 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePosition: Enough of Scaling LLMs! Lets Focus on Downscaling
May 05, 2025We challenge the dominant focus on neural scaling laws and advocate for a paradigm shift toward downscaling in the development of large language models (LLMs). While scaling laws have provided critical insights into performance improvements through increasing model and dataset size, we emphasize the significant limitations of this approach, particularly in terms of computational inefficiency, environmental impact, and deployment constraints. To address these challenges, we propose a holistic framework for downscaling LLMs that seeks to maintain performance while drastically reducing resource demands. This paper outlines practical strategies for transitioning away from traditional scaling paradigms, advocating for a more sustainable, efficient, and accessible approach to LLM development.
How to Upscale Neural Networks with Scaling Law? A Survey and Practical Guidelines
Feb 17, 2025



Neural scaling laws have revolutionized the design and optimization of large-scale AI models by revealing predictable relationships between model size, dataset volume, and computational resources. Early research established power-law relationships in model performance, leading to compute-optimal scaling strategies. However, recent studies highlighted their limitations across architectures, modalities, and deployment contexts. Sparse models, mixture-of-experts, retrieval-augmented learning, and multimodal models often deviate from traditional scaling patterns. Moreover, scaling behaviors vary across domains such as vision, reinforcement learning, and fine-tuning, underscoring the need for more nuanced approaches. In this survey, we synthesize insights from over 50 studies, examining the theoretical foundations, empirical findings, and practical implications of scaling laws. We also explore key challenges, including data efficiency, inference scaling, and architecture-specific constraints, advocating for adaptive scaling strategies tailored to real-world applications. We suggest that while scaling laws provide a useful guide, they do not always generalize across all architectures and training strategies.
Virtual Mouse And Assistant: A Technological Revolution Of Artificial Intelligence
Mar 11, 2023The purpose of this paper is to enhance the performance of the virtual assistant. So, what exactly is a virtual assistant. Application software, often called virtual assistants, also known as AI assistants or digital assistants, is software that understands natural language voice commands and can perform tasks on your behalf. What does a virtual assistant do. Virtual assistants can complete practically any specific smartphone or PC activity that you can complete on your own, and the list is continually expanding. Virtual assistants typically do an impressive variety of tasks, including scheduling meetings, delivering messages, and monitoring the weather. Previous virtual assistants, like Google Assistant and Cortana, had limits in that they could only perform searches and were not entirely automated. For instance, these engines do not have the ability to forward and rewind the song in order to maintain the control function of the song; they can only have the module to search for songs and play them. Currently, we are working on a project where we are automating Google, YouTube, and many other new things to improve the functionality of this project. Now, in order to simplify the process, we've added a virtual mouse that can only be used for cursor control and clicking. It receives input from the camera, and our index finger acts as the mouse tip, our middle finger as the right click, and so forth.
Blockchain-based decentralized voting system security Perspective: Safe and secure for digital voting system
Mar 11, 2023This research study focuses primarily on Block-Chain-based voting systems, which facilitate participation in and administration of voting for voters, candidates, and officials. Because we used Block-Chain in the backend, which enables everyone to trace vote fraud, our system is incredibly safe. This paper approach any unique identification the Aadhar Card number or an OTP will be generated then user can utilise the voting system to cast his/her vote. A proposal for Bit-coin, a virtual currency system that is decided by a central authority for producing money, transferring ownership, and validating transactions, included the peer-to-peer network in a Block-Chain system, the ledger is duplicated across several, identical databases which is hosted and updated by a different process and all other nodes are updated concurrently if changes made to one node and a transaction occurs, the records of the values and assets are permanently exchanged, Only the user and the system need to be verified no other authentication required. If any transaction carried out on a block chain-based system would be settled in a matter of seconds while still being safe, verifiable, and transparent. Although block-chain technology is the foundation for Bitcoin and other digital currencies but also it may be applied widely to greatly reduce difficulties in many other sectors, Voting is the sector that is battling from a lack of security, centralized-authority, management-issues, and many more despite the fact that transactions are kept in a distributed and safe fashion.
