Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive SLAM Utility Function Exploiting Path Entropy
Paper and Code

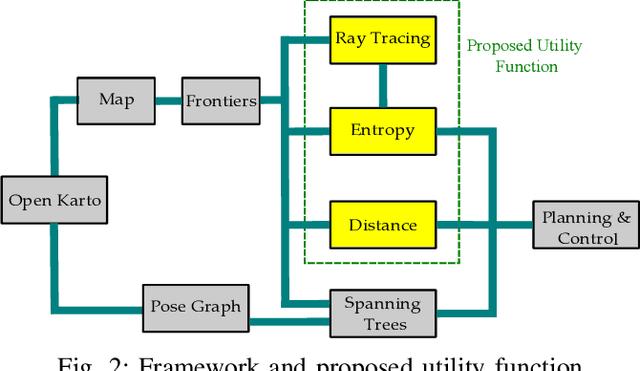

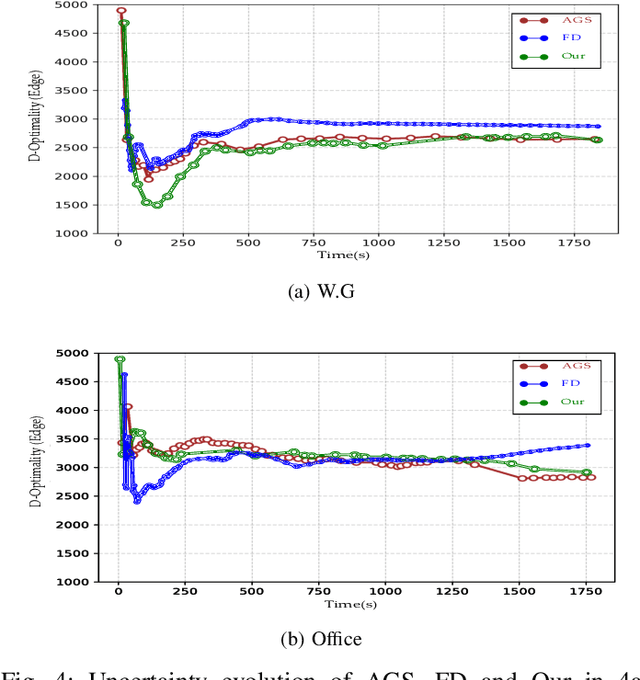
In this article we present a utility function for Active SLAM (A-SLAM) which utilizes map entropy along with D-Optimality criterion metrices for weighting goal frontier candidates. We propose a utility function for frontier goal selection that exploits the occupancy grid map by utilizing the path entropy and favors unknown map locations for maximum area coverage while maintaining a low localization and mapping uncertainties. We quantify the efficiency of our method using various graph connectivity matrices and map efficiency indexes for an environment exploration task. Using simulation and experimental results against similar approaches we achieve an average of 32\% more coverage using publicly available data sets.
* 7 pages, 8 figures, Submitted to IEEE SOLI Conference. arXiv admin
note: text overlap with arXiv:2212.11654
View paper on