 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiFF: Bi-level Future Fusion with Polyline-based Coordinate for Interactive Trajectory Prediction
Jun 25, 2023



Predicting future trajectories of surrounding agents is essential for safety-critical autonomous driving. Most existing work focuses on predicting marginal trajectories for each agent independently. However, it has rarely been explored in predicting joint trajectories for interactive agents. In this work, we propose Bi-level Future Fusion (BiFF) to explicitly capture future interactions between interactive agents. Concretely, BiFF fuses the high-level future intentions followed by low-level future behaviors. Then the polyline-based coordinate is specifically designed for multi-agent prediction to ensure data efficiency, frame robustness, and prediction accuracy. Experiments show that BiFF achieves state-of-the-art performance on the interactive prediction benchmark of Waymo Open Motion Dataset.
The Devil is in the Wrongly-classified Samples: Towards Unified Open-set Recognition
Feb 08, 2023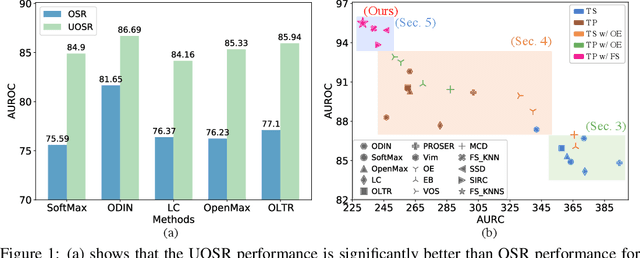
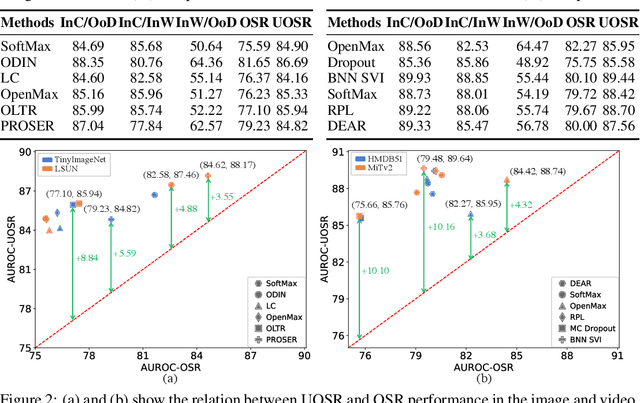
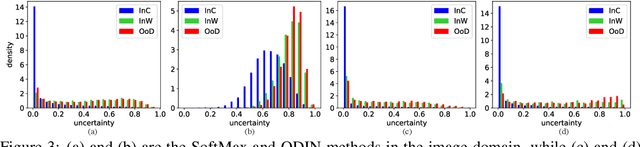
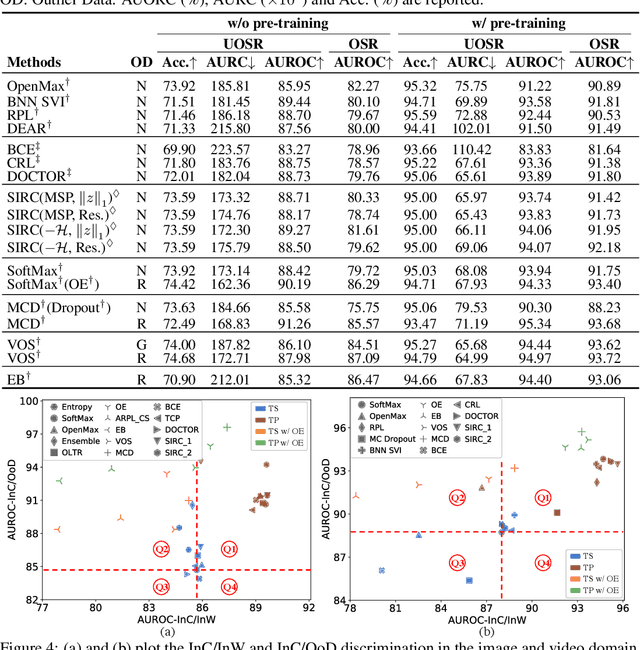
Open-set Recognition (OSR) aims to identify test samples whose classes are not seen during the training process. Recently, Unified Open-set Recognition (UOSR) has been proposed to reject not only unknown samples but also known but wrongly classified samples, which tends to be more practical in real-world applications. The UOSR draws little attention since it is proposed, but we find sometimes it is even more practical than OSR in the real world applications, as evaluation results of known but wrongly classified samples are also wrong like unknown samples. In this paper, we deeply analyze the UOSR task under different training and evaluation settings to shed light on this promising research direction. For this purpose, we first evaluate the UOSR performance of several OSR methods and show a significant finding that the UOSR performance consistently surpasses the OSR performance by a large margin for the same method. We show that the reason lies in the known but wrongly classified