 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpanding on the BRIAR Dataset: A Comprehensive Whole Body Biometric Recognition Resource at Extreme Distances and Real-World Scenarios (Collections 1-4)
Jan 23, 2025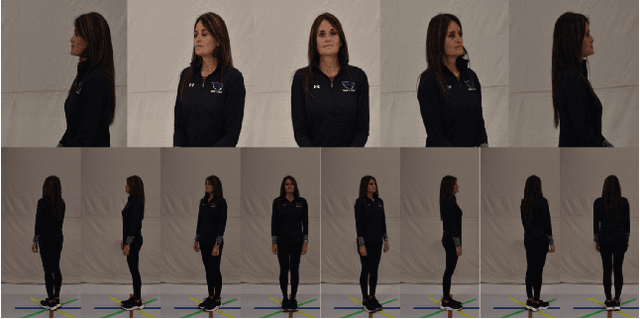
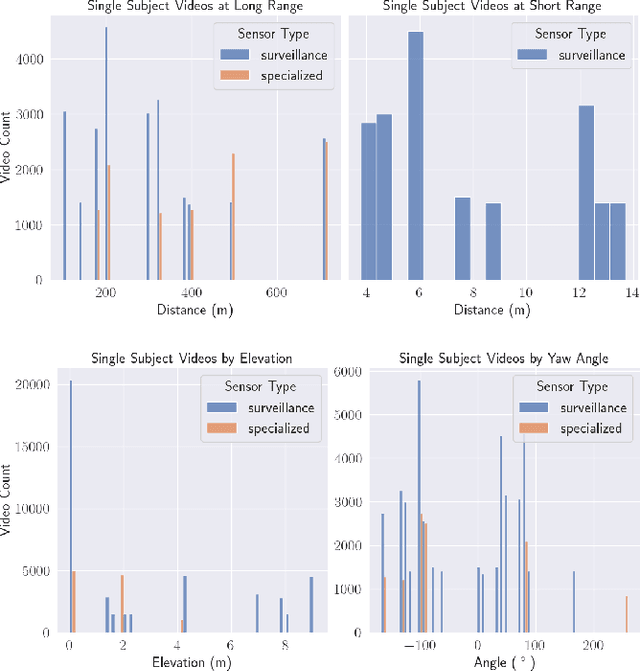
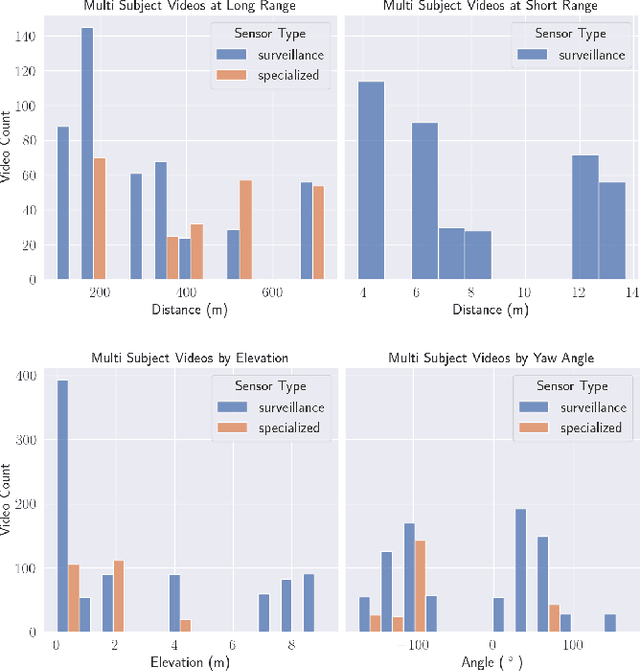
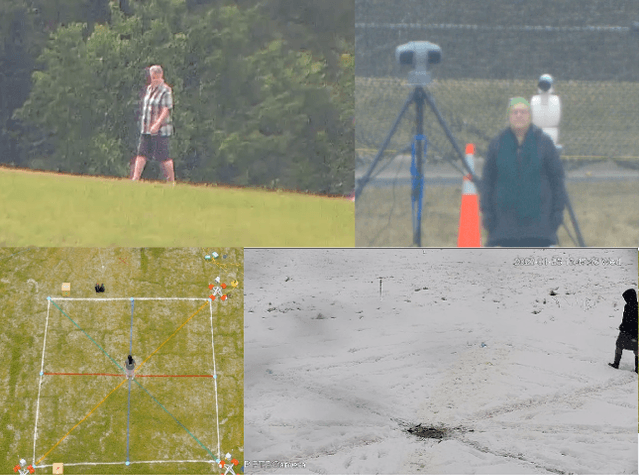
The state-of-the-art in biometric recognition algorithms and operational systems has advanced quickly in recent years providing high accuracy and robustness in more challenging collection environments and consumer applications. However, the technology still suffers greatly when applied to non-conventional settings such as those seen when performing identification at extreme distances or from elevated cameras on buildings or mounted to UAVs. This paper summarizes an extension to the largest dataset currently focused on addressing these operational challenges, and describes its composition as well as methodologies of collection, curation, and annotation.
