 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Beamforming and Position Design for Movable Antenna Assisted LEO ISAC Systems
Nov 06, 2025Low earth orbit (LEO) satellite-assisted integrated sensing and communications (ISAC) systems have been extensively studied to achieve ubiquitous connectivity. However, the severe signal attenuation and limited transmit power at LEO satellites can degrade ISAC performance. To address this issue, this paper investigated movable antenna (MA)-assisted LEO ISAC systems. We derive the communication signal-to-interference-plus-noise ratio (SINR) and the sensing squared position error bound (SPEB) for evaluating the ISAC performance. Then, we jointly optimize the transmit beamforming and the MA positions to minimize the SPEB under the SINR constraints, total transmit power constraint, and several inherent physical constraints of the MA array. We first simplify the complex problem using the semidefinite relaxation (SDR). Then, we present a novel alternating optimization (AO)-based algorithm to decouple the original problem into two subproblems, consequently convexified and solved. Simulations demonstrate the convergence and effectiveness of the proposed algorithm. Better trade-off between communication and sensing performance, and at least 25% gain in sensing performance are achieved, compared to the benchmarks.
LAPA-based Dynamic Privacy Optimization for Wireless Federated Learning in Heterogeneous Environments
May 26, 2025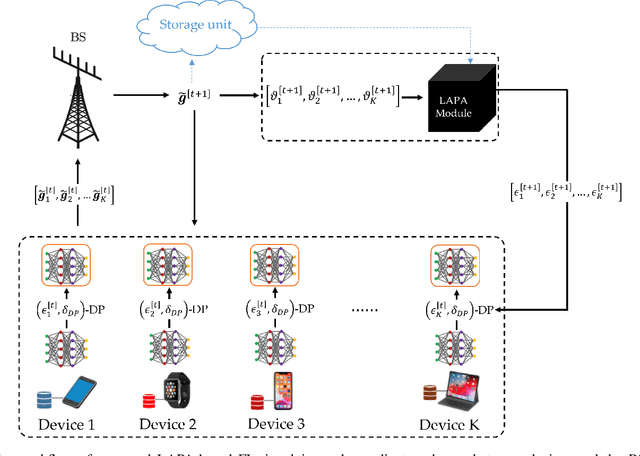
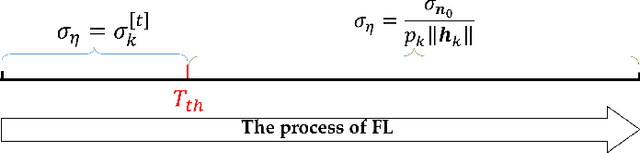
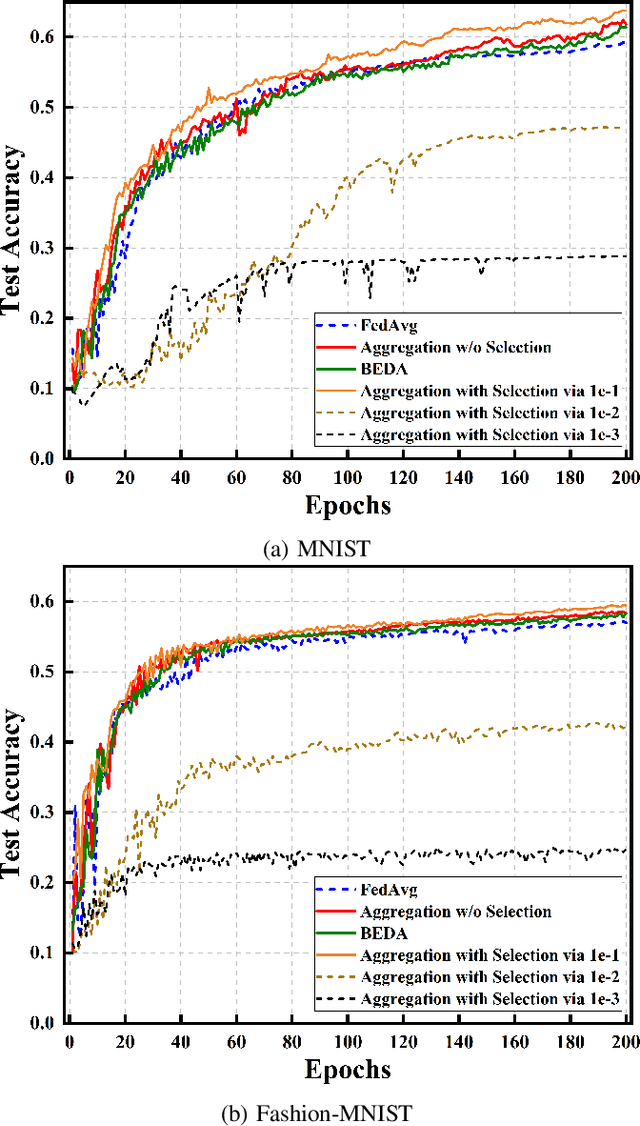
Federated Learning (FL) is a distributed machine learning paradigm based on protecting data privacy of devices, which however, can still be broken by gradient leakage attack via parameter inversion techniques. Differential privacy (DP) technology reduces the risk of private data leakage by adding artificial noise to the gradients, but detrimental to the FL utility at the same time, especially in the scenario where the data is Non-Independent Identically Distributed (Non-IID). Based on the impact of heterogeneous data on aggregation performance, this paper proposes a Lightweight Adaptive Privacy Allocation (LAPA) strategy, which assigns personalized privacy budgets to devices in each aggregation round