 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Compact Terrain-Context Representations for Feasibility-Aware Offline Reinforcement Learning in UAV Relaying Networks
Mar 31, 2026Offline reinforcement learning (RL) is an attractive tool for unmanned aerial vehicle (UAV) systems, where online exploration is costly and raises safety concerns. In terrain-aware UAV relaying, agents may observe high-dimensional inputs such as terrain and land-cover maps, which describe the propagation environment, but complicate offline learning from fixed datasets. This paper investigates the impact of compact state representations on offline RL for UAV relaying. End-to-end service is jointly constrained by UAV--user access links and a base-station--to--UAV backhaul link, yielding feasibility limits driven by user mobility and independent of UAV control. To distinguish feasibility limits from control-induced sub-optimality, a candidate-set feasibility upper bound (CS-FUB) is introduced, which estimates the maximum achievable user coverage over a restricted set of UAV placements. To address high-dimensional terrain context, map-like observations are compressed into low-dimensional latent representations using a variational autoencoder (VAE) and policies are trained via Conservative Q-Learning (CQL). Simulation results show that training CQL directly on raw high-dimensional terrain-context states leads to slow convergence and large feasibility gaps. In contrast, VAE-encoded representations improve learning stability, enable earlier convergence to feasible relay configurations, and reduce sub-optimality relative to physical limits. Comparisons with autoencoder and linear compression baselines further demonstrate the benefit of structured representation learning for effective offline RL in terrain-aware UAV systems.
Enhancing UAV Path Planning Efficiency Through Accelerated Learning
Jan 17, 2025Unmanned Aerial Vehicles (UAVs) are increasingly essential in various fields such as surveillance, reconnaissance, and telecommunications. This study aims to develop a learning algorithm for the path planning of UAV wireless communication relays, which can reduce storage requirements and accelerate Deep Reinforcement Learning (DRL) convergence. Assuming the system possesses terrain maps of the area and can estimate user locations using localization algorithms or direct GPS reporting, it can input these parameters into the learning algorithms to achieve optimized path planning performance. However, higher resolution terrain maps are necessary to extract topological information such as terrain height, object distances, and signal blockages. This requirement increases memory and storage demands on UAVs while also lengthening convergence times in DRL algorithms. Similarly, defining the telecommunication coverage map in UAV wireless communication relays using these terrain maps and user position estimations demands higher memory and storage utilization for the learning path planning algorithms. Our approach reduces path planning training time by applying a dimensionality reduction technique based on Principal Component Analysis (PCA), sample combination, Prioritized Experience Replay (PER), and the combination of Mean Squared Error (MSE) and Mean Absolute Error (MAE) loss calculations in the coverage map estimates, thereby enhancing a Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithm. The proposed solution reduces the convergence episodes needed for basic training by approximately four times compared to the traditional TD3.
Density-Aware Reinforcement Learning to Optimise Energy Efficiency in UAV-Assisted Networks
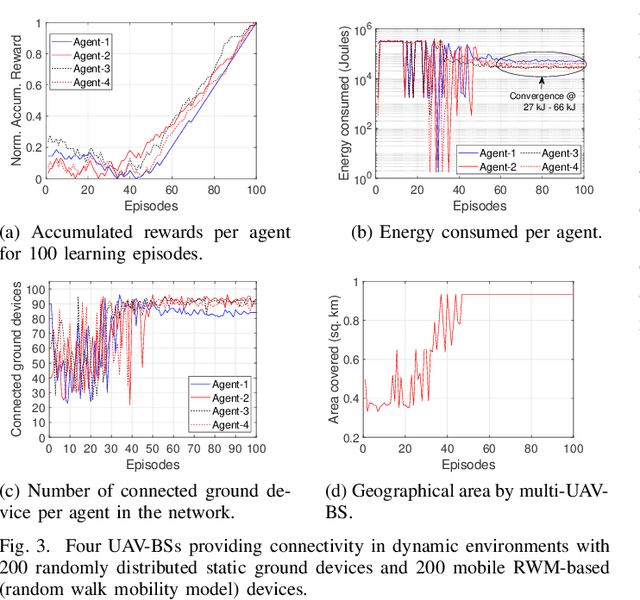
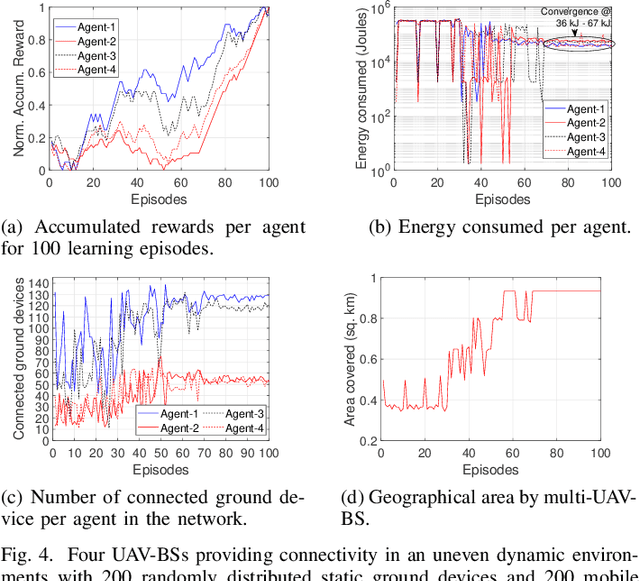