Predicting Dense and Context-aware Cost Maps for Semantic Robot Navigation
Oct 17, 2022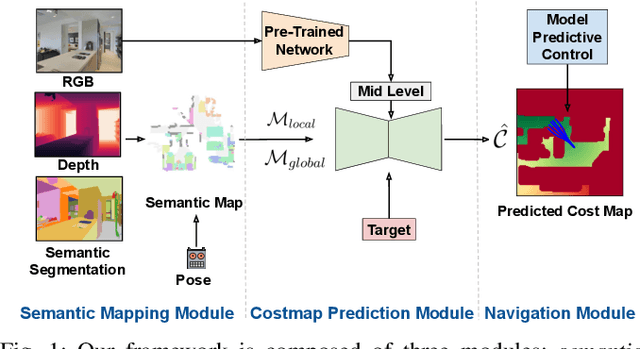
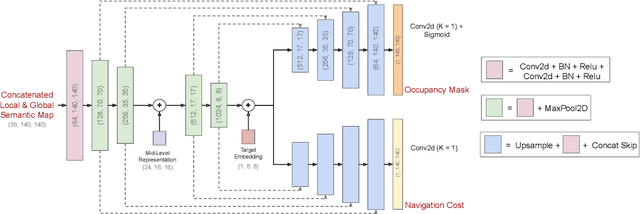
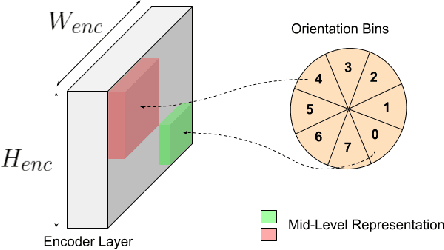
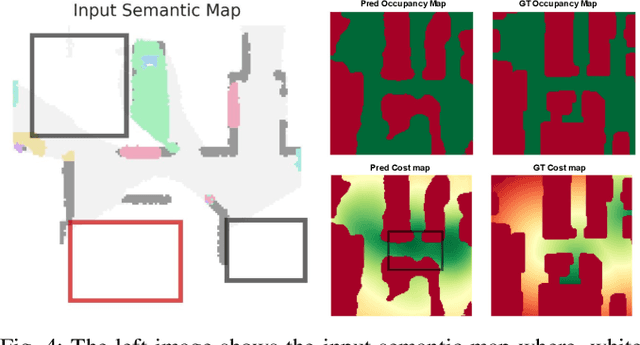
We investigate the task of object goal navigation in unknown environments where the target is specified by a semantic label (e.g. find a couch). Such a navigation task is especially challenging as it requires understanding of semantic context in diverse settings. Most of the prior work tackles this problem under the assumption of a discrete action policy whereas we present an approach with continuous control which brings it closer to real world applications. We propose a deep neural network architecture and loss function to predict dense cost maps that implicitly contain semantic context and guide the robot towards the semantic goal. We also present a novel way of fusing mid-level visual representations in our architecture to provide additional semantic cues for cost map prediction. The estimated cost maps are then used by a sampling-based model predictive controller (MPC) for generating continuous robot actions. The preliminary experiments suggest that the cost maps generated by our network are suitable for the MPC and can guide the agent to the semantic goal more efficiently than a baseline approach. The results also indicate the importance of mid-level representations for navigation by improving the success rate by 7 percentage points.
