 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemote ID for separation provision and multi-agent navigation
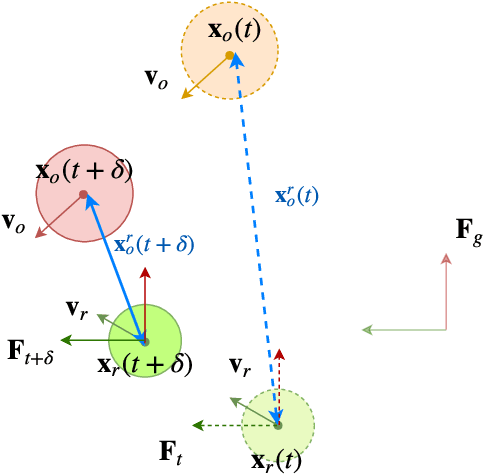
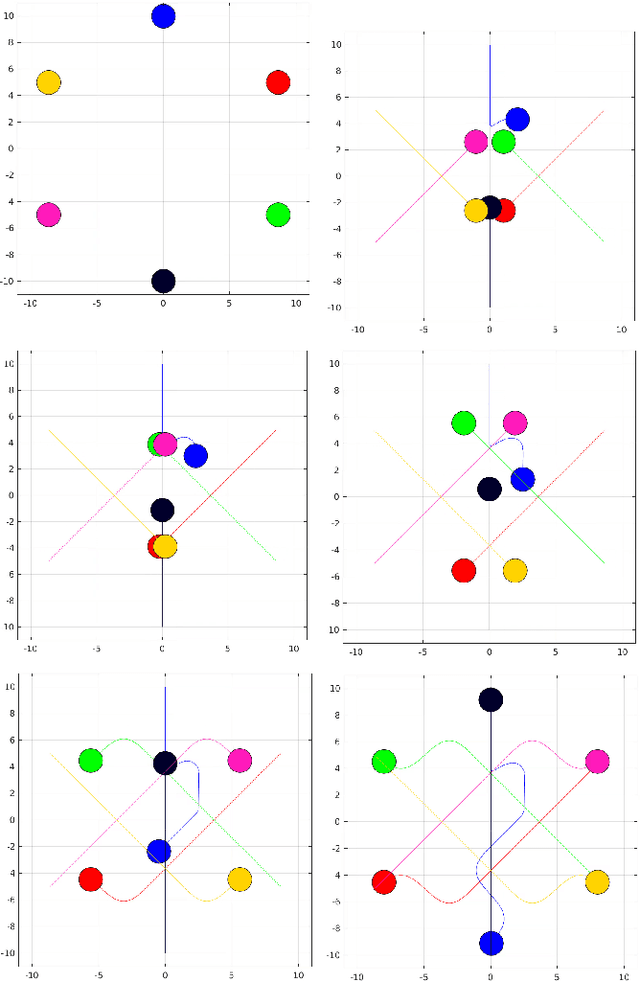
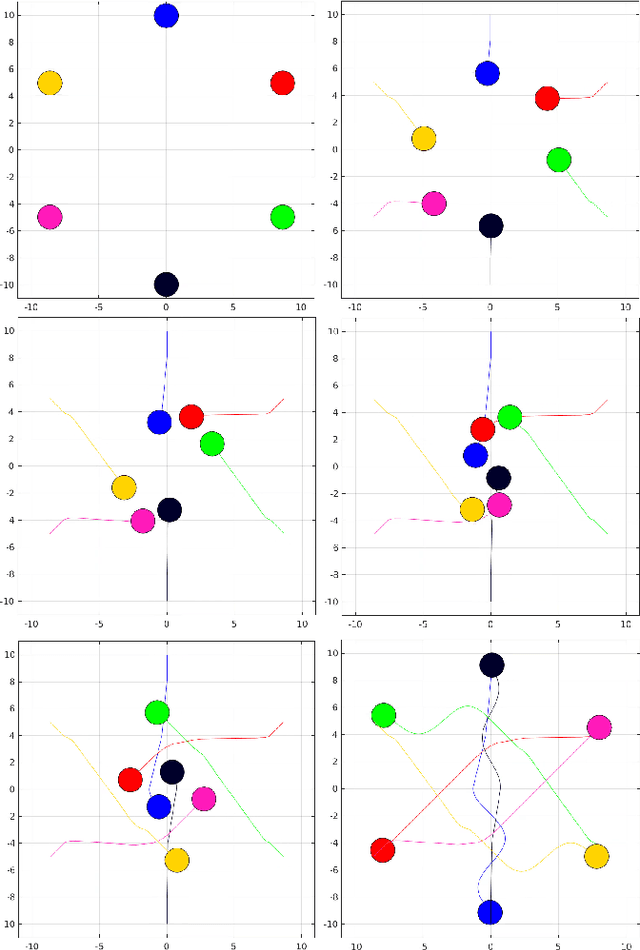
Sep 02, 2023In this paper, we investigate the integration of drone identification data (Remote ID) with collision avoidance mechanisms to improve the safety and efficiency of multi-drone operations. We introduce an improved Near Mid-Air Collision (NMAC) definition, termed as UAV NMAC (uNMAC), which accounts for uncertainties in the drone's location due to self-localization errors and possible displacements between two location reports. Our proposed uNMAC-based Reciprocal Velocity Obstacle (RVO) model integrates Remote ID messages with RVO to enable enhanced collision-free navigation. We propose modifications to the Remote ID format to include data on localization accuracy and drone airframe size, facilitating more efficient collision avoidance decisions. Through extensive simulations, we demonstrate that our approach halves mission execution times compared to a conservative standard Remote ID-based RVO. Importantly, it ensures collision-free operations even under localization uncertainties. By integrating the improved Remote ID messages and uNMAC-based RVO, we offer a solution to significantly increase airspace capacity while adhering to strict safety standards. Our study emphasizes the potential to augment the safety and efficiency of future drone operations, thereby benefiting industries reliant on drone technologies.
SROM: Simple Real-time Odometry and Mapping using LiDAR data for Autonomous Vehicles
May 07, 2020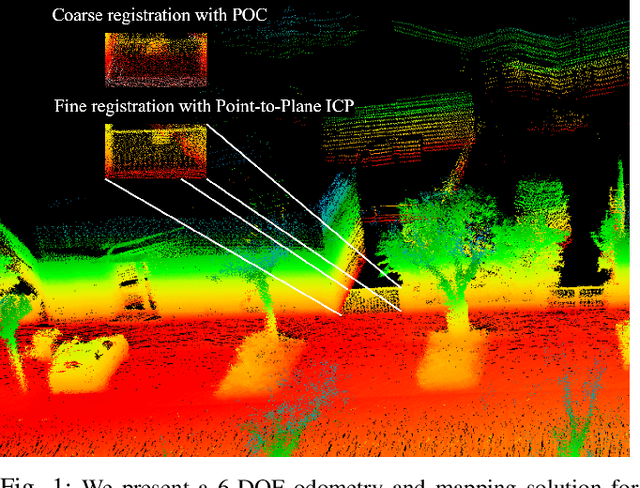
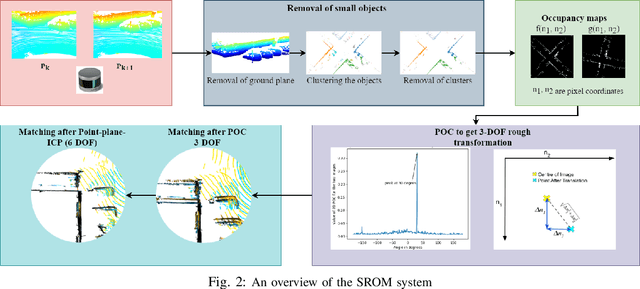
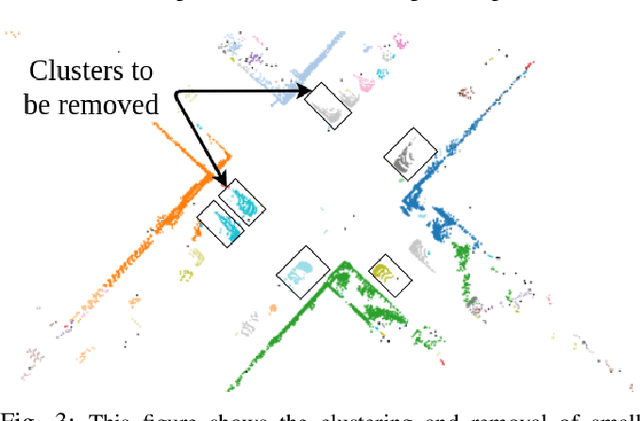
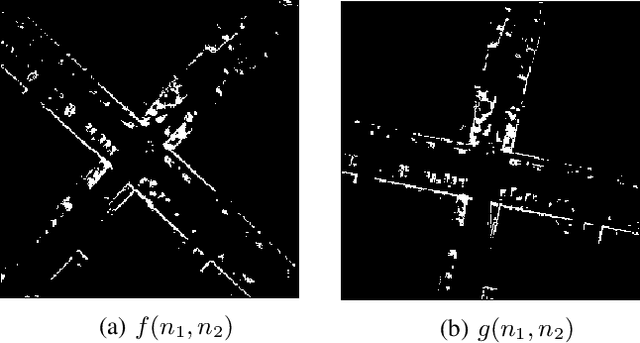
