 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Bird Reconstruction: a Dataset, Model, and Shape Recovery from a Single View
Aug 13, 2020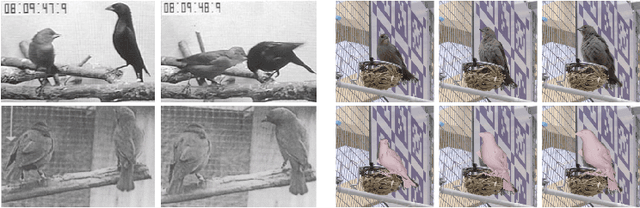



Automated capture of animal pose is transforming how we study neuroscience and social behavior. Movements carry important social cues, but current methods are not able to robustly estimate pose and shape of animals, particularly for social animals such as birds, which are often occluded by each other and objects in the environment. To address this problem, we first introduce a model and multi-view optimization approach, which we use to capture the unique shape and pose space displayed by live birds. We then introduce a pipeline and experiments for keypoint, mask, pose, and shape regression that recovers accurate avian postures from single views. Finally, we provide extensive multi-view keypoint and mask annotations collected from a group of 15 social birds housed together in an outdoor aviary. The project website with videos, results, code, mesh model, and the Penn Aviary Dataset can be found at https://marcbadger.github.io/avian-mesh.
Gradient Aware - Shrinking Domain based Control Design for Reactive Planning Frameworks used in Autonomous Vehicles
Apr 23, 2018

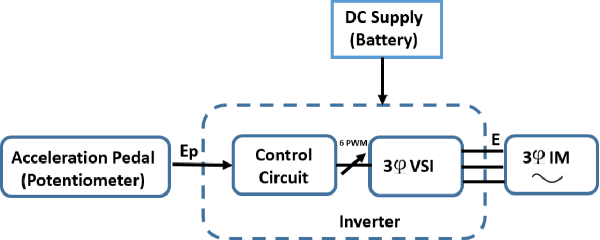
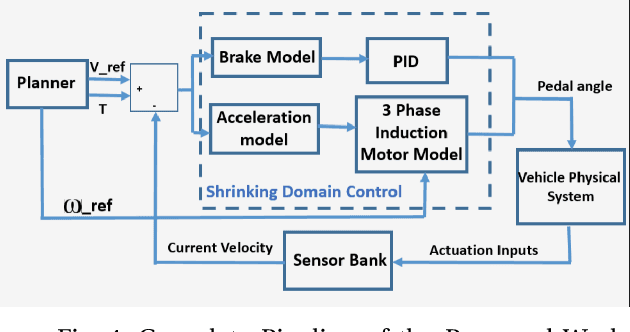
In this paper, we present a novel control law for longitudinal speed control of autonomous vehicles. The key contributions of the proposed work include the design of a control law that reactively integrates the longitudinal surface gradient of road into its operation. In contrast to the existing works, we found that integrating the path gradient into the control framework improves the speed tracking efficacy. Since the control law is implemented over a shrinking domain scheme, it minimizes the integrated error by recomputing the control inputs at every discretized step and consequently provides less reaction time. This makes our control law suitable for motion planning frameworks that are operating at high frequencies. Furthermore, our work is implemented using a generalized vehicle model and can be easily extended to other classes of vehicles. The performance of gradient aware-shrinking domain based controller is implemented and tested on a stock electric vehicle on which a number of sensors are mounted. Results from the tests show the robustness of our control law for speed tracking on a terrain with varying gradient while also considering stringent time constraints imposed by the planning framework.