 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCASH: Context-Aware Smart Handover for Reliable UAV Connectivity on Aerial Corridors
Aug 05, 2025



Urban Air Mobility (UAM) envisions aerial corridors for Unmanned Aerial Vehicles (UAVs) to reduce ground traffic congestion by supporting 3D mobility, such as air taxis. A key challenge in these high-mobility aerial corridors is ensuring reliable connectivity, where frequent handovers can degrade network performance. To resolve this, we present a Context-Aware Smart Handover (CASH) protocol that uses a forward-looking scoring mechanism based on UAV trajectory to make proactive handover decisions. We evaluate the performance of the proposed CASH against existing handover protocols in a custom-built simulator. Results show that CASH reduces handover frequency by up to 78% while maintaining low outage probability. We then investigate the impact of base station density and safety margin on handover performance, where their optimal setups are empirically obtained to ensure reliable UAM communication.
Effect of realistic oscillator phase noise on the performance of cell-free networks
May 07, 2024To keep supporting 6G requirements, the radio access infrastructure will increasingly densify. Cell-free (CF) networks offer extreme flexibility by coherently serving users with multiple Access points (APs). This paradigm requires precise and stable phase synchronization. In this article, we adapt the standardized 5G NR setup (subcarrier spacing, OFDM symbol duration and allocation) to investigate the effect of Phase Noise (PN) on the simulated performance of scalable CF networks. In contrast to the prior literature relying on the simplified model of a free-running oscillator with the Wiener process, we deploy a realistic hardware-inspired phase noise model reproducing the Local Oscillator (LO) phase drift. Our results demonstrate that even affordable LOs offer sufficient stability to ensure negligible loss of uplink Spectral Efficiency (SE) on the time scale of the standardized 5G Transmission Time Interval of 1 ms. This study substantiates the feasibility of CF networks based on 5G standards.
3D Non-Stationary Channel Measurement and Analysis for MaMIMO-UAV Communications
Oct 10, 2023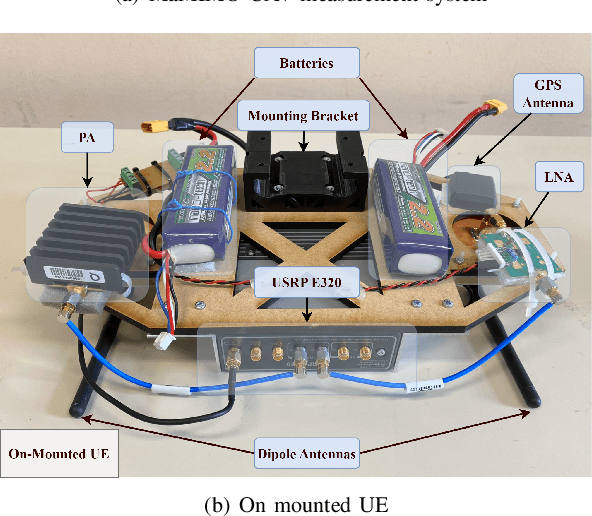


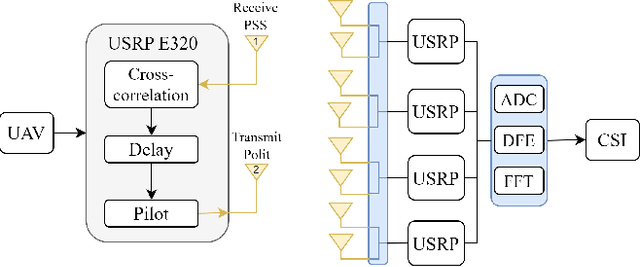
Unmanned aerial vehicles (UAVs) have gained popularity in the communications research community because of their versatility in placement and potential to extend the functions of communication networks. However, there remains still a gap in existing works regarding detailed and measurement-verified air-to-ground (A2G) Massive Multi-Input Multi-Output (MaMIMO) channel characteristics which play an important role in realistic deployment. In this paper, we first design a UAV MaMIMO communication platform for channel acquisition. We then use the testbed to measure uplink Channel State Information (CSI) between a rotary-wing drone and a 64-element MaMIMO base station (BS). For characterization, we focus on multidimensional channel stationarity which is a fundamental metric in communication systems. Afterward, we present measurement results and analyze the channel statistics based on power delay profiles (PDPs) considering space, time, and frequency domains. We propose the stationary angle (SA) as a supplementary metric of stationary distance (SD) in the time domain. We analyze the coherence bandwidth and RMS delay spread for frequency stationarity. Finally, spatial correlations between elements are analyzed to indicate the spatial stationarity of the array. The space-time-frequency channel stationary characterization will benefit the physical layer design of MaMIMO-UAV communications.