without transmitting any additional information beyond gradients, ensuring both privacy protection and aggregation efficiency. Furthermore, the Deep Deterministic Policy Gradient (DDPG) algorithm is employed to optimize the transmission power, in order to determine the optimal timing at which the adaptively attenuated artificial noise aligns with the communication noise, enabling an effective balance between DP and system utility. Finally, a reliable aggregation strategy is designed by integrating communication quality and data distribution characteristics, which improves aggregation performance while preserving privacy. Experimental results demonstrate that the personalized noise allocation and dynamic optimization strategy based on LAPA proposed in this paper enhances convergence performance while satisfying the privacy requirements of FL.
Cluster-Aware Multi-Round Update for Wireless Federated Learning in Heterogeneous Environments
May 06, 2025The aggregation efficiency and accuracy of wireless Federated Learning (FL) are significantly affected by resource constraints, especially in heterogeneous environments where devices exhibit distinct data distributions and communication capabilities. This paper proposes a clustering strategy that leverages prior knowledge similarity to group devices with similar data and communication characteristics, mitigating performance degradation from heterogeneity. On this basis, a novel Cluster- Aware Multi-round Update (CAMU) strategy is proposed, which treats clusters as the basic units and adjusts the local update frequency based on the clustered contribution threshold, effectively reducing update bias and enhancing aggregation accuracy. The theoretical convergence of the CAMU strategy is rigorously validated. Meanwhile, based on the convergence upper bound, the local update frequency and transmission power of each cluster are jointly optimized to achieve an optimal balance between computation and communication resources under constrained conditions, significantly improving the convergence efficiency of FL. Experimental results demonstrate that the proposed method effectively improves the model performance of FL in heterogeneous environments and achieves a better balance between communication cost and computational load under limited resources.
