Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Loosely-Coupled Approach for Metric Scale Estimation in Monocular Vision-Inertial Systems
Paper and Code
Oct 09, 2017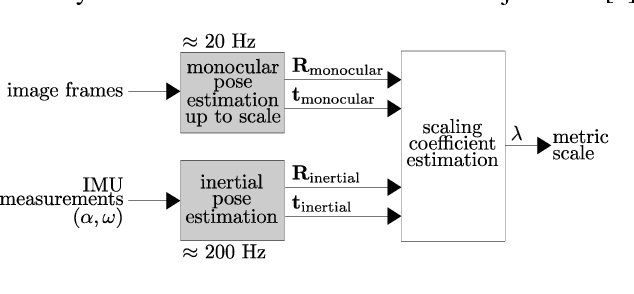

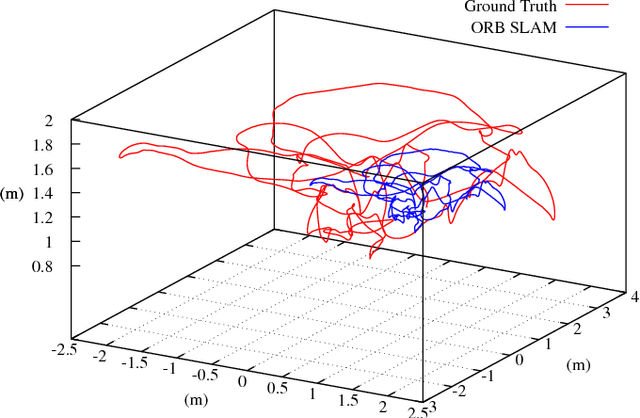
In monocular vision systems, lack of knowledge about metric distances caused by the inherent scale ambiguity can be a strong limitation for some applications. We offer a method for fusing inertial measurements with monocular odometry or tracking to estimate metric distances in inertial-monocular systems and to increase the rate of pose estimates. As we performed the fusion in a loosely-coupled manner, each input block can be easily replaced with one's preference, which makes our method quite flexible. We experimented our method using the ORB-SLAM algorithm for the monocular tracking input and Euler forward integration to process the inertial measurements. We chose sets of data recorded on UAVs to design a suitable system for flying robots.
View paper on