 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIVO: Inverse Velocity Obstacles for Real Time Navigation
Paper and Code
May 04, 2019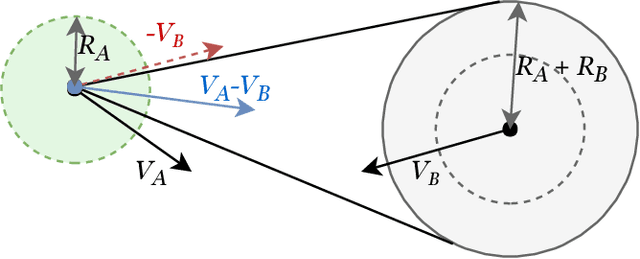
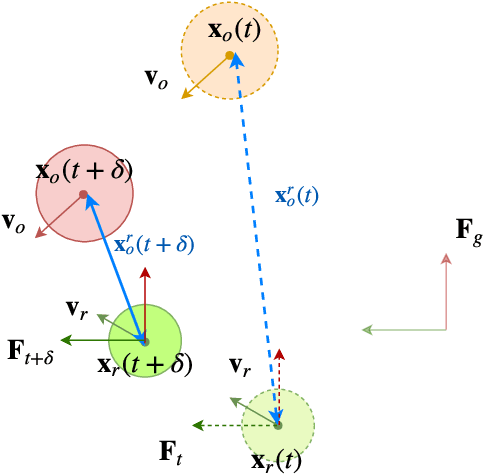
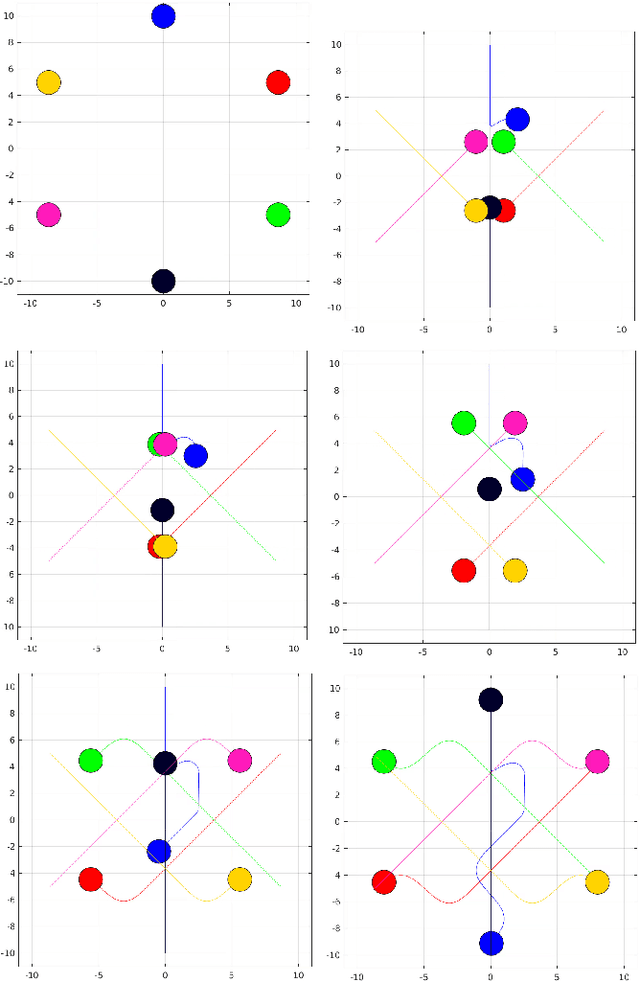
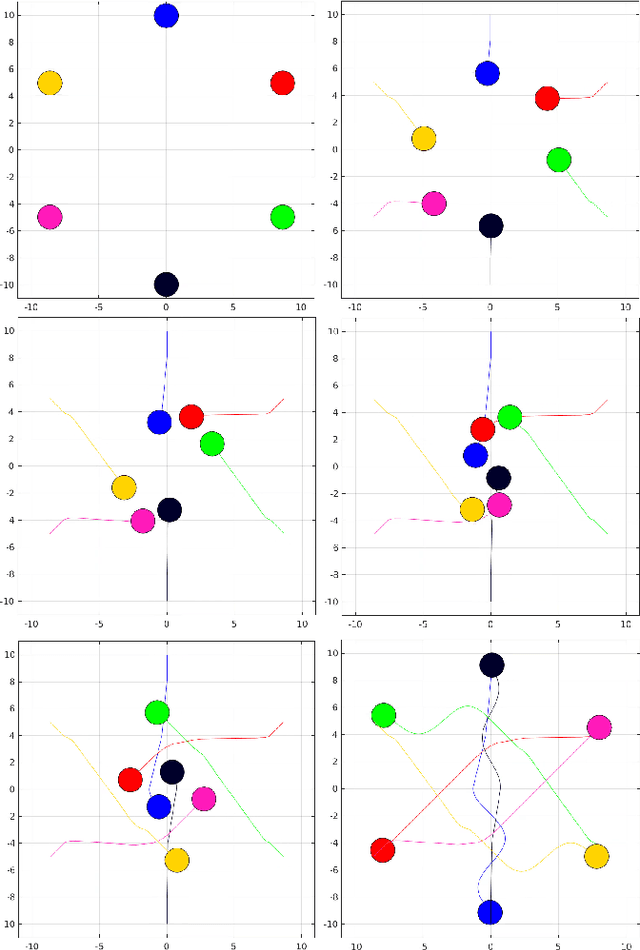
In this paper, we present "IVO: Inverse Velocity Obstacles" an ego-centric framework that improves the real time implementation. The proposed method stems from the concept of velocity obstacle and can be applied for both single agent and multi-agent system. It focuses on computing collision free maneuvers without any knowledge or assumption on the pose and the velocity of the robot. This is primarily achieved by reformulating the velocity obstacle to adapt to an ego-centric framework. This is a significant step towards improving real time implementations of collision avoidance in dynamic environments as there is no dependency on state estimation techniques to infer the robot pose and velocity. We evaluate IVO for both single agent and multi-agent in different scenarios and show it's efficacy over the existing formulations. We also show the real time scalability of the proposed methodology.