 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistilling Tiny and Ultra-fast Deep Neural Networks for Autonomous Navigation on Nano-UAVs
Jul 17, 2024Nano-sized unmanned aerial vehicles (UAVs) are ideal candidates for flying Internet-of-Things smart sensors to collect information in narrow spaces. This requires ultra-fast navigation under very tight memory/computation constraints. The PULP-Dronet convolutional neural network (CNN) enables autonomous navigation running aboard a nano-UAV at 19 frame/s, at the cost of a large memory footprint of 320 kB -- and with drone control in complex scenarios hindered by the disjoint training of collision avoidance and steering capabilities. In this work, we distill a novel family of CNNs with better capabilities than PULP-Dronet, but memory footprint reduced by up to 168x (down to 2.9 kB), achieving an inference rate of up to 139 frame/s; we collect a new open-source unified collision/steering 66 k images dataset for more robust navigation; and we perform a thorough in-field analysis of both PULP-Dronet and our tiny CNNs running on a commercially available nano-UAV. Our tiniest CNN, called Tiny-PULP-Dronet v3, navigates with a 100% success rate a challenging and never-seen-before path, composed of a narrow obstacle-populated corridor and a 180{\deg} turn, at a maximum target speed of 0.5 m/s. In the same scenario, the SoA PULP-Dronet consistently fails despite having 168x more parameters.
Tiny-PULP-Dronets: Squeezing Neural Networks for Faster and Lighter Inference on Multi-Tasking Autonomous Nano-Drones
Jul 02, 2024



Pocket-sized autonomous nano-drones can revolutionize many robotic use cases, such as visual inspection in narrow, constrained spaces, and ensure safer human-robot interaction due to their tiny form factor and weight -- i.e., tens of grams. This compelling vision is challenged by the high level of intelligence needed aboard, which clashes against the limited computational and storage resources available on PULP (parallel-ultra-low-power) MCU class navigation and mission controllers that can be hosted aboard. This work moves from PULP-Dronet, a State-of-the-Art convolutional neural network for autonomous navigation on nano-drones. We introduce Tiny-PULP-Dronet: a novel methodology to squeeze by more than one order of magnitude model size (50x fewer parameters), and number of operations (27x less multiply-and-accumulate) required to run inference with similar flight performance as PULP-Dronet. This massive reduction paves the way towards affordable multi-tasking on nano-drones, a fundamental requirement for achieving high-level intelligence.
Remote ID for separation provision and multi-agent navigation
Sep 02, 2023



In this paper, we investigate the integration of drone identification data (Remote ID) with collision avoidance mechanisms to improve the safety and efficiency of multi-drone operations. We introduce an improved Near Mid-Air Collision (NMAC) definition, termed as UAV NMAC (uNMAC), which accounts for uncertainties in the drone's location due to self-localization errors and possible displacements between two location reports. Our proposed uNMAC-based Reciprocal Velocity Obstacle (RVO) model integrates Remote ID messages with RVO to enable enhanced collision-free navigation. We propose modifications to the Remote ID format to include data on localization accuracy and drone airframe size, facilitating more efficient collision avoidance decisions. Through extensive simulations, we demonstrate that our approach halves mission execution times compared to a conservative standard Remote ID-based RVO. Importantly, it ensures collision-free operations even under localization uncertainties. By integrating the improved Remote ID messages and uNMAC-based RVO, we offer a solution to significantly increase airspace capacity while adhering to strict safety standards. Our study emphasizes the potential to augment the safety and efficiency of future drone operations, thereby benefiting industries reliant on drone technologies.