samples, as their uncertainty distribution is extremely close to unknown samples rather than known and correctly classified samples. Second, we analyze how the two training settings of OSR (i.e., pre-training and outlier exposure) influence the UOSR. We find although they are both beneficial for distinguishing known and correctly classified samples from unknown samples, pre-training is also helpful for identifying known but wrongly classified samples while outlier exposure is not. In addition to different training settings, we also formulate a new evaluation setting for UOSR which is called few-shot UOSR, where only one or five samples per unknown class are available during evaluation to help identify unknown samples. We propose FS-KNNS for the few-shot UOSR to achieve state-of-the-art performance under all settings.
Open-world Semantic Segmentation for LIDAR Point Clouds
Jul 04, 2022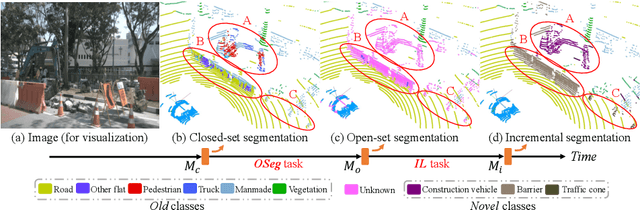
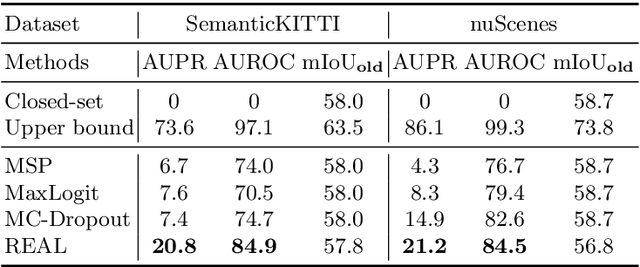
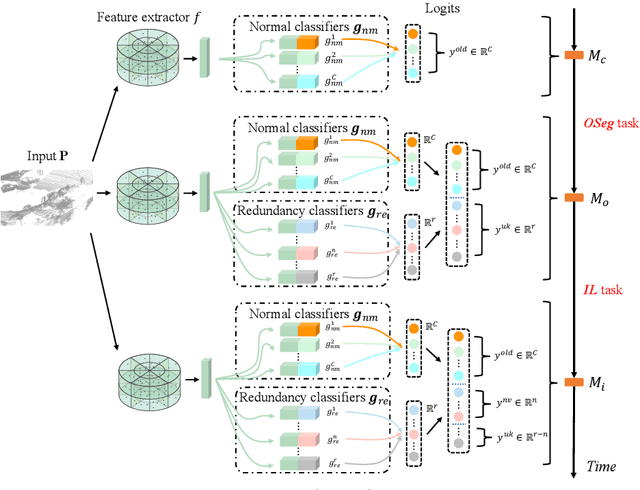
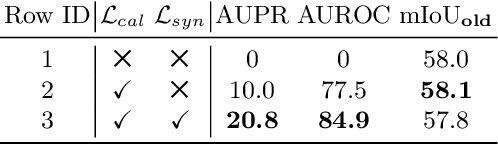
Current methods for LIDAR semantic segmentation are not robust enough for real-world applications, e.g., autonomous driving, since it is closed-set and static. The closed-set assumption makes the network only able to output labels of trained classes, even for objects never seen before, while a static network cannot update its knowledge base according to what it has seen. Therefore, in this work, we propose the open-world semantic segmentation task for LIDAR point clouds, which aims to 1) identify both old and novel classes using open-set semantic segmentation, and 2) gradually incorporate novel objects into the existing knowledge base using incremental learning without forgetting old classes. For this purpose, we propose a REdundAncy cLassifier (REAL) framework to provide a general architecture for both the open-set semantic segmentation and incremental learning problems. The experimental results show that REAL can simultaneously achieves state-of-the-art performance in the open-set semantic segmentation task on the SemanticKITTI and nuScenes datasets, and alleviate the catastrophic forgetting problem with a large margin during incremental learning.