Multi-Continental Healthcare Modelling Using Blockchain-Enabled Federated Learning
Oct 23, 2024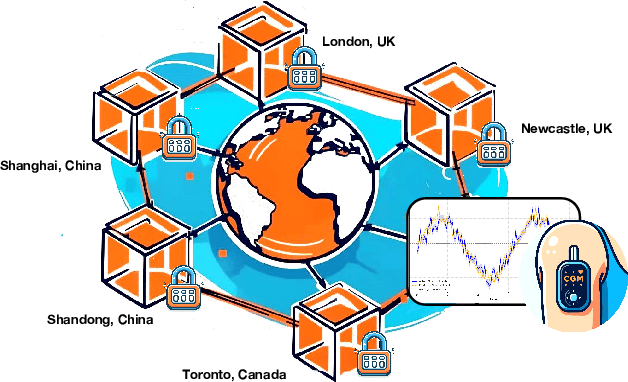
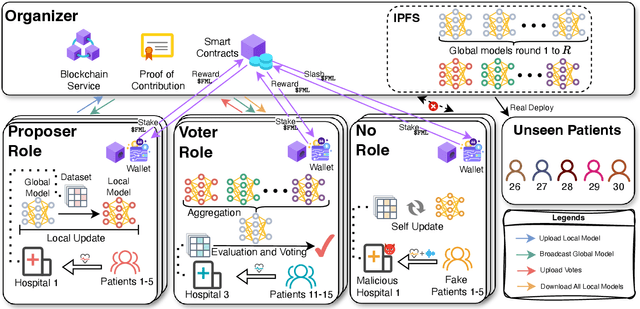
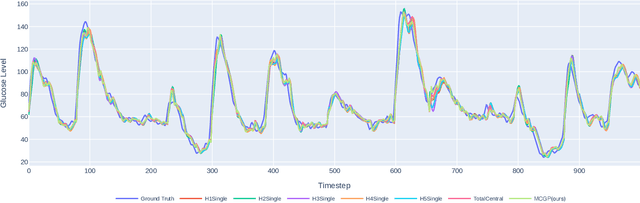
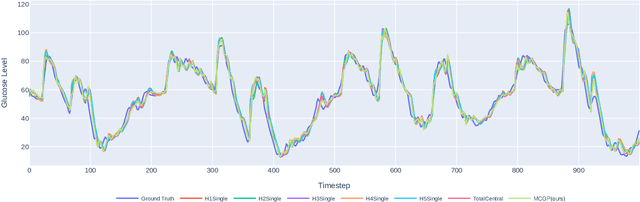
One of the biggest challenges of building artificial intelligence (AI) model in healthcare area is the data sharing. Since healthcare data is private, sensitive, and heterogeneous, collecting sufficient data for modelling is exhausted, costly, and sometimes impossible. In this paper, we propose a framework for global healthcare modelling using datasets from multi-continents (Europe, North America and Asia) while without sharing the local datasets, and choose glucose management as a study model to verify its effectiveness. Technically, blockchain-enabled federated learning is implemented with adaption to make it meet with the privacy and safety requirements of healthcare data, meanwhile rewards honest participation and penalize malicious activities using its on-chain incentive mechanism. Experimental results show that the proposed framework is effective, efficient, and privacy preserved. Its prediction accuracy is much better than the models trained from limited personal data and is similar to, and even slightly better than, the results from a centralized dataset. This work paves the way for international collaborations on healthcare projects, where additional data is crucial for reducing bias and providing benefits to humanity.
Fast-Fading Channel and Power Optimization of the Magnetic Inductive Cellular Network
Jun 07, 2024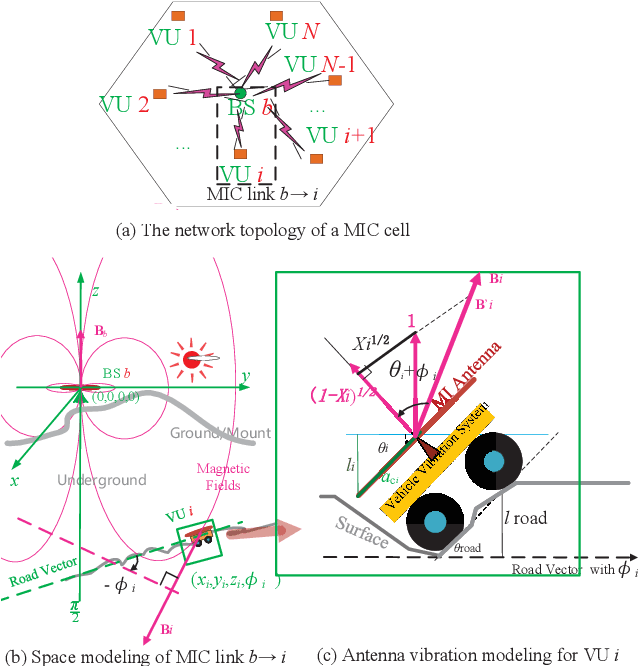
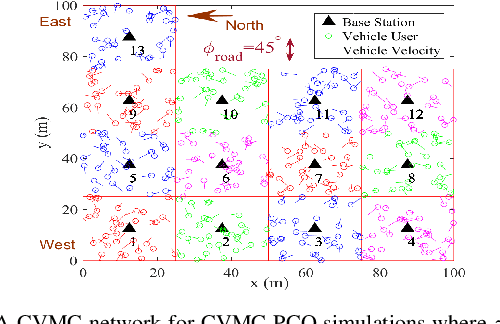
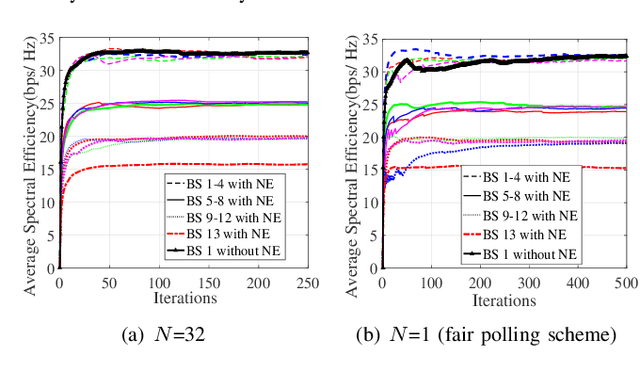
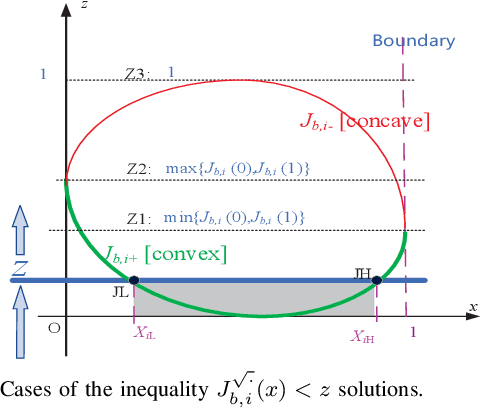
The cellular network of magnetic Induction (MI) communication holds promise in long-distance underground environments. In the traditional MI communication, there is no fast-fading channel since the MI channel is treated as a quasi-static channel. However, for the vehicle (mobile) MI (VMI) communication, the unpredictable antenna vibration brings the remarkable fast-fading. As such fast-fading cannot be modeled by the central limit theorem, it differs radically from other wireless fast-fading channels. Unfortunately, few studies focus on this phenomenon. In this paper, using a novel space modeling based on the electromagnetic field theorem, we propose a 3-dimension model of the VMI antenna vibration. By proposing ``conjugate pseudo-piecewise functions'' and boundary $p(x)$ distribution, we derive the cumulative distribution function (CDF), probability density function (PDF) and the expectation of the VMI fast-fading channel. We also theoretically analyze the effects of the VMI fast-fading on the