Deep Reinforcement Learning for Combined Coverage and Resource Allocation in UAV-aided RAN-slicing
Nov 15, 2022Network slicing is a well assessed approach enabling virtualization of the mobile core and radio access network (RAN) in the emerging 5th Generation New Radio. Slicing is of paramount importance when dealing with the emerging and diverse vertical applications entailing heterogeneous sets of requirements. 5G is also envisioning Unmanned Aerial Vehicles (UAVs) to be a key element in the cellular network standard, aiming at their use as aerial base stations and exploiting their flexible and quick deployment to enhance the wireless network performance. This work presents a UAV-assisted 5G network, where the aerial base stations (UAV-BS) are empowered with network slicing capabilities aiming at optimizing the Service Level Agreement (SLA) satisfaction ratio of a set of users. The users belong to three heterogeneous categories of 5G service type, namely, enhanced mobile broadband (eMBB), ultra-reliable low-latency communication (URLLC), and massive machine-type communication (mMTC). A first application of multi-agent and multi-decision deep reinforcement learning for UAV-BS in a network slicing context is introduced, aiming at the optimization of the SLA satisfaction ratio of users through the joint allocation of radio resources to slices and refinement of the UAV-BSs 2-dimensional trajectories. The performance of the presented strategy have been tested and compared to benchmark heuristics, highlighting a higher percentage of satisfied users (at least 27% more) in a variety of scenarios.
Signal-based self-organization of a chain of UAVs for subterranean exploration
Mar 09, 2020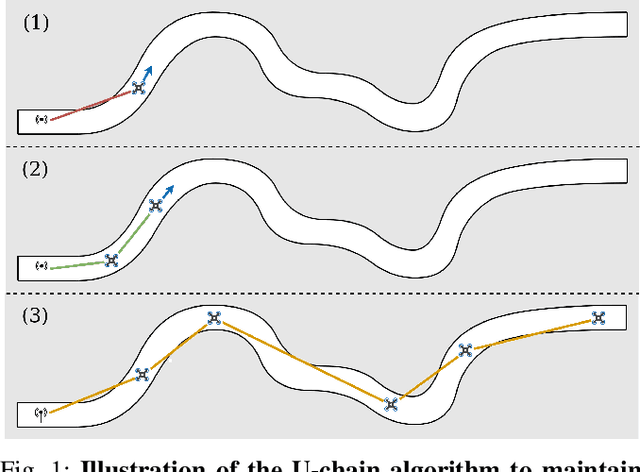
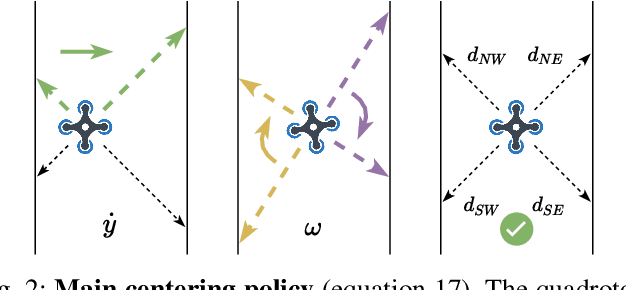
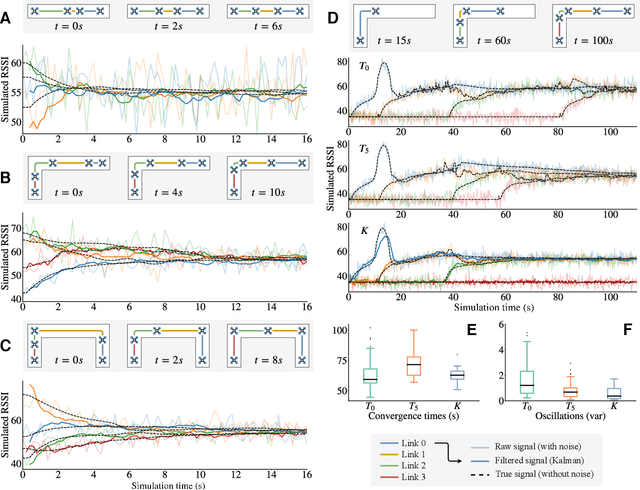
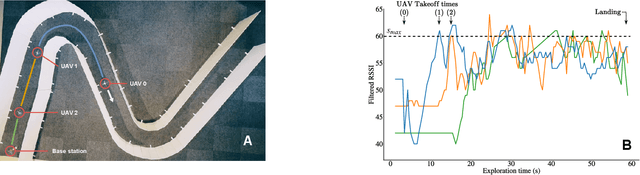
Miniature multi-rotors are promising robots for navigating subterranean networks, but maintaining a radio connection underground is challenging. In this paper, we introduce a distributed algorithm, called U-Chain (for Underground-chain), that coordinates a chain of flying robots between an exploration drone and an operator. Our algorithm only uses the measurement of the signal quality between two successive robots as well as an estimate of the ground speed based on an optic flow sensor. We evaluate our approach formally and in simulation, and we describe experimental results with a chain of 3 real miniature quadrotors (12 by 12 cm) and a base station.
