 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DP3: 3D Scene Perception via Probabilistic Programming
Oct 30, 2021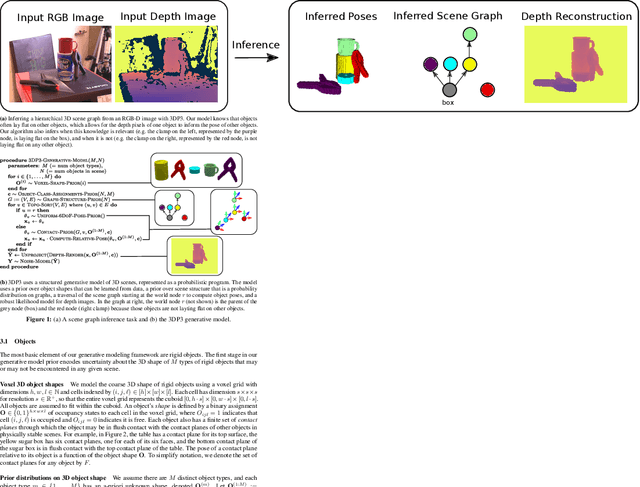
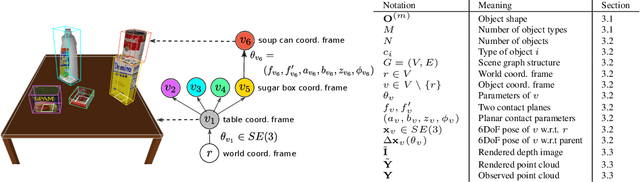
We present 3DP3, a framework for inverse graphics that uses inference in a structured generative model of objects, scenes, and images. 3DP3 uses (i) voxel models to represent the 3D shape of objects, (ii) hierarchical scene graphs to decompose scenes into objects and the contacts between them, and (iii) depth image likelihoods based on real-time graphics. Given an observed RGB-D image, 3DP3's inference algorithm infers the underlying latent 3D scene, including the object poses and a parsimonious joint parametrization of these poses, using fast bottom-up pose proposals, novel involutive MCMC updates of the scene graph structure, and, optionally, neural object detectors and pose estimators. We show that 3DP3 enables scene understanding that is aware of 3D shape, occlusion, and contact structure. Our results demonstrate that 3DP3 is more accurate at 6DoF object pose estimation from real images than deep learning baselines and shows better generalization to challenging scenes with novel viewpoints, contact, and partial observability.
Probabilistic Programming with Gaussian Process Memoization
Jan 05, 2016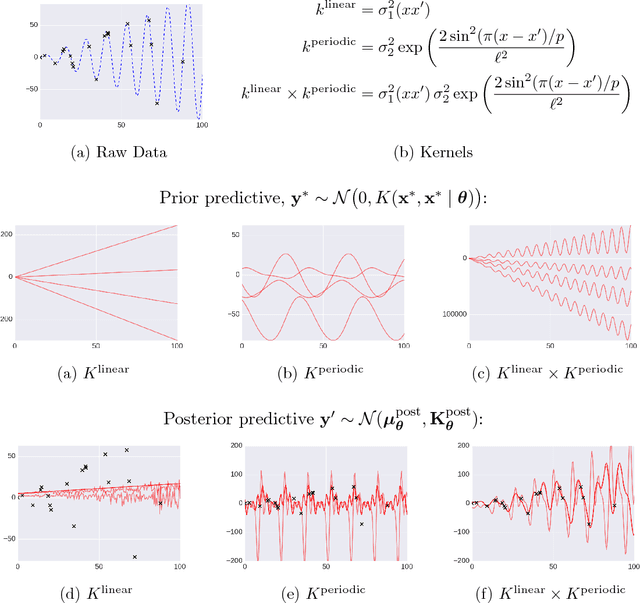
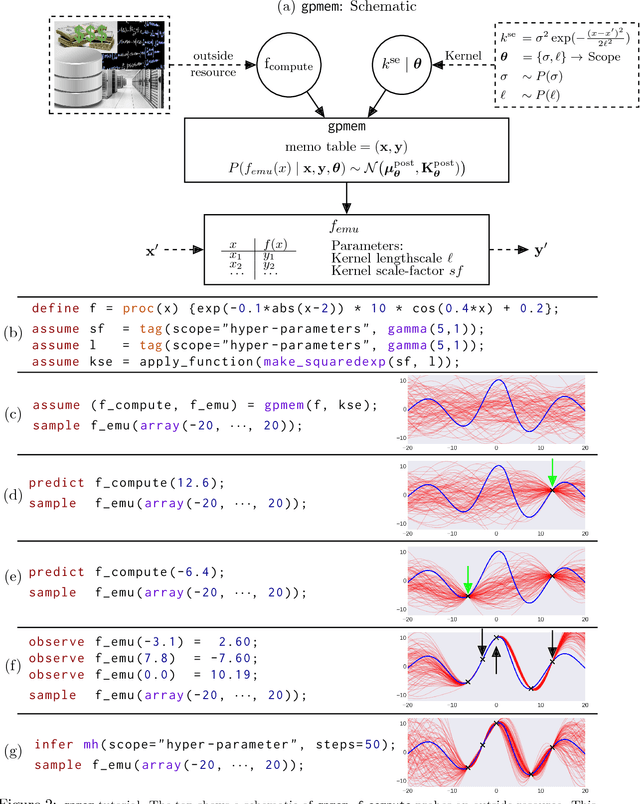
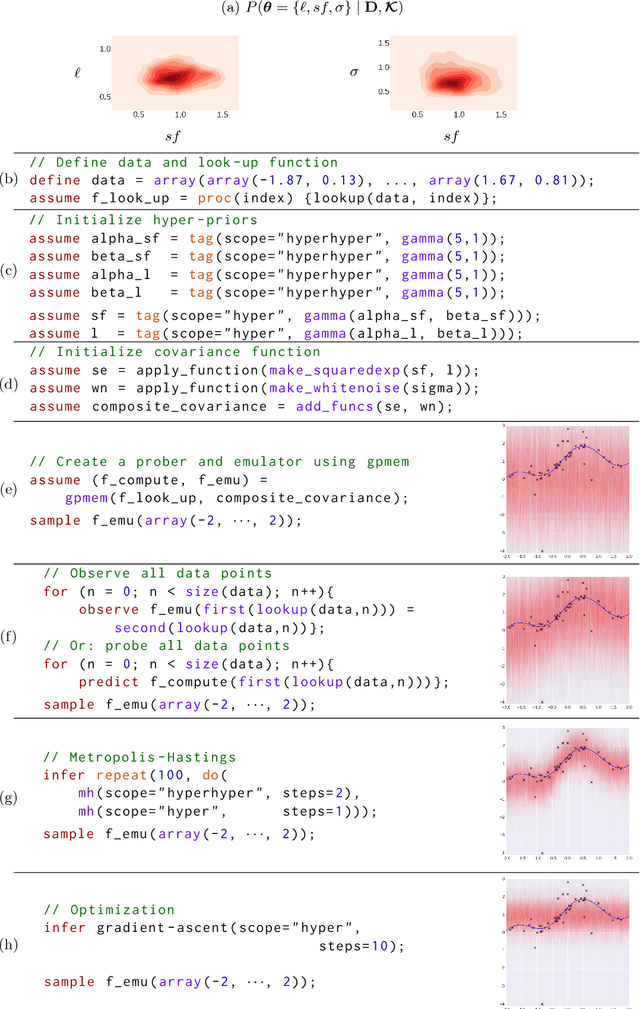