Jun 14, 2023Unmanned aerial vehicles (UAVs) serving as aerial base stations can be deployed to provide wireless connectivity to mobile users, such as vehicles. However, the density of vehicles on roads often varies spatially and temporally primarily due to mobility and traffic situations in a geographical area, making it difficult to provide ubiquitous service. Moreover, as energy-constrained UAVs hover in the sky while serving mobile users, they may be faced with interference from nearby UAV cells or other access points sharing the same frequency band, thereby impacting the system's energy efficiency (EE). Recent multi-agent reinforcement learning (MARL) approaches applied to optimise the users' coverage worked well in reasonably even densities but might not perform as well in uneven users' distribution, i.e., in urban road networks with uneven concentration of vehicles. In this work, we propose a density-aware communication-enabled multi-agent decentralised double deep Q-network (DACEMAD-DDQN) approach that maximises the total system's EE by jointly optimising the trajectory of each UAV, the number of connected users, and the UAVs' energy consumption while keeping track of dense and uneven users' distribution. Our result outperforms state-of-the-art MARL approaches in terms of EE by as much as 65% - 85%.
Deep Reinforcement Learning for Combined Coverage and Resource Allocation in UAV-aided RAN-slicing
Nov 15, 2022Network slicing is a well assessed approach enabling virtualization of the mobile core and radio access network (RAN) in the emerging 5th Generation New Radio. Slicing is of paramount importance when dealing with the emerging and diverse vertical applications entailing heterogeneous sets of requirements. 5G is also envisioning Unmanned Aerial Vehicles (UAVs) to be a key element in the cellular network standard, aiming at their use as aerial base stations and exploiting their flexible and quick deployment to enhance the wireless network performance. This work presents a UAV-assisted 5G network, where the aerial base stations (UAV-BS) are empowered with network slicing capabilities aiming at optimizing the Service Level Agreement (SLA) satisfaction ratio of a set of users. The users belong to three heterogeneous categories of 5G service type, namely, enhanced mobile broadband (eMBB), ultra-reliable low-latency communication (URLLC), and massive machine-type communication (mMTC). A first application of multi-agent and multi-decision deep reinforcement learning for UAV-BS in a network slicing context is introduced, aiming at the optimization of the SLA satisfaction ratio of users through the joint allocation of radio resources to slices and refinement of the UAV-BSs 2-dimensional trajectories. The performance of the presented strategy have been tested and compared to benchmark heuristics, highlighting a higher percentage of satisfied users (at least 27% more) in a variety of scenarios.
Optimising Energy Efficiency in UAV-Assisted Networks using Deep Reinforcement Learning
Apr 04, 2022



In this letter, we study the energy efficiency (EE) optimisation of unmanned aerial vehicles (UAVs) providing wireless coverage to static and mobile ground users. Recent multi-agent reinforcement learning approaches optimise the system's EE using a 2D trajectory design, neglecting interference from nearby UAV cells. We aim to maximise the system's EE by jointly optimising each UAV's 3D trajectory, number of connected users, and the energy consumed, while accounting for interference. Thus, we propose a cooperative Multi-Agent Decentralised Double Deep Q-Network (MAD-DDQN) approach. Our approach outperforms existing baselines in terms of EE by as much as 55 -- 80%.