In this paper, we present SROM, a novel real-time Simultaneous Localization and Mapping (SLAM) system for autonomous vehicles. The keynote of the paper showcases SROM's ability to maintain localization at low sampling rates or at high linear or angular velocities where most popular LiDAR based localization approaches get degraded fast. We also demonstrate SROM to be computationally efficient and capable of handling high-speed maneuvers. It also achieves low drifts without the need for any other sensors like IMU and/or GPS. Our method has a two-layer structure wherein first, an approximate estimate of the rotation angle and translation parameters are calculated using a Phase Only Correlation (POC) method. Next, we use this estimate as an initialization for a point-to-plane ICP algorithm to obtain fine matching and registration. Another key feature of the proposed algorithm is the removal of dynamic objects before matching the scans. This improves the performance of our system as the dynamic objects can corrupt the matching scheme and derail localization. Our SLAM system can build reliable maps at the same time generating high-quality odometry. We exhaustively evaluated the proposed method in many challenging highways/country/urban sequences from the KITTI dataset and the results demonstrate better accuracy in comparisons to other state-of-the-art methods with reduced computational expense aiding in real-time realizations. We have also integrated our SROM system with our in-house autonomous vehicle and compared it with the state-of-the-art methods like LOAM and LeGO-LOAM.
Reactive Navigation under Non-Parametric Uncertainty through Hilbert Space Embedding of Probabilistic Velocity Obstacles
Jan 21, 2020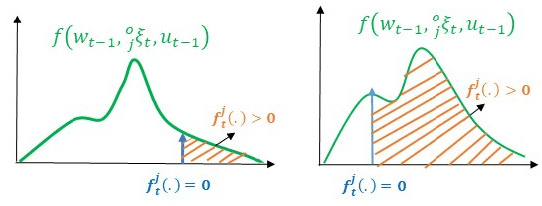
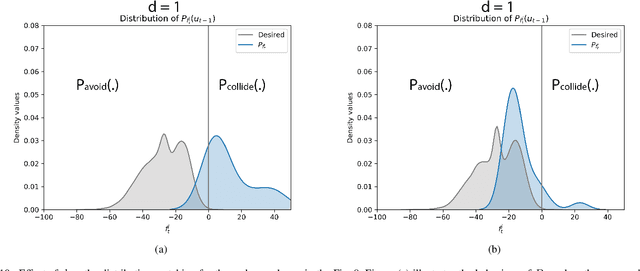