Relative Pose Based Redundancy Removal: Collaborative RGB-D Data Transmission in Mobile Visual Sensor Networks
Feb 27, 2018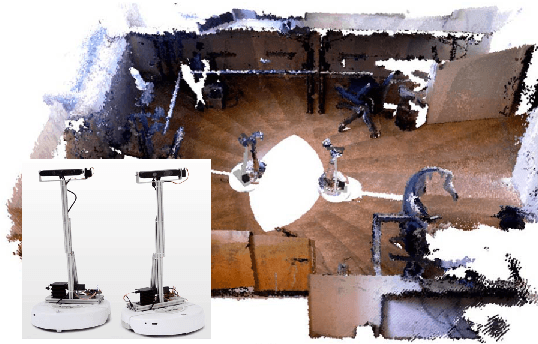
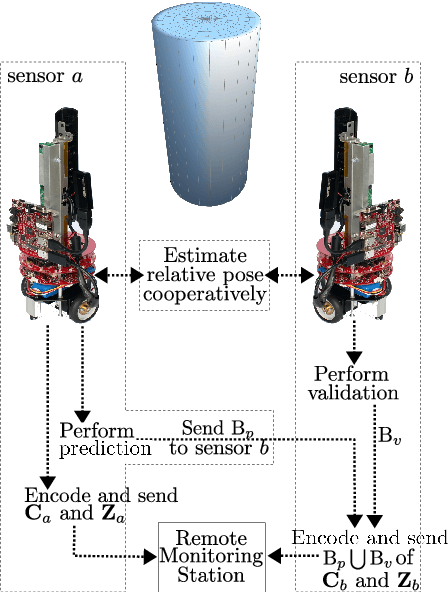
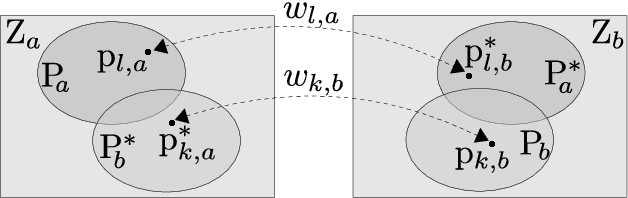
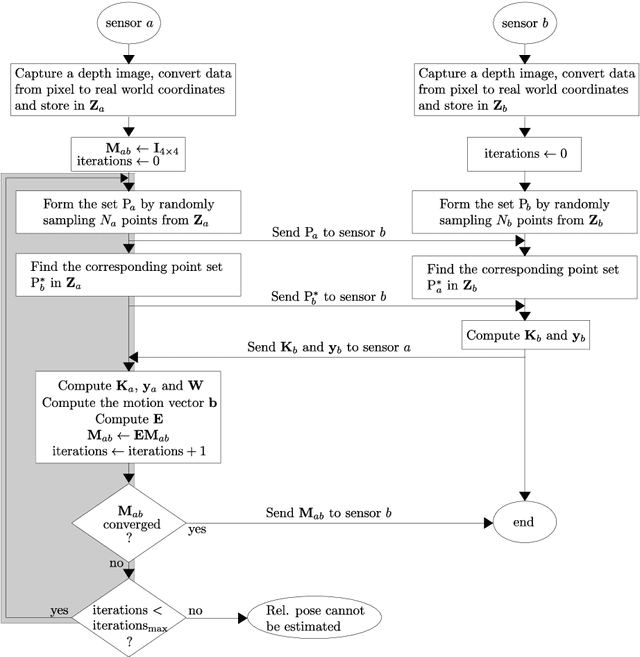
The Relative Pose based Redundancy Removal(RPRR) scheme is presented, which has been designed for mobile RGB-D sensor networks operating under bandwidth-constrained operational scenarios. Participating sensor nodes detect the redundant visual and depth information to prevent their transmission leading to a significant improvement in wireless channel usage efficiency and power savings. Experimental results show that wireless channel utilization is improved by 250% and battery consumption is halved when the RPRR scheme is used instead of sending the sensor images independently.