 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Collaborative Visual SLAM exploiting ORB Features
Jul 07, 2024In autonomous robotics, a significant challenge involves devising robust solutions for Active Collaborative SLAM (AC-SLAM). This process requires multiple robots to cooperatively explore and map an unknown environment by intelligently coordinating their movements and sensor data acquisition. In this article, we present an efficient visual AC-SLAM method using aerial and ground robots for environment exploration and mapping. We propose an efficient frontiers filtering method that takes into account the common IoU map frontiers and reduces the frontiers for each robot. Additionally, we also present an approach to guide robots to previously visited goal positions to promote loop closure to reduce SLAM uncertainty. The proposed method is implemented in ROS and evaluated through simulations on publicly available datasets and similar methods, achieving an accumulative average of 59% of increase in area coverage.
Active SLAM Utility Function Exploiting Path Entropy
Sep 28, 2023
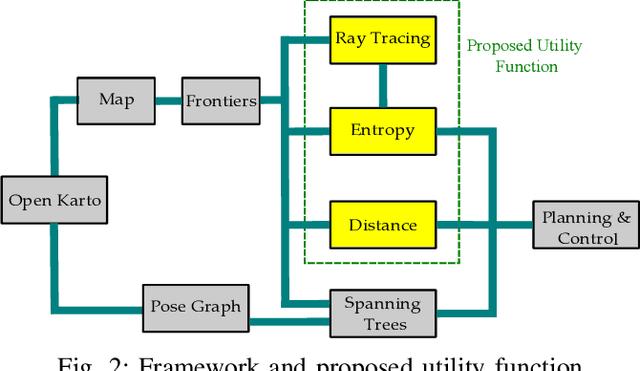

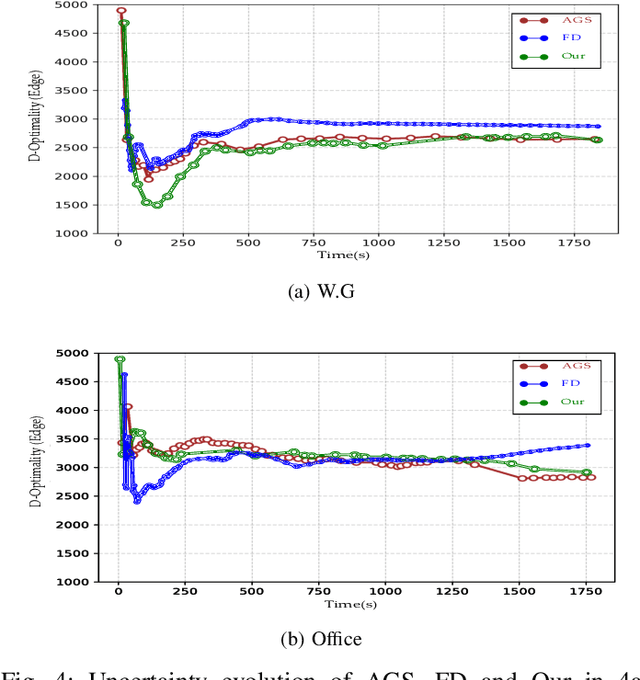
In this article we present a utility function for Active SLAM (A-SLAM) which utilizes map entropy along with D-Optimality criterion metrices for weighting goal frontier candidates. We propose a utility function for frontier goal selection that exploits the occupancy grid map by utilizing the path entropy and favors unknown map locations for maximum area coverage while maintaining a low localization and mapping uncertainties. We quantify the efficiency of our method using various graph connectivity matrices and map efficiency indexes for an environment exploration task. Using simulation and experimental results against similar approaches we achieve an average of 32\% more coverage using publicly available data sets.
