 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Predict Vehicle Trajectories with Model-based Planning
Mar 06, 2021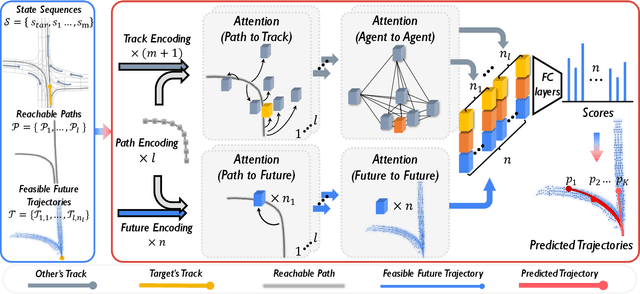
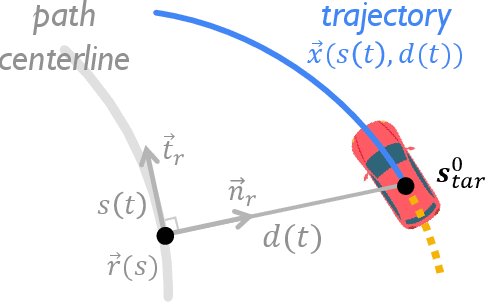
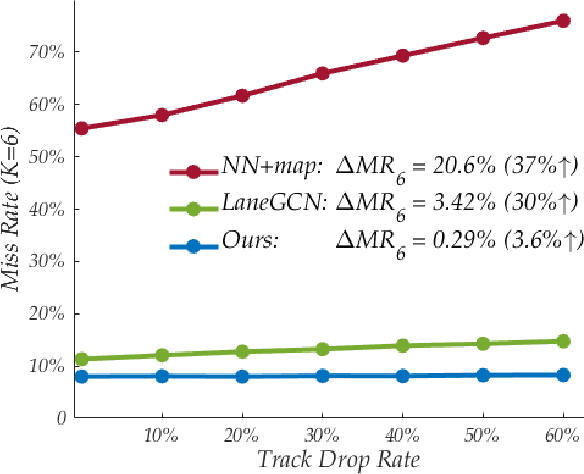
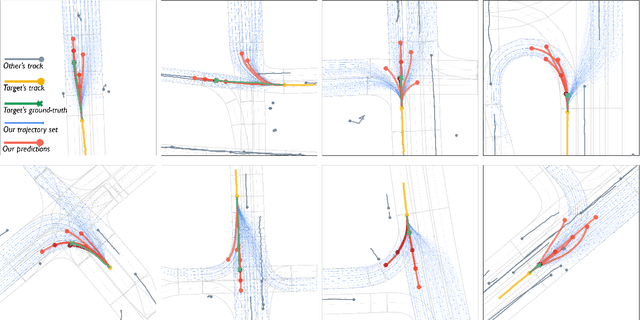
Predicting the future trajectories of on-road vehicles is critical for autonomous driving. In this paper, we introduce a novel prediction framework called PRIME, which stands for Prediction with Model-based Planning. Unlike recent prediction works that utilize neural networks to model scene context and produce unconstrained trajectories, PRIME is designed to generate accurate and feasibility-guaranteed future trajectory predictions, which guarantees the trajectory feasibility by exploiting a model-based generator to produce future trajectories under explicit constraints and enables accurate multimodal prediction by using a learning-based evaluator to select future trajectories. We conduct experiments on the large-scale Argoverse Motion Forecasting Benchmark. Our PRIME outperforms state-of-the-art methods in prediction accuracy, feasibility, and robustness under imperfect tracking. Furthermore, we achieve the 1st place on the Argoervese Leaderboard.