Remote ID for separation provision and multi-agent navigation
Sep 02, 2023



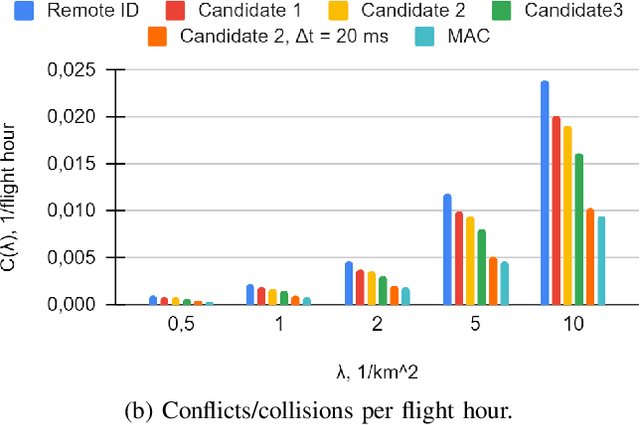
In this paper, we investigate the integration of drone identification data (Remote ID) with collision avoidance mechanisms to improve the safety and efficiency of multi-drone operations. We introduce an improved Near Mid-Air Collision (NMAC) definition, termed as UAV NMAC (uNMAC), which accounts for uncertainties in the drone's location due to self-localization errors and possible displacements between two location reports. Our proposed uNMAC-based Reciprocal Velocity Obstacle (RVO) model integrates Remote ID messages with RVO to enable enhanced collision-free navigation. We propose modifications to the Remote ID format to include data on localization accuracy and drone airframe size, facilitating more efficient collision avoidance decisions. Through extensive simulations, we demonstrate that our approach halves mission execution times compared to a conservative standard Remote ID-based RVO. Importantly, it ensures collision-free operations even under localization uncertainties. By integrating the improved Remote ID messages and uNMAC-based RVO, we offer a solution to significantly increase airspace capacity while adhering to strict safety standards. Our study emphasizes the potential to augment the safety and efficiency of future drone operations, thereby benefiting industries reliant on drone technologies.
Cell-free mMIMO Support in the O-RAN Architecture: A PHY Layer Perspective for 5G and Beyond Networks
Jan 25, 2023



To keep supporting next-generation requirements, the radio access infrastructure will increasingly densify. Cell-free (CF) network architectures are emerging, combining dense deployments with extreme flexibility in allocating resources to users. In parallel, the Open Radio Access Networks (O-RAN) paradigm is transforming RAN towards an open, intelligent, virtualized, and fully interoperable architecture. This paradigm brings the needed flexibility and intelligent control opportunities for CF networking. In this paper, we document the current O-RAN terminology and contrast it with some common CF processing approaches. We then discuss the main O-RAN innovations and research challenges that remain to be solved.