Relative Pose Based Redundancy Removal: Collaborative RGB-D Data Transmission in Mobile Visual Sensor Networks
Feb 27, 2018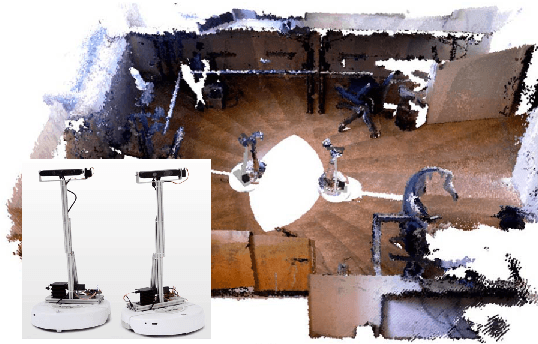
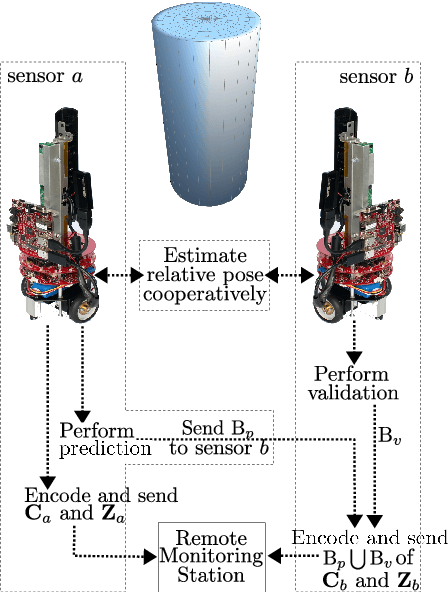
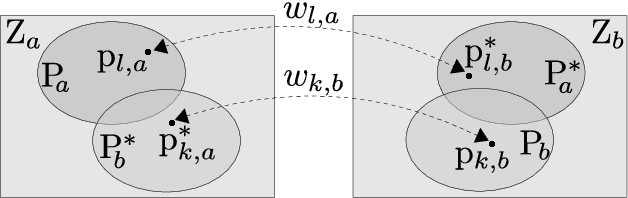
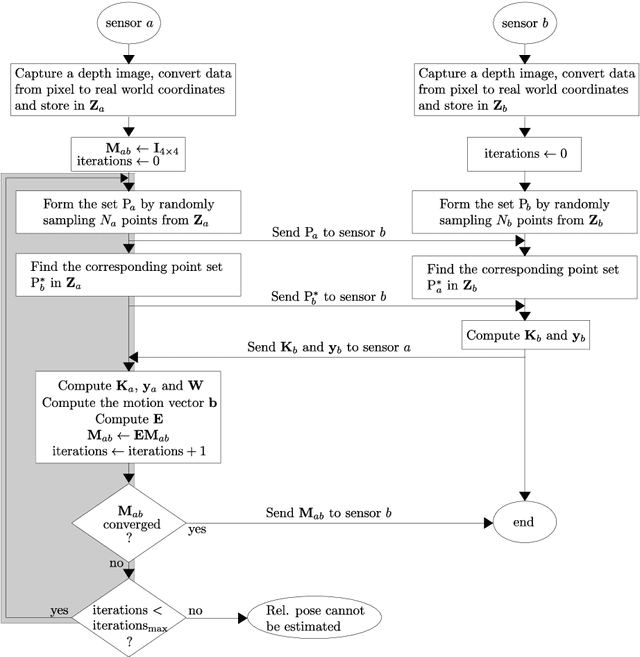
The Relative Pose based Redundancy Removal(RPRR) scheme is presented, which has been designed for mobile RGB-D sensor networks operating under bandwidth-constrained operational scenarios. Participating sensor nodes detect the redundant visual and depth information to prevent their transmission leading to a significant improvement in wireless channel usage efficiency and power savings. Experimental results show that wireless channel utilization is improved by 250% and battery consumption is halved when the RPRR scheme is used instead of sending the sensor images independently.
A Loosely-Coupled Approach for Metric Scale Estimation in Monocular Vision-Inertial Systems
Oct 09, 2017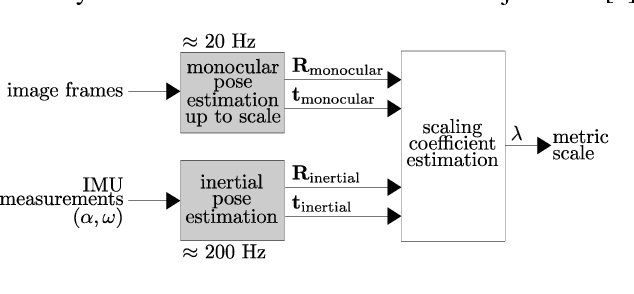
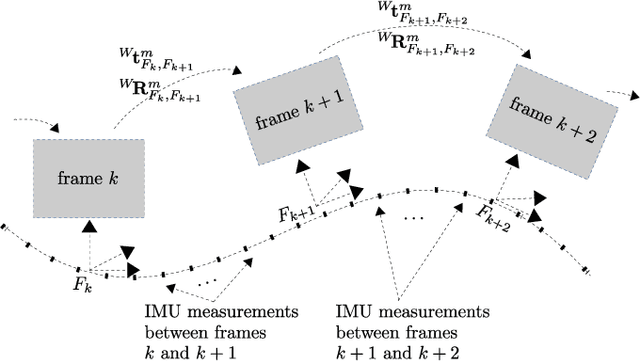

In monocular vision systems, lack of knowledge about metric distances caused by the inherent scale ambiguity can be a strong limitation for some applications. We offer a method for fusing inertial measurements with monocular odometry or tracking to estimate metric distances in inertial-monocular systems and to increase the rate of pose estimates. As we performed the fusion in a loosely-coupled manner, each input block can be easily replaced with one's preference, which makes our method quite flexible. We experimented our method using the ORB-SLAM algorithm for the monocular tracking input and Euler forward integration to process the inertial measurements. We chose sets of data recorded on UAVs to design a suitable system for flying robots.