 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Under-Ice Geochemical Observations with a Size, Weight, and Power-Constrained Robot
Sep 10, 2022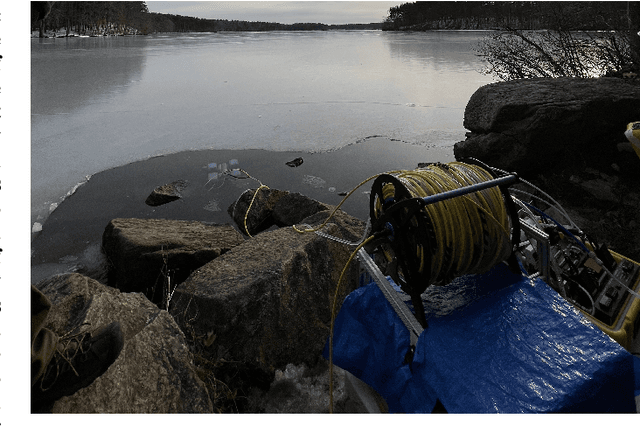



Estimates of greenhouse gas emissions from Arctic estuarine environments are dominated by in situ summer-time ice-free dissolved gas measurements due to the logistical ease of performing field observations in these conditions. Recent evidence in coastal Arctic environments, however, has demonstrated that dissolved methane (CH4) and carbon dioxide (CO2) are strongly seasonally variable, and at least one significant gas ventilation event occurs during the spring freshet. Whether the Arctic serves as a source or sink of greenhouse emissions has significant implications on modeling climate change and its feedback mechanisms. To enable higher resolution spatiotemporal measurements of dissolved gases in typically undersampled conditions, remotely operated vehicles (ROVs) can be used to extract near continuous water samples below ice before and during the spring freshet. Here, we present a size, weight, and power-constrained (SWAP) underwater vehicle (UV) and novel geochemical sampling system suitable for taking under-ice geochemical observations and demonstrate the proposed system in a field-analog setting for Arctic estuarine studies.
Robotic Planning under Uncertainty in Spatiotemporal Environments in Expeditionary Science
Jun 03, 2022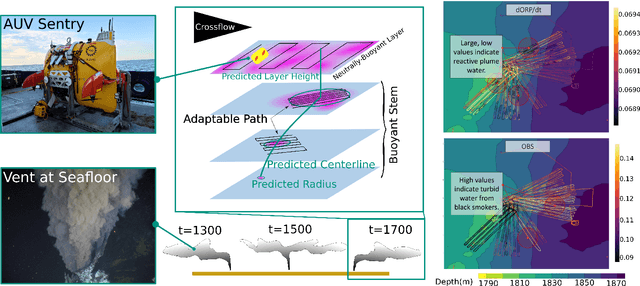
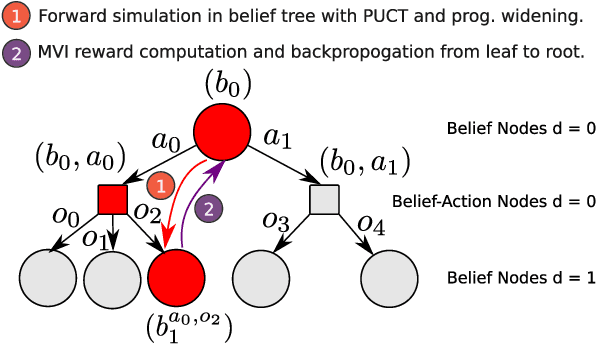
In the expeditionary sciences, spatiotemporally varying environments -- hydrothermal plumes, algal blooms, lava flows, or animal migrations -- are ubiquitous. Mobile robots are uniquely well-suited to study these dynamic, mesoscale natural environments. We formalize expeditionary science as a sequential decision-making problem, modeled using the language of partially-observable Markov decision processes (POMDPs). Solving the expeditionary science POMDP under real-world constraints requires efficient probabilistic modeling and decision-making in problems with complex dynamics and observational models. Previous work in informative path planning, adaptive sampling, and experimental design have shown compelling results, largely in static environments, using data-driven models and information-based rewards. However, these methodologies do not trivially extend to expeditionary science in spatiotemporal environments: they generally do not make use of scientific knowledge such as equations of state dynamics, they focus on information gathering as opposed to scientific task execution, and they make use of decision-making approaches that scale poorly to large, continuous problems with long planning horizons and real-time operational constraints. In this work, we discuss these and other challenges related to probabilistic modeling and decision-making in expeditionary science, and present some of our preliminary work that addresses these gaps. We ground our results in a real expeditionary science deployment of an autonomous underwater vehicle (AUV) in the deep ocean for hydrothermal vent discovery and characterization. Our concluding thoughts highlight remaining work to be done, and the challenges that merit consideration by the reinforcement learning and decision-making community.