Reducing safe UAV separation distances with U2U communication and new Remote ID formats
Sep 27, 2022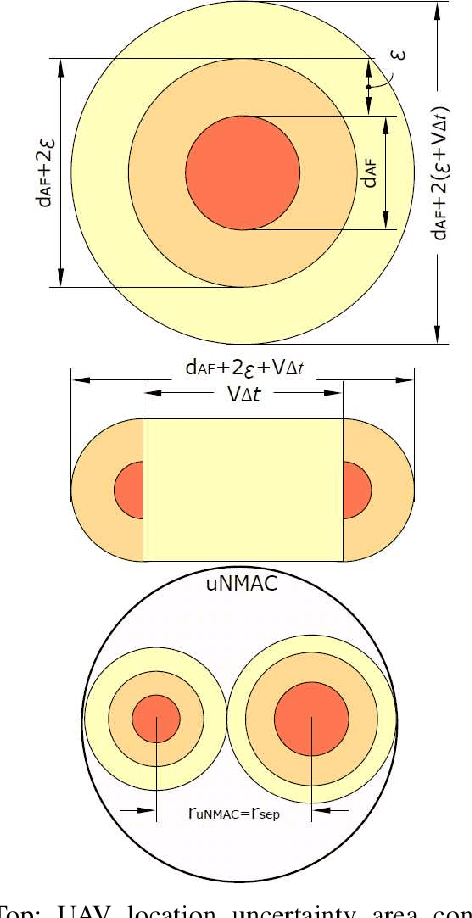
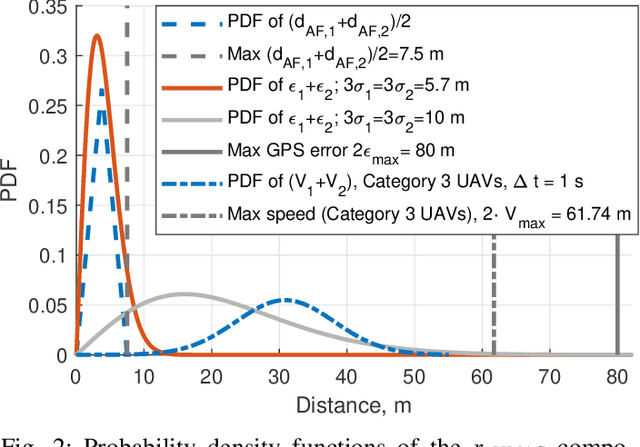
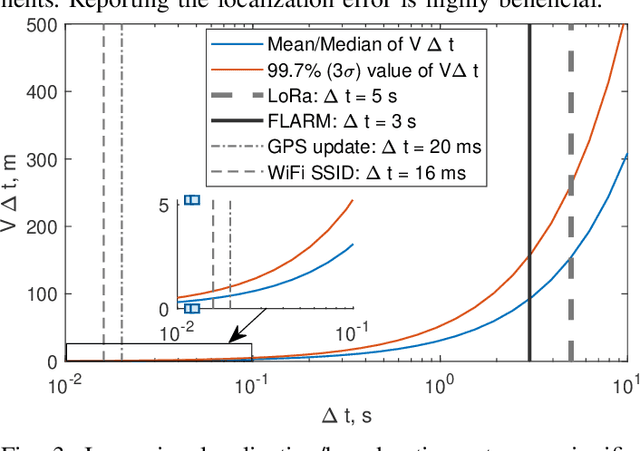
As the number of Unmanned Aerial Vehicles (UAVs) in the airspace grows, ensuring that the aircraft do not collide becomes vital for further technology development. In this work, we propose a new UAV Near Mid-Air collision (uNMAC) safety volume taking into account i) Airframe size, ii) Localization precision, iii) UAV speed/velocity, and iv) wireless technology capabilities. Based on uNMAC, we demonstrate that inter-UAV separation distances can be reduced by using UAV-to-UAV (U2U) communication while the safety levels remain unchanged. Moreover, this work shows that next-generation Remote ID messages should contain additional information (i.e., estimated localization error and, for some applications, movement direction). As frequent broadcasting of Remote ID can further reduce the separation distances, we identified 5G NR Sidelink, Wi-Fi, and Bluetooth as suitable candidates for U2U communication.
