 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Navigation under Non-Parametric Uncertainty through Hilbert Space Embedding of Probabilistic Velocity Obstacles
Jan 21, 2020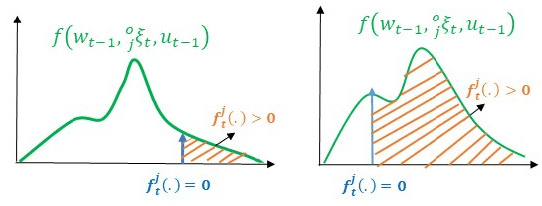
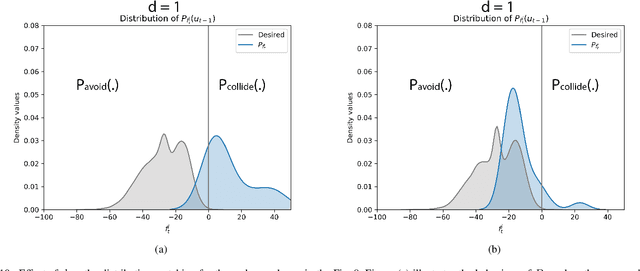
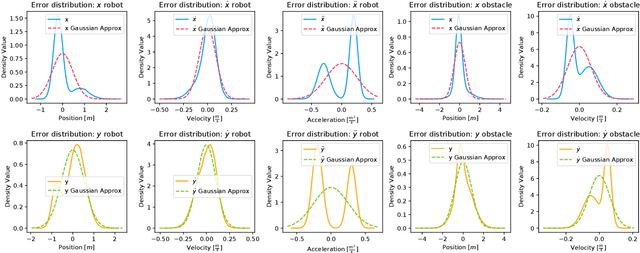
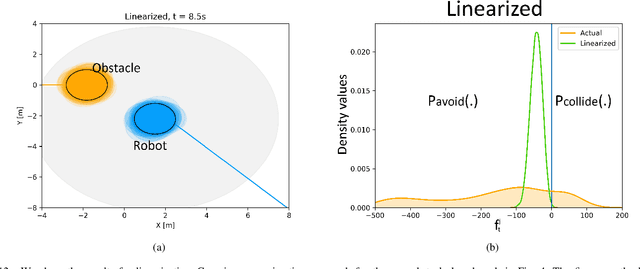
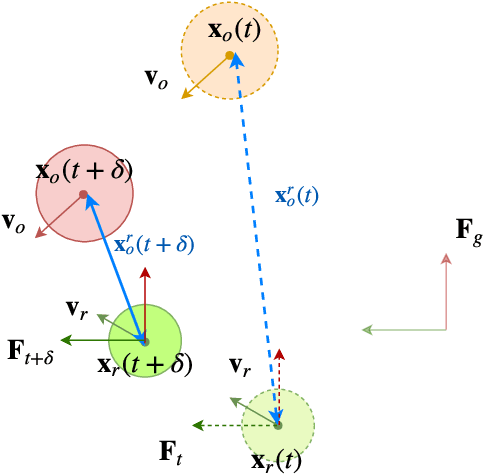
The probabilistic velocity obstacle (PVO) extends the concept of velocity obstacle (VO) to work in uncertain dynamic environments. In this paper, we show how a robust model predictive control (MPC) with PVO constraints under non-parametric uncertainty can be made computationally tractable. At the core of our formulation is a novel yet simple interpretation of our robust MPC as a problem of matching the distribution of PVO with a certain desired distribution. To this end, we propose two methods. Our first baseline method is based on approximating the distribution of PVO with a Gaussian Mixture Model (GMM) and subsequently performing distribution matching using Kullback Leibler (KL) divergence metric. Our second formulation is based on the possibility of representing arbitrary distributions as functions in Reproducing Kernel Hilbert Space (RKHS). We use this foundation to interpret our robust MPC as a problem of minimizing the distance between the desired distribution and the distribution of the PVO in the RKHS. Both the RKHS and GMM based formulation can work with any uncertainty distribution and thus allowing us to relax the prevalent Gaussian assumption in the existing works. We validate our formulation by taking an example of 2D navigation of quadrotors with a realistic noise model for perception and ego-motion uncertainty. In particular, we present a systematic comparison between the GMM and the RKHS approach and show that while both approaches can produce safe trajectories, the former is highly conservative and leads to poor tracking and control costs. Furthermore, RKHS based approach gives better computational times that are up to one order of magnitude lesser than the computation time of the GMM based approach.