network throughput, including the VMI outage probability which can be ignored in the traditional MI channel study. We draw several intriguing conclusions different from those in wireless fast-fading studies. For instance, the fast-fading brings more uniformly distributed channel coefficients. Finally, we propose the power control algorithm using the non-cooperative game and multiagent Q-learning methods to optimize the throughput of the cellular VMI network. Simulations validate the derivation and the proposed algorithm.
Dual-Segment Clustering Strategy for Federated Learning in Heterogeneous Environments
May 15, 2024Federated learning (FL) is a distributed machine learning paradigm with high efficiency and low communication load, only transmitting parameters or gradients of network. However, the non-independent and identically distributed (Non-IID) data characteristic has a negative impact on this paradigm. Furthermore, the heterogeneity of communication quality will significantly affect the accuracy of parameter transmission, causing a degradation in the performance of the FL system or even preventing its convergence. This letter proposes a dual-segment clustering (DSC) strategy, which first clusters the clients according to the heterogeneous communication conditions and then performs a second clustering by the sample size and label distribution, so as to solve the problem of data and communication heterogeneity. Experimental results show that the DSC strategy proposed in this letter can improve the convergence rate of FL, and has superiority on accuracy in a heterogeneous environment compared with the classical algorithm of cluster.
SNR Maximization and Localization for UAV-IRS-Assisted Near-Field Systems
Apr 24, 2024This letter introduces a novel unmanned aerial vehicle (UAV)-intelligent reflecting surface (IRS) structure into near-field localization systems to enhance the design flexibility of IRS, thereby obtaining additional performance gains. Specifically, a UAV-IRS is utilized to improve the harsh wireless environment and provide localization possibilities. To improve the localization accuracy, a joint optimization problem considering UAV position and UAV-IRS passive beamforming is formulated to maximize the receiving signal-to-noise ratio (SNR). An alternative optimization algorithm is proposed to solve the complex non-convex problem leveraging the projected gradient ascent (PGA) algorithm and the principle of minimizing the phase difference of the receiving signals. Closed-form expressions for UAV-IRS phase shift are derived to reduce the algorithm complexity. In the simulations, the proposed algorithm is compared with three different schemes and outperforms the others in both receiving SNR and localization accuracy.