Information-Guided Robotic Maximum Seek-and-Sample in Partially Observable Continuous Environments
Sep 26, 2019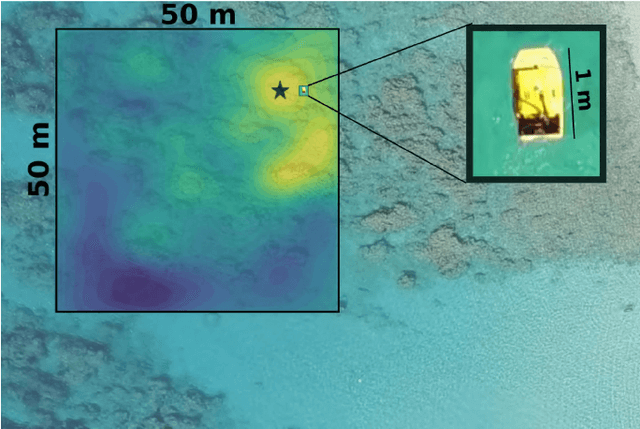
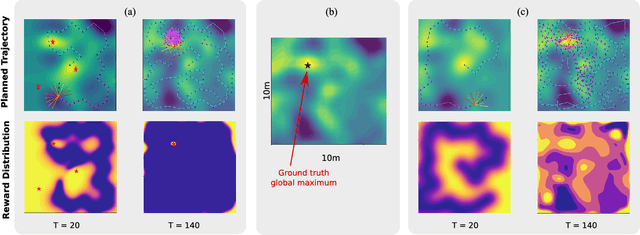
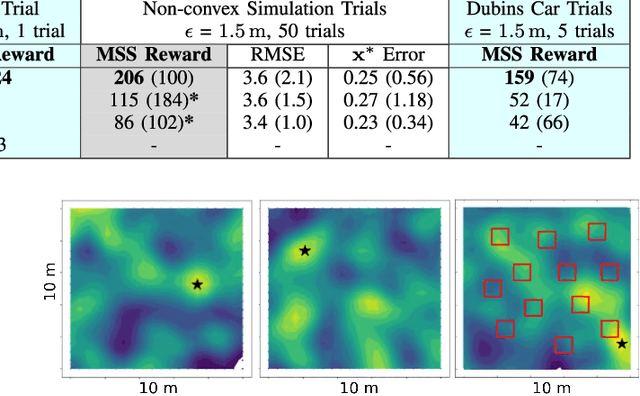
We present PLUMES, a planner to localizing and collecting samples at the global maximum of an a priori unknown and partially observable continuous environment. The "maximum-seek-and-sample" (MSS) problem is pervasive in the environmental and earth sciences. Experts want to collect scientifically valuable samples at an environmental maximum (e.g., an oil-spill source), but do not have prior knowledge about the phenomenon's distribution. We formulate the MSS problem as a partially-observable Markov decision process (POMDP) with continuous state and observation spaces, and a sparse reward signal. To solve the MSS POMDP, PLUMES uses an information-theoretic reward heuristic with continous-observation Monte Carlo Tree Search to efficiently localize and sample from the global maximum. In simulation and field experiments, PLUMES collects more scientifically valuable samples than state-of-the-art planners in a diverse set of environments, with various platforms, sensors, and challenging real-world conditions.
* 8 pages, 8 figures, To appear in the proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 Macau