 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Predict Vehicle Trajectories with Model-based Planning
Paper and Code
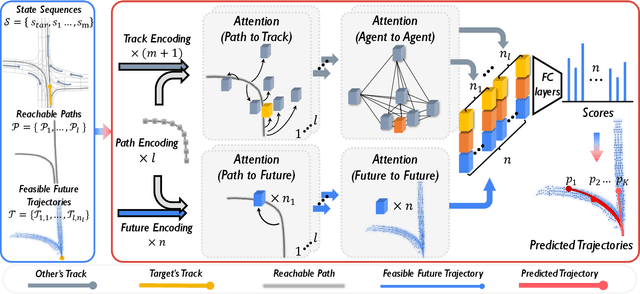
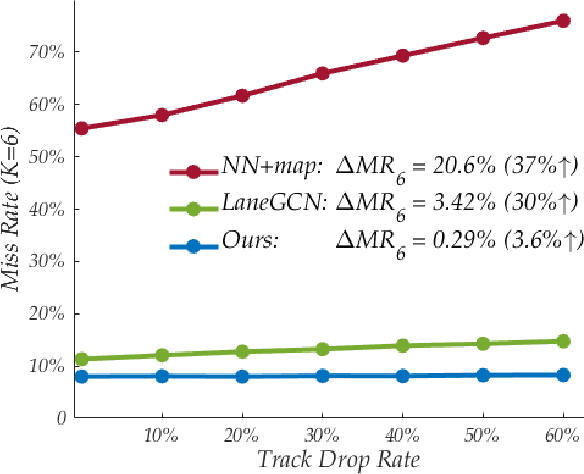
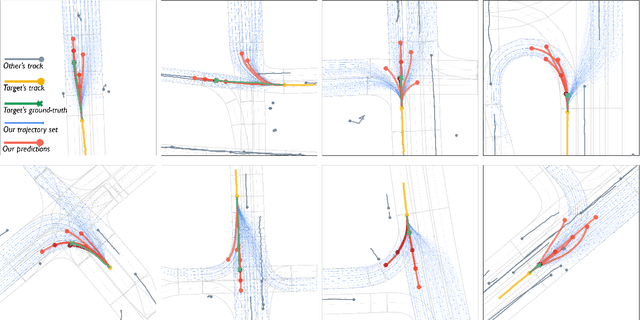
Predicting the future trajectories of on-road vehicles is critical for autonomous driving. In this paper, we introduce a novel prediction framework called PRIME, which stands for Prediction with Model-based Planning. Unlike recent prediction works that utilize neural networks to model scene context and produce unconstrained trajectories, PRIME is designed to generate accurate and feasibility-guaranteed future trajectory predictions, which guarantees the trajectory feasibility by exploiting a model-based generator to produce future trajectories under explicit constraints and enables accurate multimodal prediction by using a learning-based evaluator to select future trajectories. We conduct experiments on the large-scale Argoverse Motion Forecasting Benchmark. Our PRIME outperforms state-of-the-art methods in prediction accuracy, feasibility, and robustness under imperfect tracking. Furthermore, we achieve the 1st place on the Argoervese Leaderboard.