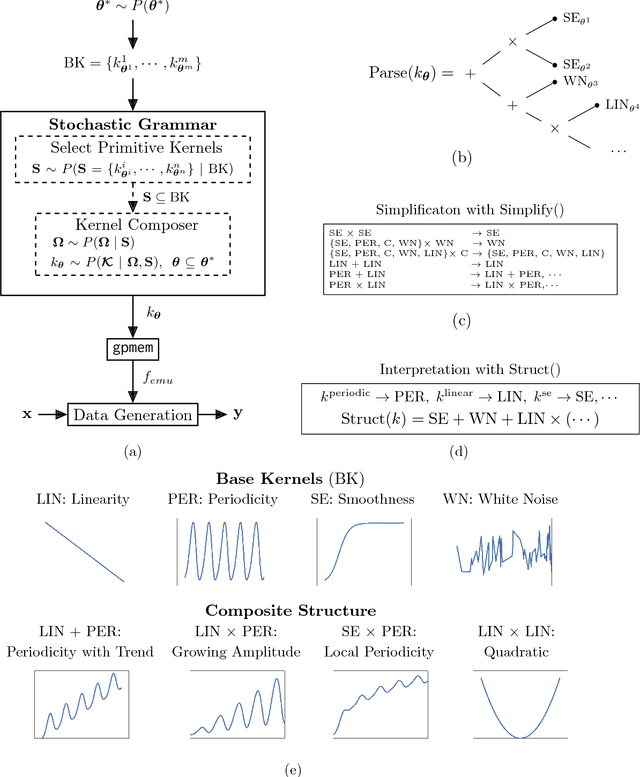
Gaussian Processes (GPs) are widely used tools in statistics, machine learning, robotics, computer vision, and scientific computation. However, despite their popularity, they can be difficult to apply; all but the simplest classification or regression applications require specification and inference over complex covariance functions that do not admit simple analytical posteriors. This paper shows how to embed Gaussian processes in any higher-order probabilistic programming language, using an idiom based on memoization, and demonstrates its utility by implementing and extending classic and state-of-the-art GP applications. The interface to Gaussian processes, called gpmem, takes an arbitrary real-valued computational process as input and returns a statistical emulator that automatically improve as the original process is invoked and its input-output behavior is recorded. The flexibility of gpmem is illustrated via three applications: (i) robust GP regression with hierarchical hyper-parameter learning, (ii) discovering symbolic expressions from time-series data by fully Bayesian structure learning over kernels generated by a stochastic grammar, and (iii) a bandit formulation of Bayesian optimization with automatic inference and action selection. All applications share a single 50-line Python library and require fewer than 20 lines of probabilistic code each.