Multi-Agent Deep Reinforcement Learning For Optimising Energy Efficiency of Fixed-Wing UAV Cellular Access Points
Nov 03, 2021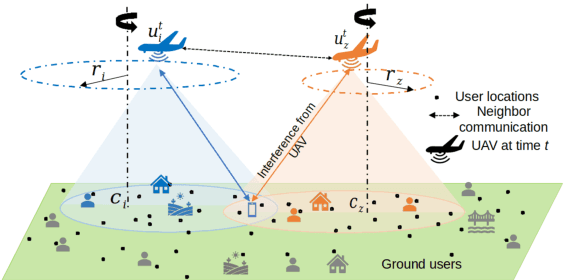
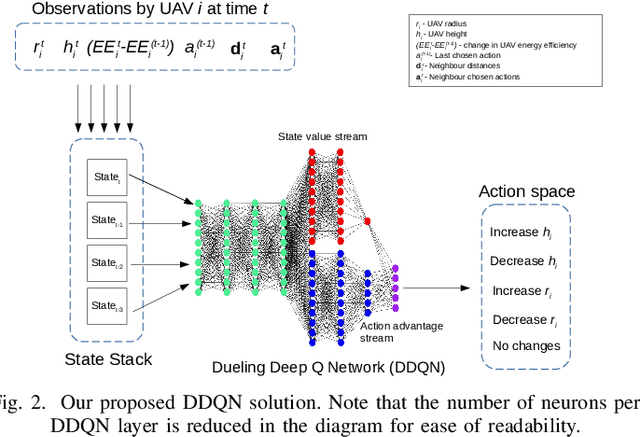
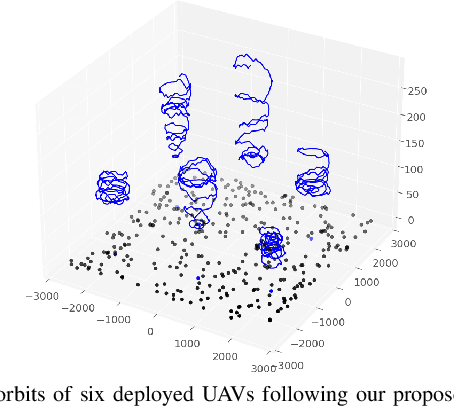
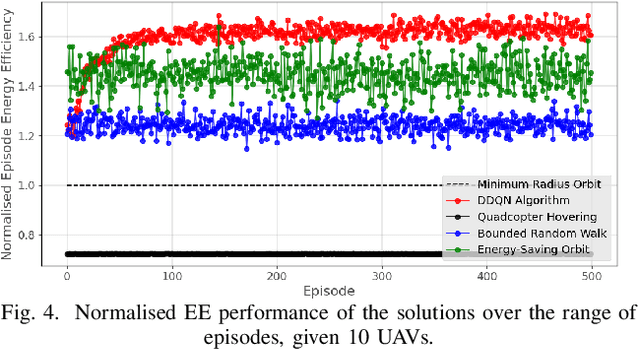
Unmanned Aerial Vehicles (UAVs) promise to become an intrinsic part of next generation communications, as they can be deployed to provide wireless connectivity to ground users to supplement existing terrestrial networks. The majority of the existing research into the use of UAV access points for cellular coverage considers rotary-wing UAV designs (i.e. quadcopters). However, we expect fixed-wing UAVs to be more appropriate for connectivity purposes in scenarios where long flight times are necessary (such as for rural coverage), as fixed-wing UAVs rely on a more energy-efficient form of flight when compared to the rotary-wing design. As fixed-wing UAVs are typically incapable of hovering in place, their deployment optimisation involves optimising their individual flight trajectories in a way that allows them to deliver high quality service to the ground users in an energy-efficient manner. In this paper, we propose a multi-agent deep reinforcement learning approach to optimise the energy efficiency of fixed-wing UAV cellular access points while still allowing them to deliver high-quality service to users on the ground. In our decentralized approach, each UAV is equipped with a Dueling Deep Q-Network (DDQN) agent which can adjust the 3D trajectory of the UAV over a series of timesteps. By coordinating with their neighbours, the UAVs adjust their individual flight trajectories in a manner that optimises the total system energy efficiency. We benchmark the performance of our approach against a series of heuristic trajectory planning strategies, and demonstrate that our method can improve the system energy efficiency by as much as 70%.
