 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBarrier functions enable safety-conscious force-feedback control
Sep 25, 2022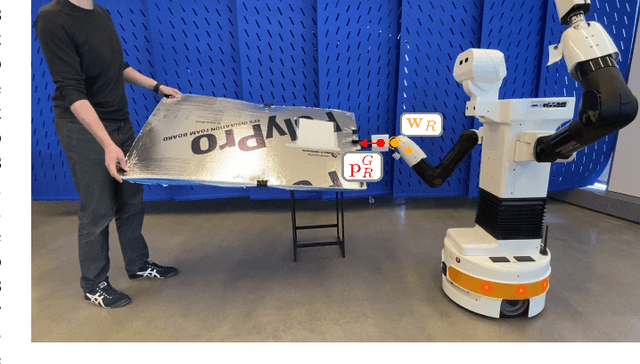
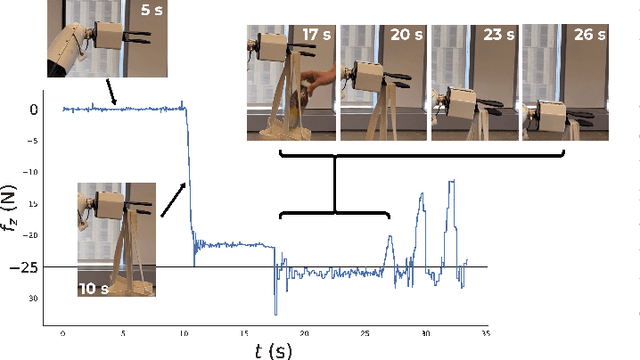
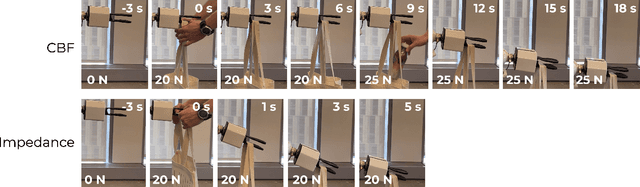
In order to be effective partners for humans, robots must become increasingly comfortable with making contact with their environment. Unfortunately, it is hard for robots to distinguish between ``just enough'' and ``too much'' force: some force is required to accomplish the task but too much might damage equipment or injure humans. Traditional approaches to designing compliant force-feedback controllers, such as stiffness control, require difficult hand-tuning of control parameters and make it difficult to build safe, effective robot collaborators. In this paper, we propose a novel yet easy-to-implement force feedback controller that uses control barrier functions (CBFs) to derive a compliant controller directly from users' specifications of the maximum allowable forces and torques. We compare our approach to traditional stiffness control to demonstrate potential advantages of our control architecture, and we demonstrate the effectiveness of our controller on an example human-robot collaboration task: cooperative manipulation of a bulky object.
Solving the Baby Intuitions Benchmark with a Hierarchically Bayesian Theory of Mind
Aug 04, 2022


To facilitate the development of new models to bridge the gap between machine and human social intelligence, the recently proposed Baby Intuitions Benchmark (arXiv:2102.11938) provides a suite of tasks designed to evaluate commonsense reasoning about agents' goals and actions that even young infants exhibit. Here we present a principled Bayesian solution to this benchmark, based on a hierarchically Bayesian Theory of Mind (HBToM). By including hierarchical priors on agent goals and dispositions, inference over our HBToM model enables few-shot learning of the efficiency and preferences of an agent, which can then be used in commonsense plausibility judgements about subsequent agent behavior. This approach achieves near-perfect accuracy on most benchmark tasks, outperforming deep learning and imitation learning baselines while producing interpretable human-like inferences, demonstrating the advantages of structured Bayesian models of human social cognition.
3DP3: 3D Scene Perception via Probabilistic Programming
Oct 30, 2021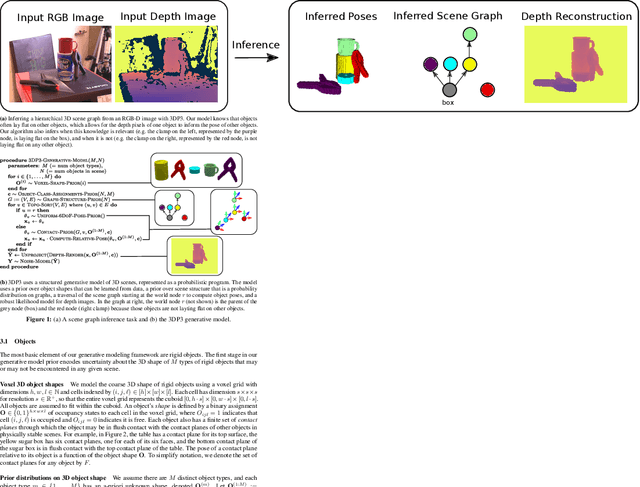
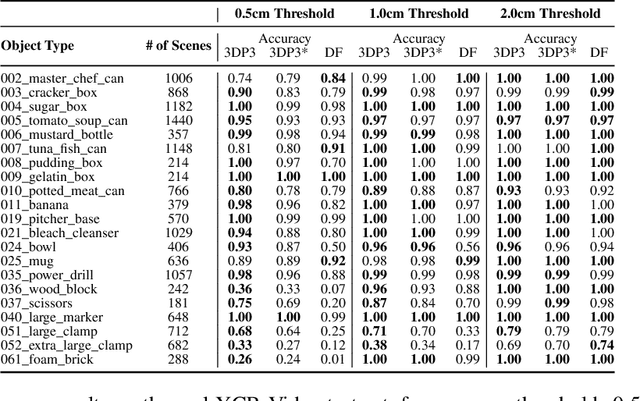
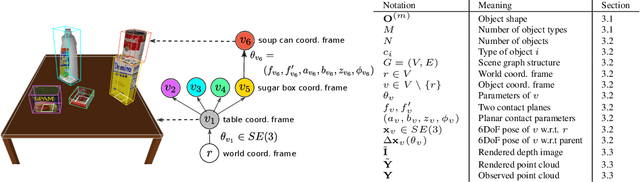