Drone technology: interdisciplinary systematic assessment of knowledge gaps and potential solutions
Oct 14, 2021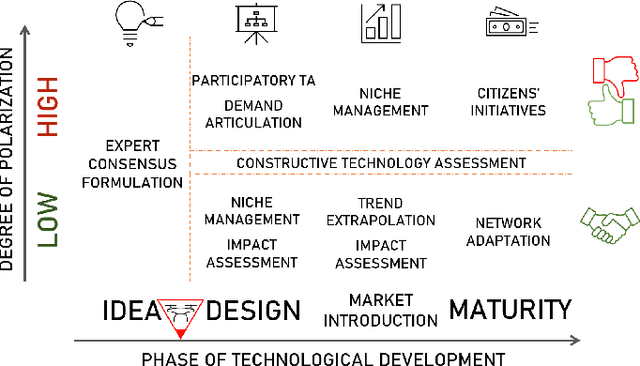
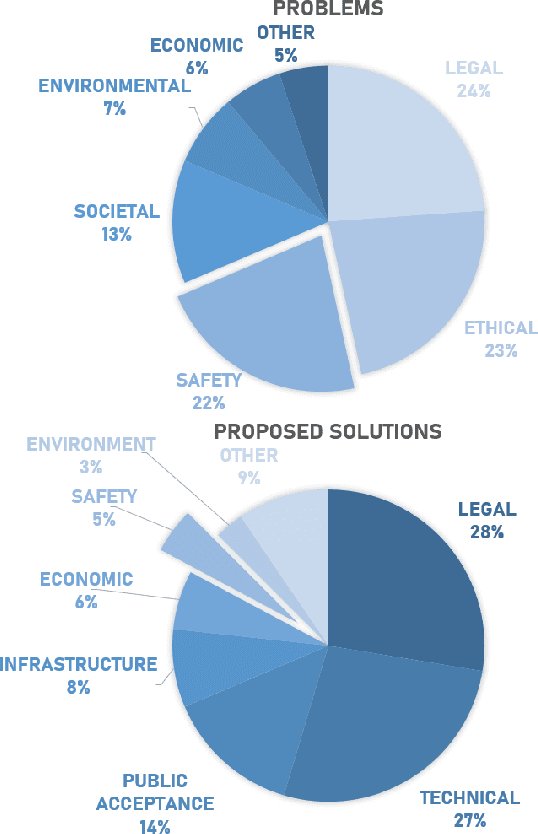
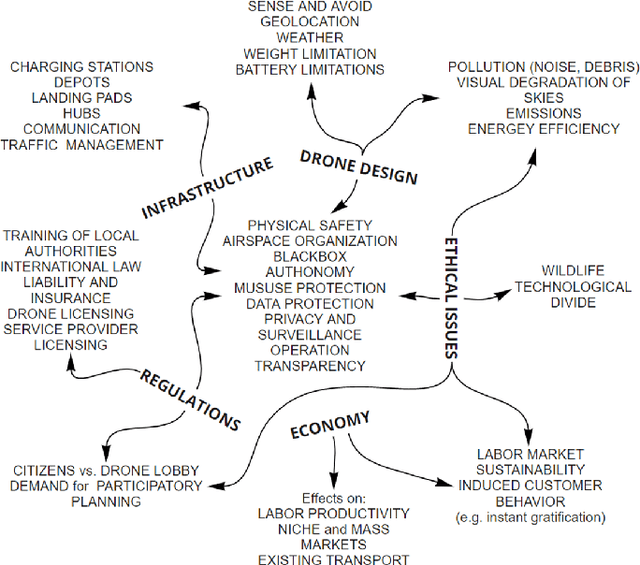
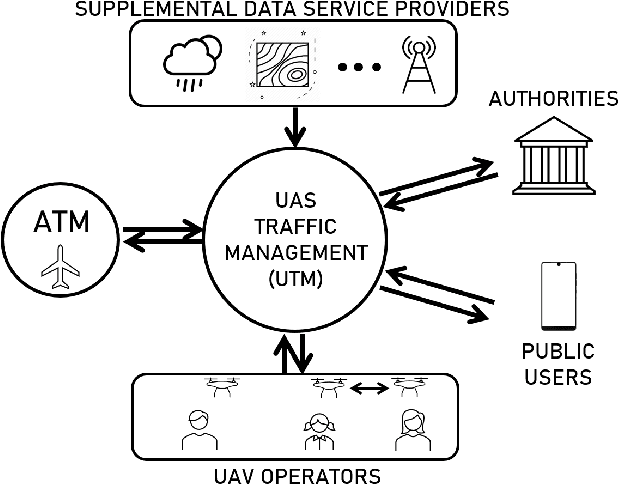
Despite being a hot research topic for a decade, drones are still not part of our everyday life. In this article, we analyze the reasons for this state of affairs and look for ways of improving the situation. We rely on the achievements of the so-called Technology Assessment (TA), an interdisciplinary research field aiming at providing knowledge for better-informed and well-reflected decisions concerning new technologies. We demonstrate that the most critical area requiring further development is safety. Since Unmanned Aerial System Traffic Management (UTM) systems promise to address this problem in a systematic manner, we also indicate relevant solutions for UTM that have to be designed by wireless experts. Moreover, we suggest project implementation guidelines for several drone applications. The guidelines take into account the public acceptance levels estimated in state of the art literature of the correspondent field.