PiP: Planning-informed Trajectory Prediction for Autonomous Driving
Mar 25, 2020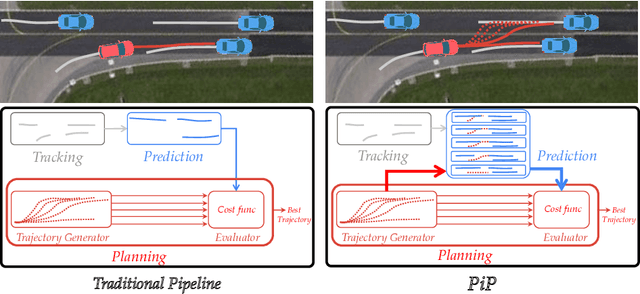
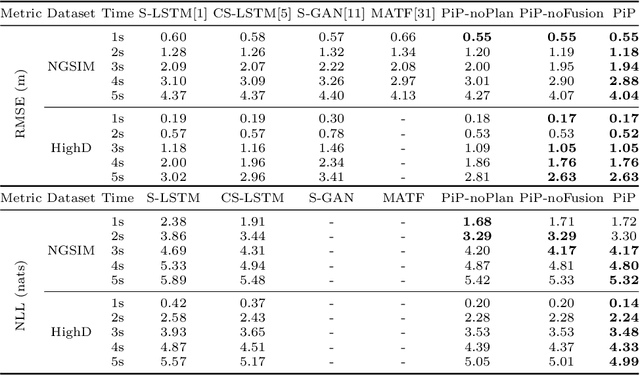
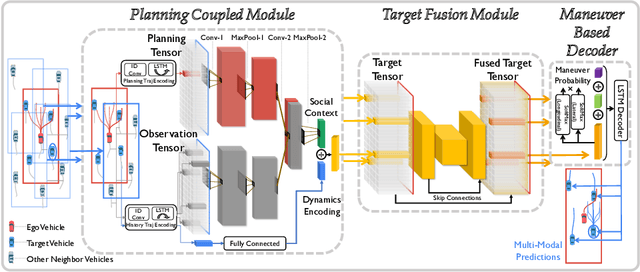
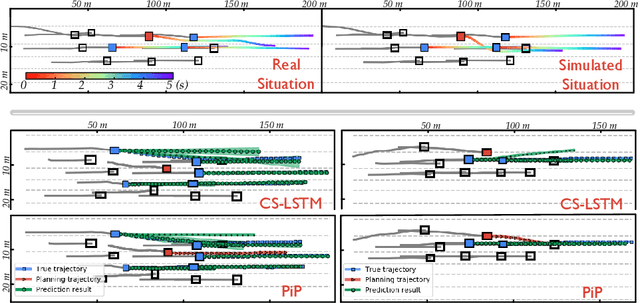
It is critical to predict the motion of surrounding vehicles for self-driving planning, especially in a socially compliant and flexible way. However, future prediction is challenging due to the interaction and uncertainty in driving behaviors. We propose planning-informed trajectory prediction (PiP) to tackle the prediction problem in the multi-agent setting. Our approach is differentiated from the traditional manner of prediction, which is only based on historical information and decoupled with planning. By informing the prediction process with the planning of ego vehicle, our method achieves the state-of-the-art performance of multi-agent forecasting on highway datasets. Moreover, our approach enables a novel pipeline which couples the prediction and planning, by conditioning PiP on multiple candidate trajectories of the ego vehicle, which is highly beneficial for autonomous driving in interactive scenarios.