Learning to Predict Vehicle Trajectories with Model-based Planning
Mar 06, 2021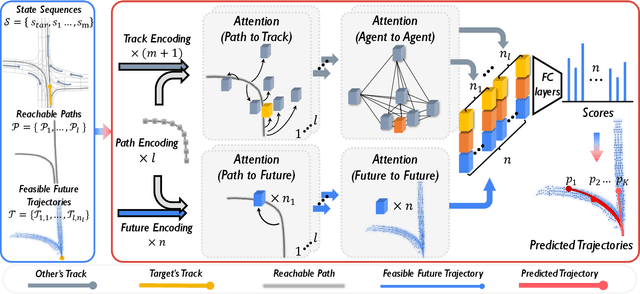
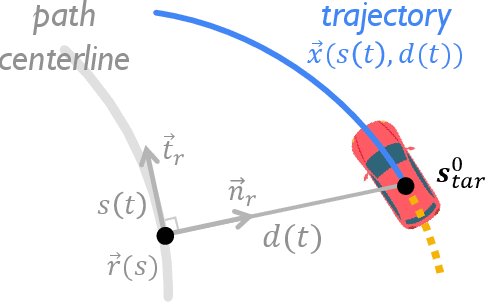
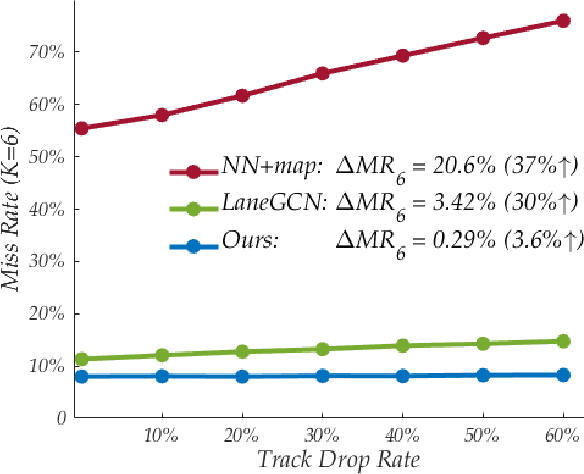
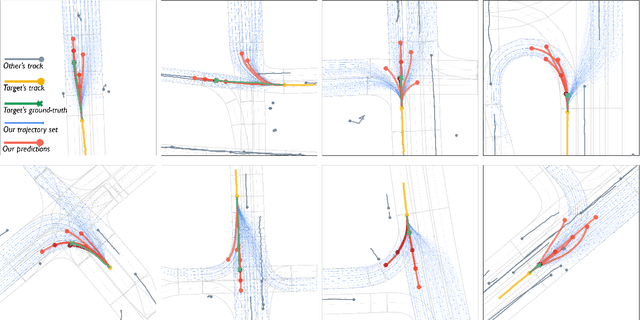
Predicting the future trajectories of on-road vehicles is critical for autonomous driving. In this paper, we introduce a novel prediction framework called PRIME, which stands for Prediction with Model-based Planning. Unlike recent prediction works that utilize neural networks to model scene context and produce unconstrained trajectories, PRIME is designed to generate accurate and feasibility-guaranteed future trajectory predictions, which guarantees the trajectory feasibility by exploiting a model-based generator to produce future trajectories under explicit constraints and enables accurate multimodal prediction by using a learning-based evaluator to select future trajectories. We conduct experiments on the large-scale Argoverse Motion Forecasting Benchmark. Our PRIME outperforms state-of-the-art methods in prediction accuracy, feasibility, and robustness under imperfect tracking. Furthermore, we achieve the 1st place on the Argoervese Leaderboard.