Avoiding normalization uncertainties in deep learning architectures for end-to-end communication
Jul 16, 2021
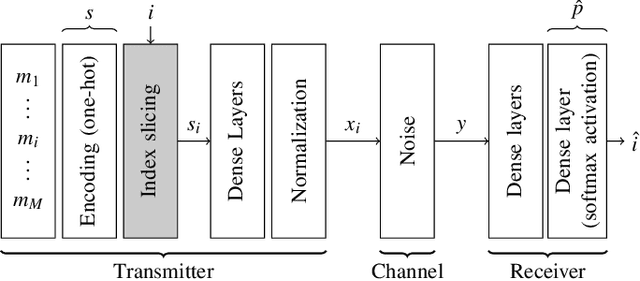
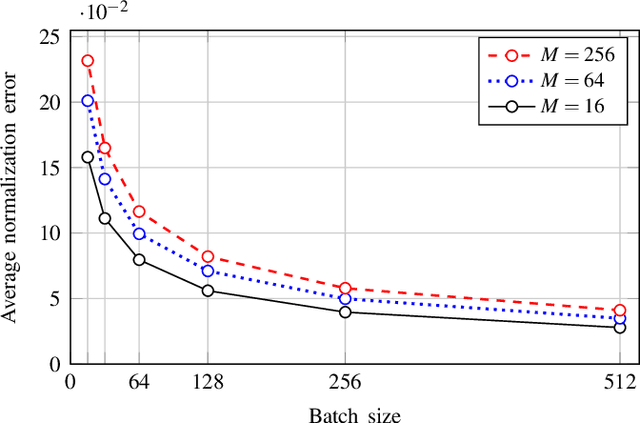
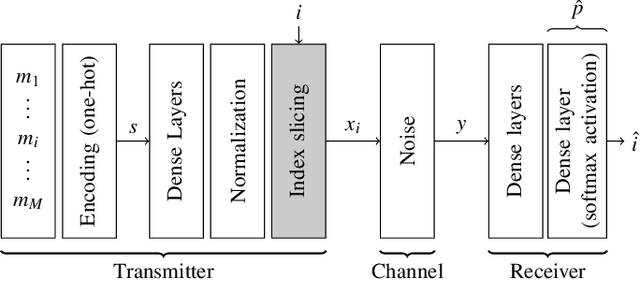
Recently, deep learning is considered to optimize the end-to-end performance of digital communication systems. The promise of learning a digital communication scheme from data is attractive, since this makes the scheme adaptable and precisely tunable to many scenarios and channel models. In this paper, we analyse a widely used neural network architecture and show that the training of the end-to-end architecture suffers from normalization errors introduced by an average power constraint. To solve this issue, we propose a modified architecture: shifting the batch slicing after the normalization layer. This approach meets the normalization constraints better, especially in the case of small batch sizes. Finally, we experimentally demonstrate that our modified architecture leads to significantly improved performance of trained models, even for large batch sizes where normalization constraints are more easily met.