IVO: Inverse Velocity Obstacles for Real Time Navigation
May 04, 2019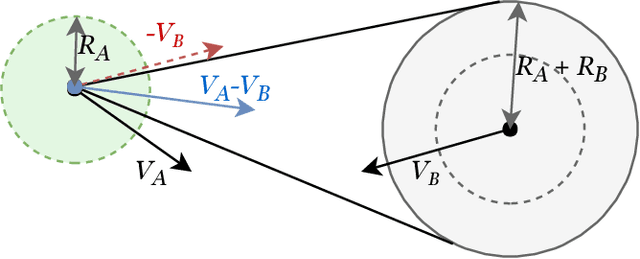
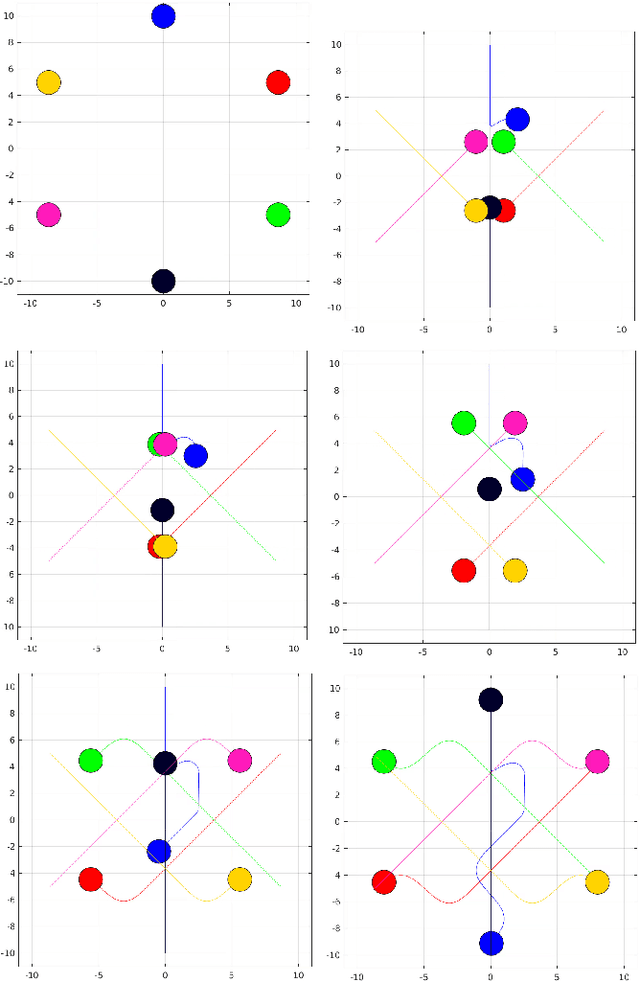
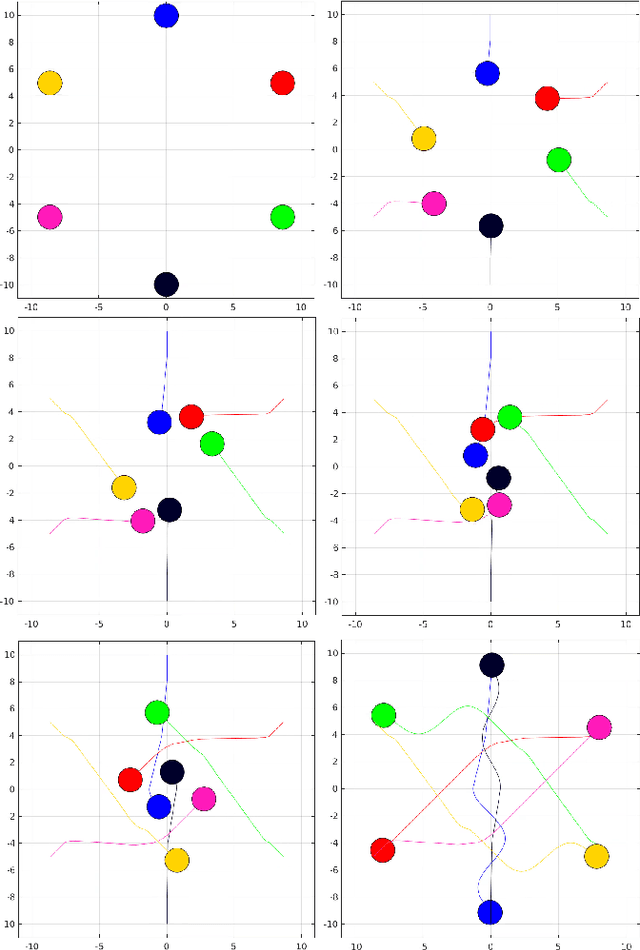
In this paper, we present "IVO: Inverse Velocity Obstacles" an ego-centric framework that improves the real time implementation. The proposed method stems from the concept of velocity obstacle and can be applied for both single agent and multi-agent system. It focuses on computing collision free maneuvers without any knowledge or assumption on the pose and the velocity of the robot. This is primarily achieved by reformulating the velocity obstacle to adapt to an ego-centric framework. This is a significant step towards improving real time implementations of collision avoidance in dynamic environments as there is no dependency on state estimation techniques to infer the robot pose and velocity. We evaluate IVO for both single agent and multi-agent in different scenarios and show it's efficacy over the existing formulations. We also show the real time scalability of the proposed methodology.