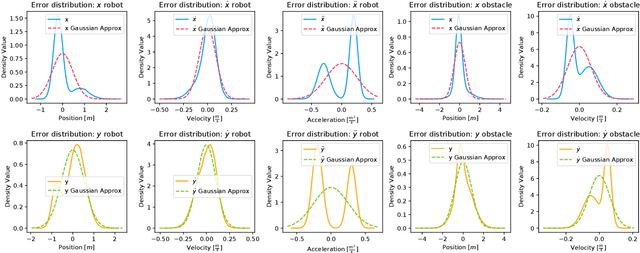
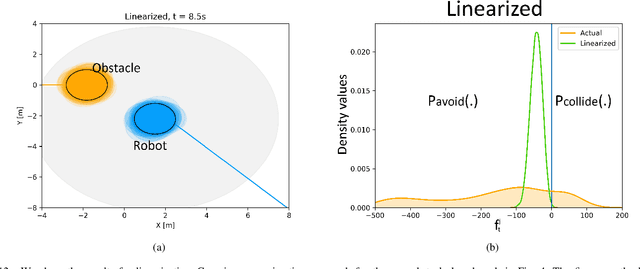
The probabilistic velocity obstacle (PVO) extends the concept of velocity obstacle (VO) to work in uncertain dynamic environments. In this paper, we show how a robust model predictive control (MPC) with PVO constraints under non-parametric uncertainty can be made computationally tractable. At the core of our formulation is a novel yet simple interpretation of our robust MPC as a problem of matching the distribution of PVO with a certain desired distribution. To this end, we propose two methods. Our first baseline method is based on approximating the distribution of PVO with a Gaussian Mixture Model (GMM) and subsequently performing distribution matching using Kullback Leibler (KL) divergence metric. Our second formulation is based on the possibility of representing arbitrary distributions as functions in Reproducing Kernel Hilbert Space (RKHS). We use this foundation to interpret our robust MPC as a problem of minimizing the distance between the desired distribution and the distribution of the PVO in the RKHS. Both the RKHS and GMM based formulation can work with any uncertainty distribution and thus allowing us to relax the prevalent Gaussian assumption in the existing works. We validate our formulation by taking an example of 2D navigation of quadrotors with a realistic noise model for perception and ego-motion uncertainty. In particular, we present a systematic comparison between the GMM and the RKHS approach and show that while both approaches can produce safe trajectories, the former is highly conservative and leads to poor tracking and control costs. Furthermore, RKHS based approach gives better computational times that are up to one order of magnitude lesser than the computation time of the GMM based approach.