Edge Computing Assisted Autonomous Flight for UAV: Synergies between Vision and Communications
Dec 10, 2020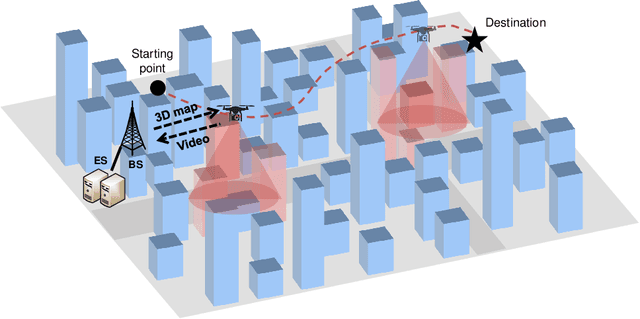
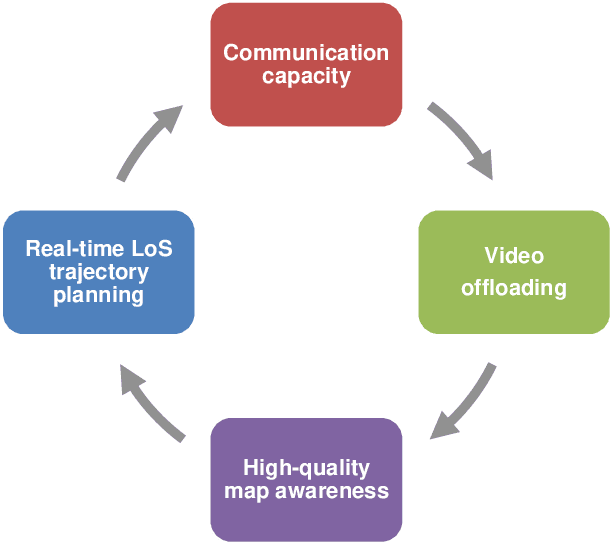
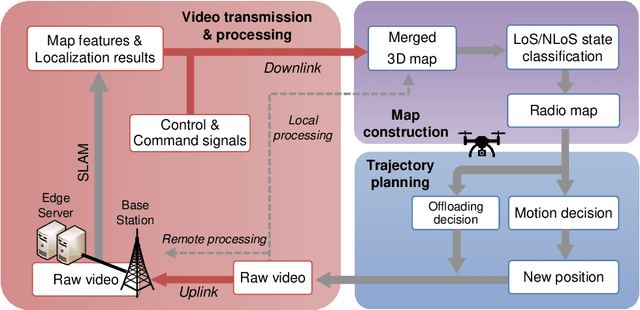
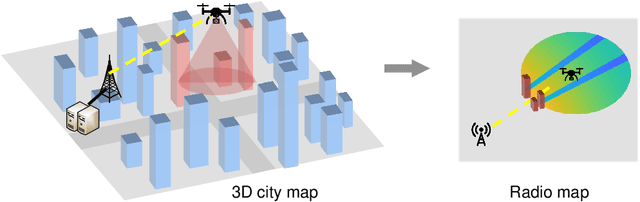
Autonomous flight for UAVs relies on visual information for avoiding obstacles and ensuring a safe collision-free flight. In addition to visual clues, safe UAVs often need connectivity with the ground station. In this paper, we study the synergies between vision and communications for edge computing-enabled UAV flight. By proposing a framework of Edge Computing Assisted Autonomous Flight (ECAAF), we illustrate that vision and communications can interact with and assist each other with the aid of edge computing and offloading, and further speed up the UAV mission completion. ECAAF consists of three functionalities that are discussed in detail: edge computing for 3D map acquisition, radio map construction from the 3D map, and online trajectory planning. During ECAAF, the interactions of communication capacity, video offloading, 3D map quality, and channel state of the trajectory form a positive feedback loop. Simulation results verify that the proposed method can improve mission performance by enhancing connectivity. Finally, we conclude with some future research directions.