 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy Based Multi-robot Active SLAM
Oct 09, 2023
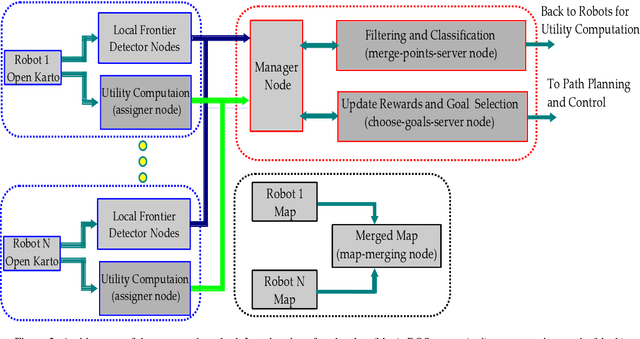
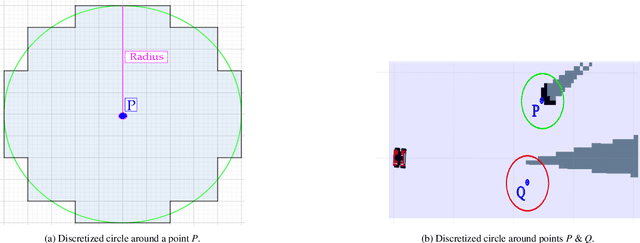
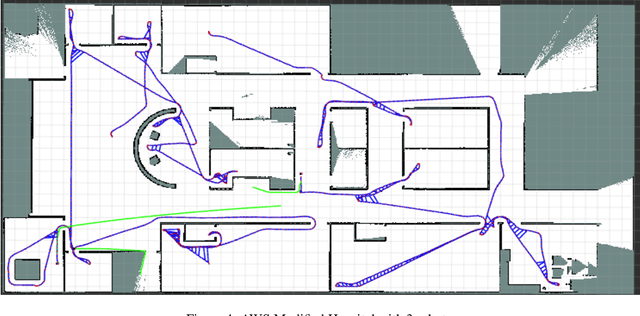
In this article, we present an efficient multi-robot active SLAM framework that involves a frontier-sharing method for maximum exploration of an unknown environment. It encourages the robots to spread into the environment while weighting the goal frontiers with the pose graph SLAM uncertainly and path entropy. Our approach works on a limited number of frontier points and weights the goal frontiers with a utility function that encapsulates both the SLAM and map uncertainties, thus providing an efficient and not computationally expensive solution. Our approach has been tested on publicly available simulation environments and on real robots. An accumulative 31% more coverage than similar state-of-the-art approaches has been obtained, proving the capability of our approach for efficient environment exploration.
Collaborative Active SLAM: Synchronous and Asynchronous Coordination Among Agents
Oct 03, 2023



In the realm of autonomous robotics, a critical challenge lies in developing robust solutions for Active Collaborative SLAM, wherein multiple robots must collaboratively explore and map an unknown environment while intelligently coordinating their movements and sensor data acquisitions. To this aim, we present two approaches for coordinating a system consisting of multiple robots to perform Active Collaborative SLAM (AC-SLAM) for environmental exploration. Our two coordination approaches, synchronous and asynchronous implement a methodology to prioritize robot goal assignments by the central server. We also present a method to efficiently spread the robots for maximum exploration while keeping SLAM uncertainty low. Both coordination approaches were evaluated through simulation on publicly available datasets, obtaining promising results.