IVO: Inverse Velocity Obstacles for Real Time Navigation
May 04, 2019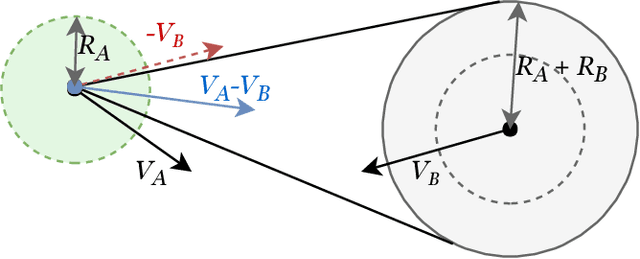
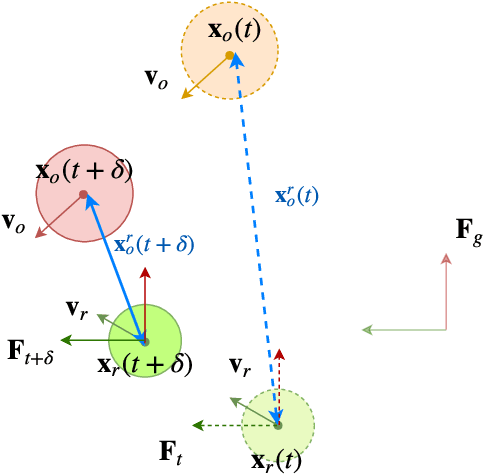
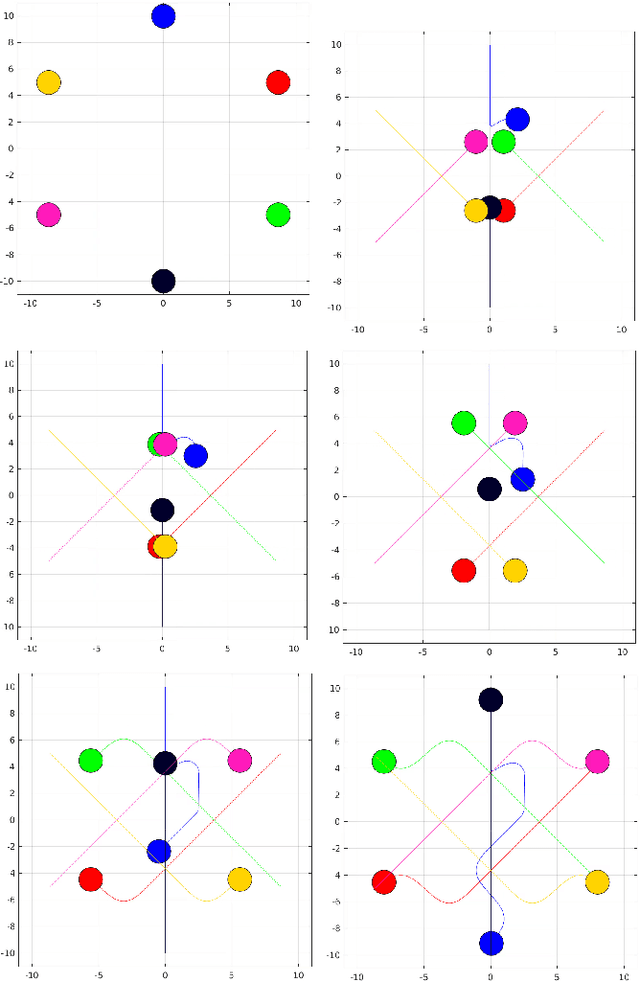
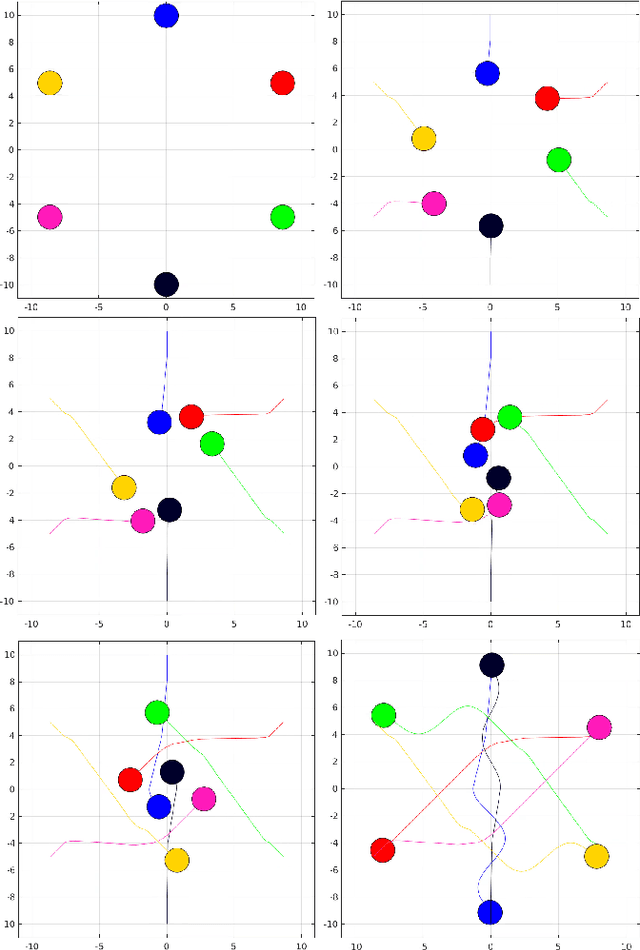
In this paper, we present "IVO: Inverse Velocity Obstacles" an ego-centric framework that improves the real time implementation. The proposed method stems from the concept of velocity obstacle and can be applied for both single agent and multi-agent system. It focuses on computing collision free maneuvers without any knowledge or assumption on the pose and the velocity of the robot. This is primarily achieved by reformulating the velocity obstacle to adapt to an ego-centric framework. This is a significant step towards improving real time implementations of collision avoidance in dynamic environments as there is no dependency on state estimation techniques to infer the robot pose and velocity. We evaluate IVO for both single agent and multi-agent in different scenarios and show it's efficacy over the existing formulations. We also show the real time scalability of the proposed methodology.