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters of the system enable the user to characterize the scene complexity represented by the map, which in turn determines the bandwidth requirements. The approach is demonstrated using an underwater robot that learns an unsupervised scene model of the environment and then uses this scene model to communicate the spatial distribution of various high-level semantic scene constructs to a human operator. Preliminary experiments in an artificially constructed tank environment as well as simulated missions over a 10m$\times$10m coral reef using real data show the tunability of the maps to different bandwidth constraints and science interests. To our knowledge this is the first paper to quantify how the free parameters of the unsupervised scene model impact both the scientific utility of and bandwidth required to communicate the resulting scene model.