 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-world Semantic Segmentation for LIDAR Point Clouds
Paper and Code
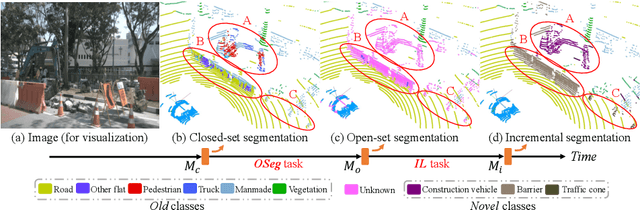
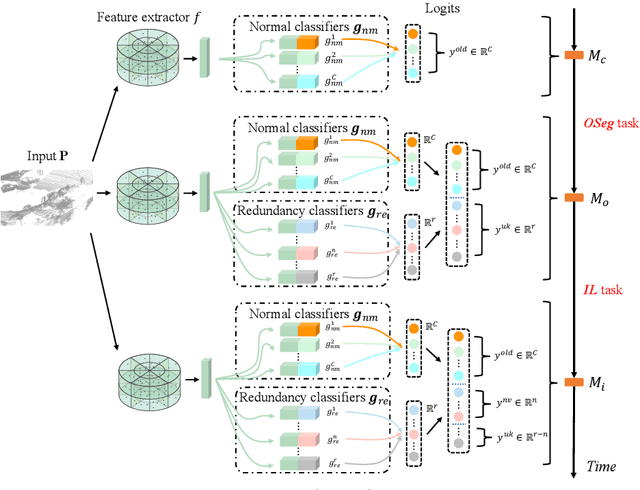
Current methods for LIDAR semantic segmentation are not robust enough for real-world applications, e.g., autonomous driving, since it is closed-set and static. The closed-set assumption makes the network only able to output labels of trained classes, even for objects never seen before, while a static network cannot update its knowledge base according to what it has seen. Therefore, in this work, we propose the open-world semantic segmentation task for LIDAR point clouds, which aims to 1) identify both old and novel classes using open-set semantic segmentation, and 2) gradually incorporate novel objects into the existing knowledge base using incremental learning without forgetting old classes. For this purpose, we propose a REdundAncy cLassifier (REAL) framework to provide a general architecture for both the open-set semantic segmentation and incremental learning problems. The experimental results show that REAL can simultaneously achieves state-of-the-art performance in the open-set semantic segmentation task on the SemanticKITTI and nuScenes datasets, and alleviate the catastrophic forgetting problem with a large margin during incremental learning.