 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Multi-Robot Obstacle Detection and Tracking in a Maritime Scenario
Feb 12, 2026Autonomous aerial-surface robot teams are promising for maritime monitoring. Robust deployment requires reliable perception over reflective water and scalable coordination under limited communication. We present a decentralized multi-robot framework for detecting and tracking floating containers using multiple UAVs cooperating with an autonomous surface vessel. Each UAV performs YOLOv8 and stereo-disparity-based visual detection, then tracks targets with per-object EKFs using uncertainty-aware data association. Compact track summaries are exchanged and fused conservatively via covariance intersection, ensuring consistency under unknown correlations. An information-driven assignment module allocates targets and selects UAV hover viewpoints by trading expected uncertainty reduction against travel effort and safety separation. Simulation results in a maritime scenario demonstrate improved coverage, localization accuracy, and tracking consistency while maintaining modest communication requirements.
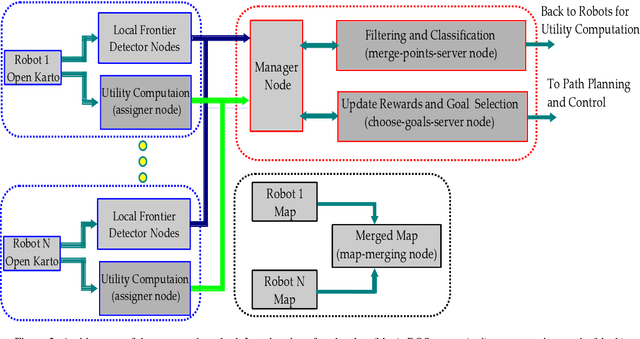
Active Collaborative Visual SLAM exploiting ORB Features
Jul 07, 2024In autonomous robotics, a significant challenge involves devising robust solutions for Active Collaborative SLAM (AC-SLAM). This process requires multiple robots to cooperatively explore and map an unknown environment by intelligently coordinating their movements and sensor data acquisition. In this article, we present an efficient visual AC-SLAM method using aerial and ground robots for environment exploration and mapping. We propose an efficient frontiers filtering method that takes into account the common IoU map frontiers and reduces the frontiers for each robot. Additionally, we also present an approach to guide robots to previously visited goal positions to promote loop closure to reduce SLAM uncertainty. The proposed method is implemented in ROS and evaluated through simulations on publicly available datasets and similar methods, achieving an accumulative average of 59% of increase in area coverage.
Entropy Based Multi-robot Active SLAM
Oct 09, 2023
In this article, we present an efficient multi-robot active SLAM framework that involves a frontier-sharing method for maximum exploration of an unknown environment. It encourages the robots to spread into the environment while weighting the goal frontiers with the pose graph SLAM uncertainly and path entropy. Our approach works on a limited number of frontier points and weights the goal frontiers with a utility function that encapsulates both the SLAM and map uncertainties, thus providing an efficient and not computationally expensive solution. Our approach has been tested on publicly available simulation environments and on real robots. An accumulative 31% more coverage than similar state-of-the-art approaches has been obtained, proving the capability of our approach for efficient environment exploration.
Collaborative Active SLAM: Synchronous and Asynchronous Coordination Among Agents
Oct 03, 2023



In the realm of autonomous robotics, a critical challenge lies in developing robust solutions for Active Collaborative SLAM, wherein multiple robots must collaboratively explore and map an unknown environment while intelligently coordinating their movements and sensor data acquisitions. To this aim, we present two approaches for coordinating a system consisting of multiple robots to perform Active Collaborative SLAM (AC-SLAM) for environmental exploration. Our two coordination approaches, synchronous and asynchronous implement a methodology to prioritize robot goal assignments by the central server. We also present a method to efficiently spread the robots for maximum exploration while keeping SLAM uncertainty low. Both coordination approaches were evaluated through simulation on publicly available datasets, obtaining promising results.
Active SLAM Utility Function Exploiting Path Entropy
Sep 28, 2023
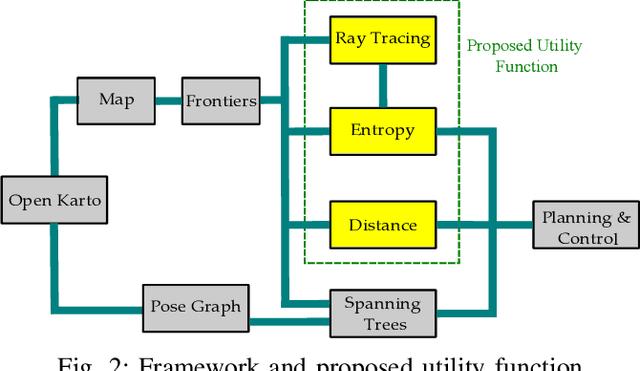

In this article we present a utility function for Active SLAM (A-SLAM) which utilizes map entropy along with D-Optimality criterion metrices for weighting goal frontier candidates. We propose a utility function for frontier goal selection that exploits the occupancy grid map by utilizing the path entropy and favors unknown map locations for maximum area coverage while maintaining a low localization and mapping uncertainties. We quantify the efficiency of our method using various graph connectivity matrices and map efficiency indexes for an environment exploration task. Using simulation and experimental results against similar approaches we achieve an average of 32\% more coverage using publicly available data sets.
Active SLAM: A Review On Last Decade
Dec 22, 2022



This article presents a novel review of Active SLAM (A-SLAM) research conducted in the last decade. We discuss the formulation, application, and methodology applied in A-SLAM for trajectory generation and control action selection using information theory based approaches. Our extensive qualitative and quantitative analysis highlights the approaches, scenarios, configurations, types of robots, sensor types, dataset usage, and path planning approaches of A-SLAM research. We conclude by presenting the limitations and proposing future research possibilities. We believe that this survey will be helpful to researchers in understanding the various methods and techniques applied to A-SLAM formulation.