Energy-aware placement optimization of UAV base stations via decentralized multi-agent Q-learning
Jun 01, 2021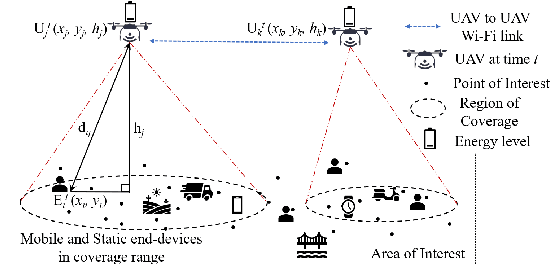
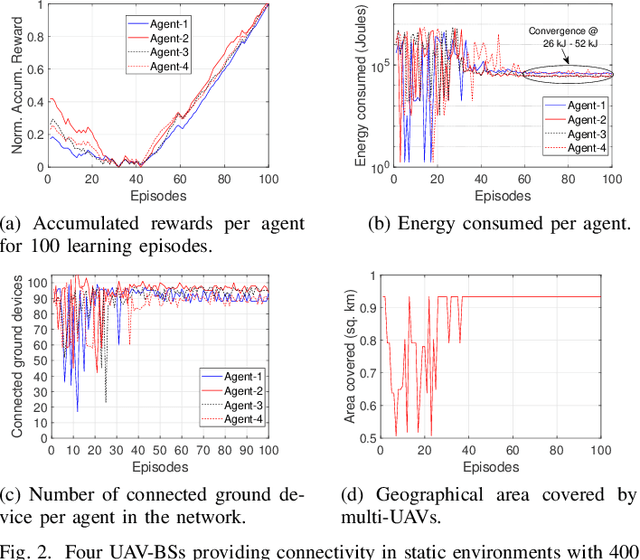
Unmanned aerial vehicles serving as aerial base stations (UAV-BSs) can be deployed to provide wireless connectivity to ground devices in events of increased network demand, points-of-failure in existing infrastructure, or disasters. However, it is challenging to conserve the energy of UAVs during prolonged coverage tasks, considering their limited on-board battery capacity. Reinforcement learning-based (RL) approaches have been previously used to improve energy utilization of multiple UAVs, however, a central cloud controller is assumed to have complete knowledge of the end-devices' locations, i.e., the controller periodically scans and sends updates for UAV decision-making. This assumption is impractical in dynamic network environments with mobile ground devices. To address this problem, we propose a decentralized Q-learning approach, where each UAV-BS is equipped with an autonomous agent that maximizes the connectivity to ground devices while improving its energy utilization. Experimental results show that the proposed design significantly outperforms the centralized approaches in jointly maximizing the number of connected ground devices and the energy utilization of the UAV-BSs.
Adaptive Height Optimisation for Cellular-Connected UAVs using Reinforcement Learning
Jul 27, 2020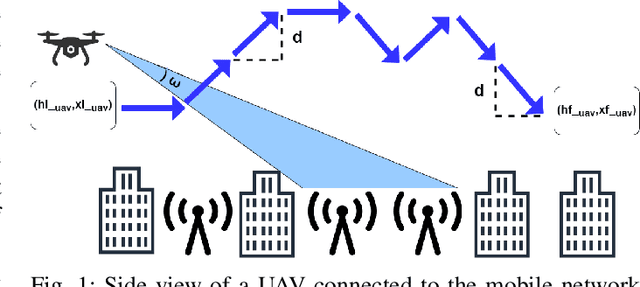
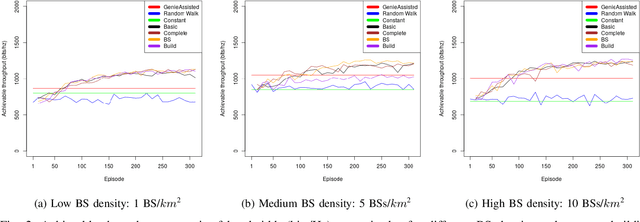

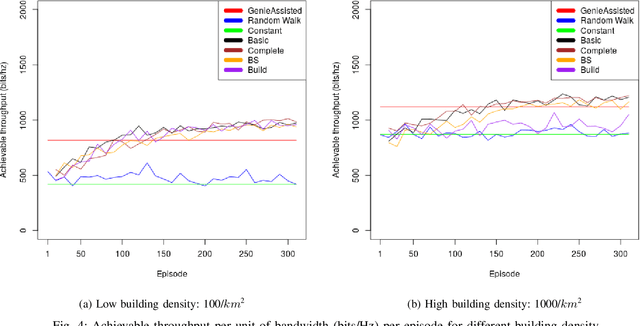
With the increasing number of \acp{uav} as users of the cellular network, the research community faces particular challenges in providing reliable \ac{uav} connectivity. A challenge that has limited research is understanding how the local building and \ac{bs} density affects \ac{uav}'s connection to a cellular network, that in the physical layer is related to its spectrum efficiency. With more \acp{bs}, the \ac{uav} connectivity could be negatively affected as it has \ac{los} to most of them, decreasing its spectral efficiency. On the other hand, buildings could be blocking interference from undesirable \ac{bs}, improving the link of the \ac{uav} to the serving \ac{bs}. This paper proposes a \ac{rl}-based algorithm to optimise the height of a UAV, as it moves dynamically within a range of heights, with the focus of increasing the UAV spectral efficiency. We evaluate the solution for different \ac{bs} and building densities. Our results show that in most scenarios \ac{rl} outperforms the baselines achieving up to 125\% over naive constant baseline, and up to 20\% over greedy approach with up front knowledge of the best height of UAV in the next time step.