Near-Field Localization and Phase Shift Optimization for RIS-Assisted Non-Ideal OFDM Systems
Dec 19, 2023



By incorporating reconfigurable intelligent surface (RIS) into communication-assisted localization systems, the issue of signal blockage caused by obstacles can be addressed, and passive beamforming can be employed to enhance localization accuracy. However, existing works mainly consider ideal channels and do not account for the effects of realistic impairments like carrier frequency offset (CFO) and phase noise (PN) on localization. This paper proposes an iterative joint estimation algorithm for CFO, PN, and user position based on maximum a posteriori (MAP) criterion and gradient descent (GD) algorithm. Closed-form expressions for CFO and PN updates are provided. The hybrid Cram\'{e}r-Rao lower bound (HCRLB) for the estimation parameters is derived, and the ambiguity in CFO and PN estimation is analyzed. To minimize the HCRLB, a non-convex RIS shift optimization problem is formulated and is transformed into a convex semidefinite programming (SDP) problem using the technique of semidefinite relaxation (SDR) and Schur complement. After optimizing the RIS phase shift, the theoretical positioning accuracy within the area of interest (AOI) can be improved by two orders of magnitude, with a maximum positioning root mean square error (RMSE) lower than $\rm 10^{-2}m$.
Blockchain-Based Federated Learning in Mobile Edge Networks with Application in Internet of Vehicles
Mar 01, 2021
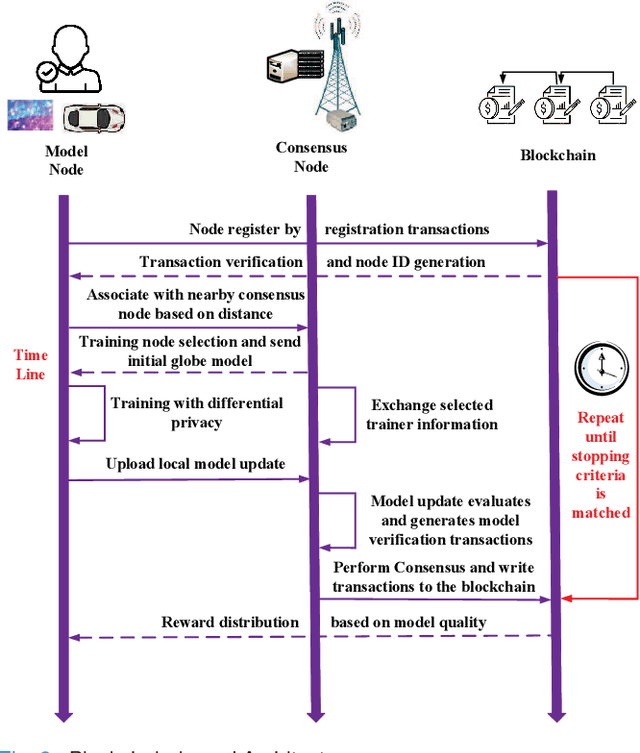
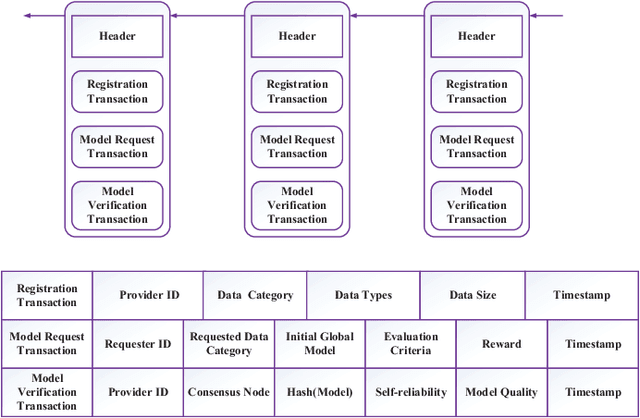

The rapid increase of the data scale in Internet of Vehicles (IoV) system paradigm, hews out new possibilities in boosting the service quality for the emerging applications through data sharing. Nevertheless, privacy concerns are major bottlenecks for data providers to share private data in traditional IoV networks. To this end, federated learning (FL) as an emerging learning paradigm, where data providers only send local model updates trained on their local raw data rather than upload any raw data, has been recently proposed to build a privacy-preserving data sharing models. Unfortunately, by analyzing on the differences of uploaded local model updates from data providers, private information can still be divulged, and performance of the system cannot be guaranteed when partial federated nodes executes malicious behavior. Additionally, traditional cloud-based FL poses challenges to the communication overhead with the rapid increase of terminal equipment in IoV system. All these issues inspire us to propose an autonomous blockchain empowered privacy-preserving FL framework in this paper, where the mobile edge computing (MEC) technology was naturally integrated in IoV system.