IVO: Inverse Velocity Obstacles for Real Time Navigation
May 04, 2019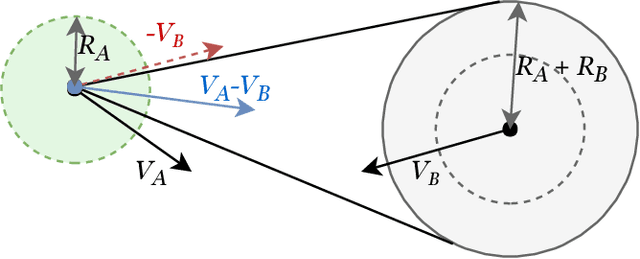
In this paper, we present "IVO: Inverse Velocity Obstacles" an ego-centric framework that improves the real time implementation. The proposed method stems from the concept of velocity obstacle and can be applied for both single agent and multi-agent system. It focuses on computing collision free maneuvers without any knowledge or assumption on the pose and the velocity of the robot. This is primarily achieved by reformulating the velocity obstacle to adapt to an ego-centric framework. This is a significant step towards improving real time implementations of collision avoidance in dynamic environments as there is no dependency on state estimation techniques to infer the robot pose and velocity. We evaluate IVO for both single agent and multi-agent in different scenarios and show it's efficacy over the existing formulations. We also show the real time scalability of the proposed methodology.
Gradient Aware - Shrinking Domain based Control Design for Reactive Planning Frameworks used in Autonomous Vehicles
Apr 23, 2018

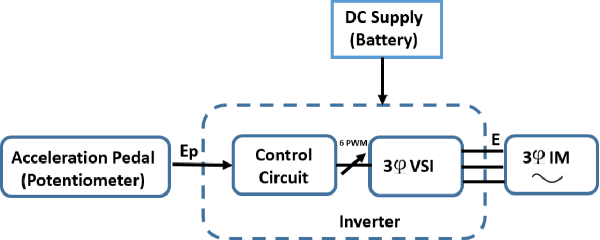
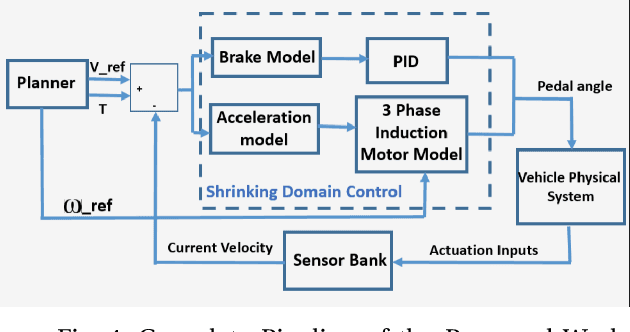
In this paper, we present a novel control law for longitudinal speed control of autonomous vehicles. The key contributions of the proposed work include the design of a control law that reactively integrates the longitudinal surface gradient of road into its operation. In contrast to the existing works, we found that integrating the path gradient into the control framework improves the speed tracking efficacy. Since the control law is implemented over a shrinking domain scheme, it minimizes the integrated error by recomputing the control inputs at every discretized step and consequently provides less reaction time. This makes our control law suitable for motion planning frameworks that are operating at high frequencies. Furthermore, our work is implemented using a generalized vehicle model and can be easily extended to other classes of vehicles. The performance of gradient aware-shrinking domain based controller is implemented and tested on a stock electric vehicle on which a number of sensors are mounted. Results from the tests show the robustness of our control law for speed tracking on a terrain with varying gradient while also considering stringent time constraints imposed by the planning framework.