Barrier functions enable safety-conscious force-feedback control
Sep 25, 2022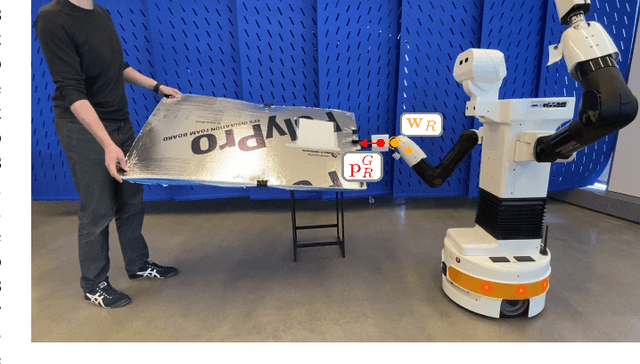
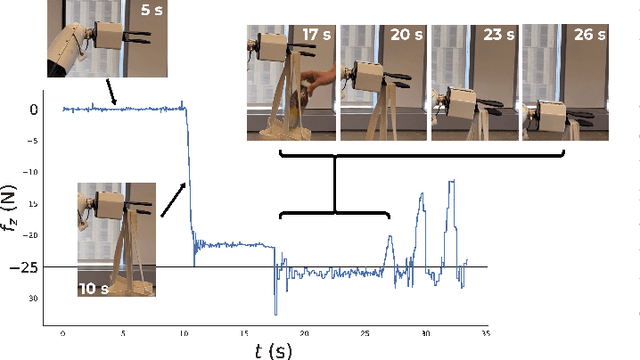
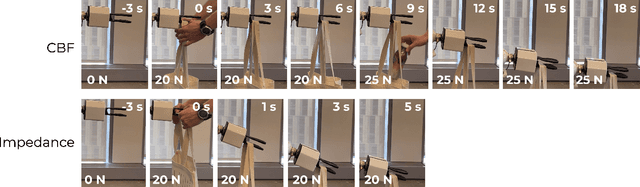
In order to be effective partners for humans, robots must become increasingly comfortable with making contact with their environment. Unfortunately, it is hard for robots to distinguish between ``just enough'' and ``too much'' force: some force is required to accomplish the task but too much might damage equipment or injure humans. Traditional approaches to designing compliant force-feedback controllers, such as stiffness control, require difficult hand-tuning of control parameters and make it difficult to build safe, effective robot collaborators. In this paper, we propose a novel yet easy-to-implement force feedback controller that uses control barrier functions (CBFs) to derive a compliant controller directly from users' specifications of the maximum allowable forces and torques. We compare our approach to traditional stiffness control to demonstrate potential advantages of our control architecture, and we demonstrate the effectiveness of our controller on an example human-robot collaboration task: cooperative manipulation of a bulky object.
3DP3: 3D Scene Perception via Probabilistic Programming
Oct 30, 2021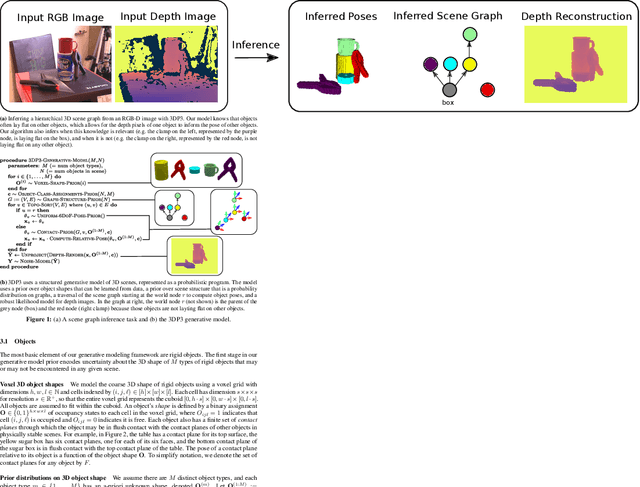
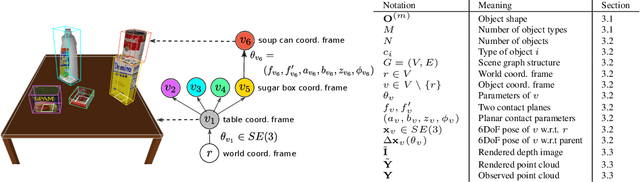
We present 3DP3, a framework for inverse graphics that uses inference in a structured generative model of objects, scenes, and images. 3DP3 uses (i) voxel models to represent the 3D shape of objects, (ii) hierarchical scene graphs to decompose scenes into objects and the contacts between them, and (iii) depth image likelihoods based on real-time graphics. Given an observed RGB-D image, 3DP3's inference algorithm infers the underlying latent 3D scene, including the object poses and a parsimonious joint parametrization of these poses, using fast bottom-up pose proposals, novel involutive MCMC updates of the scene graph structure, and, optionally, neural object detectors and pose estimators. We show that 3DP3 enables scene understanding that is aware of 3D shape, occlusion, and contact structure. Our results demonstrate that 3DP3 is more accurate at 6DoF object pose estimation from real images than deep learning baselines and shows better generalization to challenging scenes with novel viewpoints, contact, and partial observability.