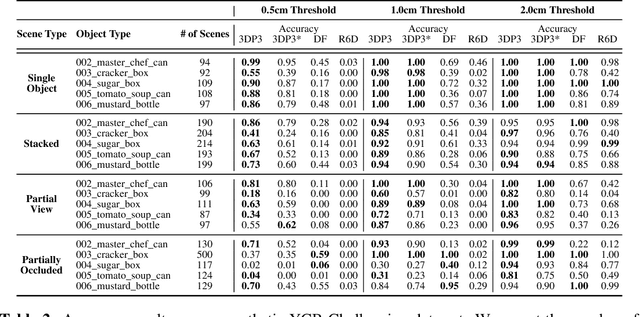
We present 3DP3, a framework for inverse graphics that uses inference in a structured generative model of objects, scenes, and images. 3DP3 uses (i) voxel models to represent the 3D shape of objects, (ii) hierarchical scene graphs to decompose scenes into objects and the contacts between them, and (iii) depth image likelihoods based on real-time graphics. Given an observed RGB-D image, 3DP3's inference algorithm infers the underlying latent 3D scene, including the object poses and a parsimonious joint parametrization of these poses, using fast bottom-up pose proposals, novel involutive MCMC updates of the scene graph structure, and, optionally, neural object detectors and pose estimators. We show that 3DP3 enables scene understanding that is aware of 3D shape, occlusion, and contact structure. Our results demonstrate that 3DP3 is more accurate at 6DoF object pose estimation from real images than deep learning baselines and shows better generalization to challenging scenes with novel viewpoints, contact, and partial observability.
FfDL : A Flexible Multi-tenant Deep Learning Platform
Sep 14, 2019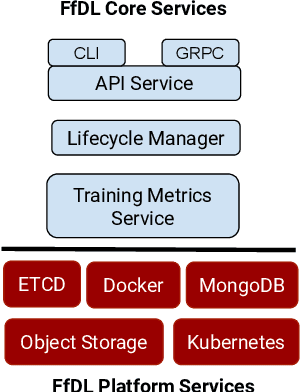
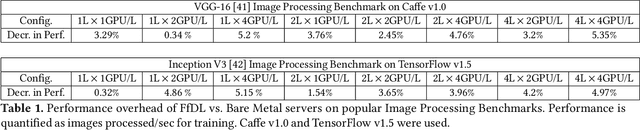
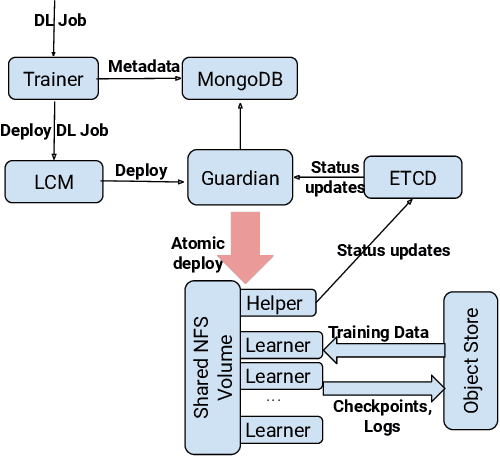
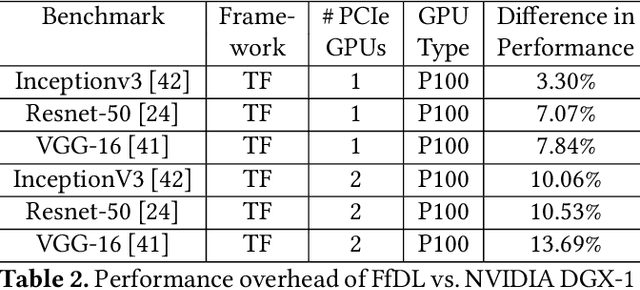
Deep learning (DL) is becoming increasingly popular in several application domains and has made several new application features involving computer vision, speech recognition and synthesis, self-driving automobiles, drug design, etc. feasible and accurate. As a result, large scale on-premise and cloud-hosted deep learning platforms have become essential infrastructure in many organizations. These systems accept, schedule, manage and execute DL training jobs at scale. This paper describes the design, implementation and our experiences with FfDL, a DL platform used at IBM. We describe how our design balances dependability with scalability, elasticity, flexibility and efficiency. We examine FfDL qualitatively through a retrospective look at the lessons learned from building, operating, and supporting FfDL; and quantitatively through a detailed empirical evaluation of FfDL, including the overheads introduced by the platform for various deep learning models, the load and performance observed in a real case study using FfDL within our organization, the frequency of various faults observed including unanticipated faults, and experiments demonstrating the benefits of various scheduling policies. FfDL has been open-sourced.