Passive Beamforming Design and Channel Estimation for IRS Communication System with Few-Bit ADCs
Feb 28, 2021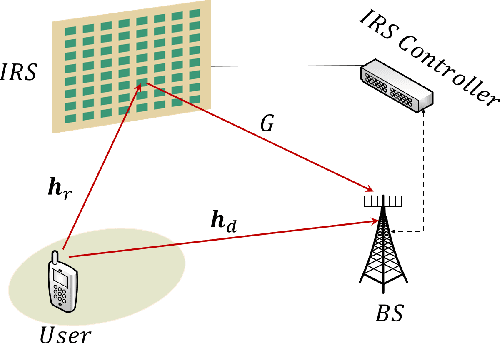
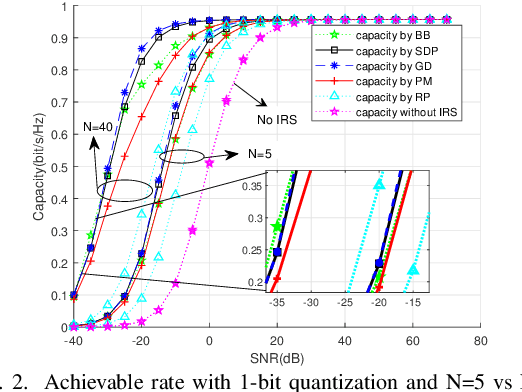
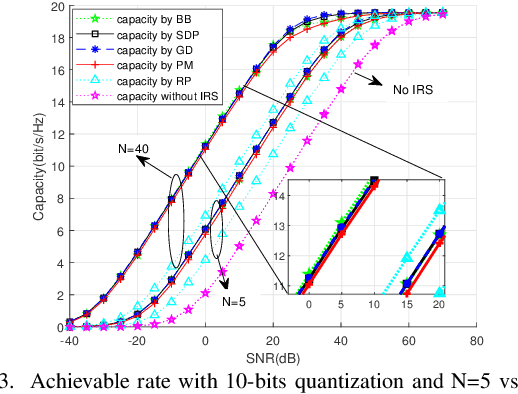
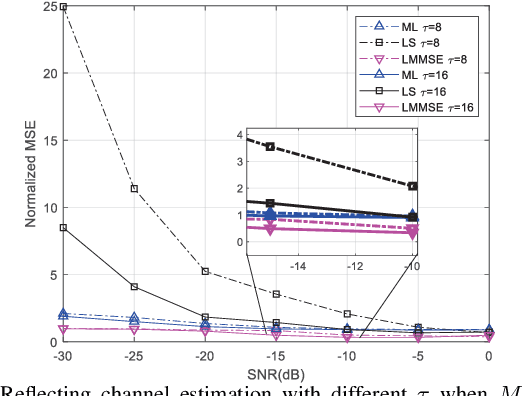
Utilizing intelligent reflecting surface (IRS) was proven to be efficient in improving the energy efficiency for wireless networks. In this paper, we investigate the passive beamforming and channel estimation for IRS assisted wireless communications with low-resolution analog-to-digital converters (ADCs) at the receiver. We derive the approximate achievable rate by using the Bussgang theorem. Based on the derived analytical achievable rate expression, we maximize the achievable rate by using semidefinite programming (SDP), branch-and-bound (BB), and gradient-based approaches. A maximum likelihood (ML) estimator is then proposed for channel estimation by considering the $\mathrm{1}$-bit quantization ADC. Numerical result shows that the proposed beamforming design and channel estimation method significantly outperforms the existing methods.