Multi-Object Rearrangement with Monte Carlo Tree Search:A Case Study on Planar Nonprehensile Sorting
Dec 15, 2019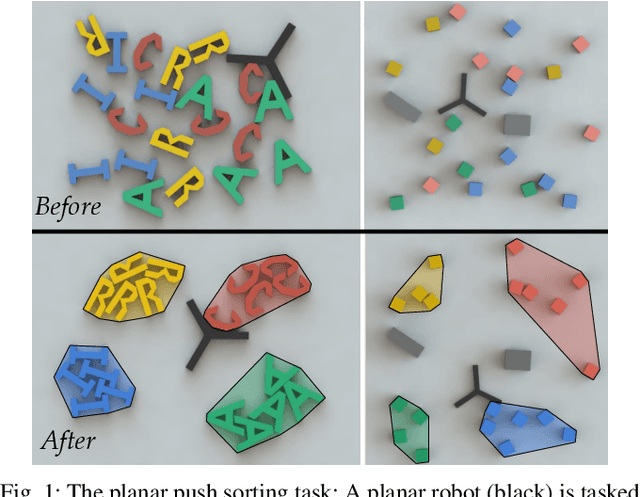
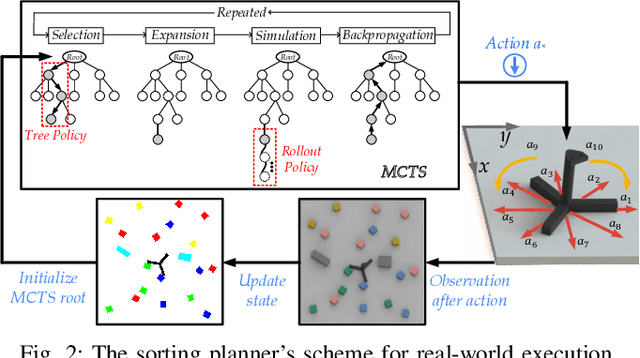

In this work, we address a planar non-prehensile sorting task. Here, a robot needs to push many densely packed objects belonging to different classes into a configuration where these classes are clearly separated from each other. To achieve this, we propose to employ Monte Carlo tree search equipped with a task-specific heuristic function. We evaluate the algorithm on various simulated sorting tasks and observe its effectiveness in reliably sorting up to 40 convex objects. In addition, we observe that the algorithm is capable to also sort non-convex objects, as well as convex objects in the presence of immovable obstacles.
Reinforcement Learning in Topology-based Representation for Human Body Movement with Whole Arm Manipulation
Sep 12, 2018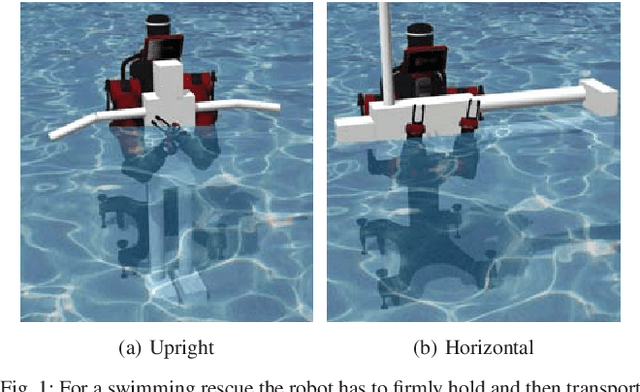
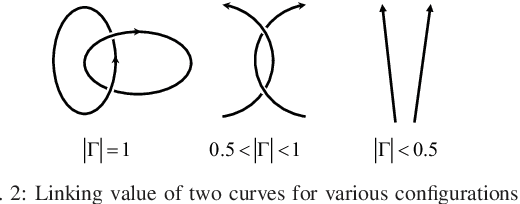
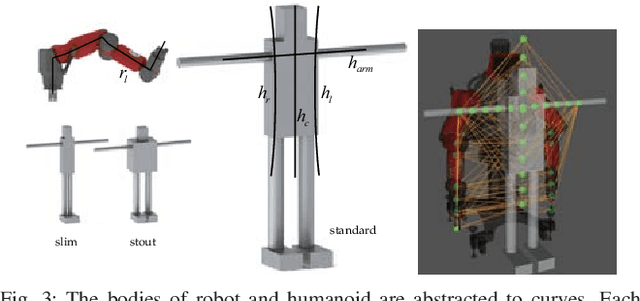
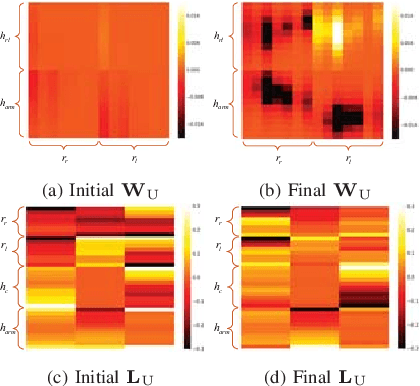
Moving a human body or a large and bulky object can require the strength of whole arm manipulation (WAM). This type of manipulation places the load on the robot's arms and relies on global properties of the interaction to succeed---rather than local contacts such as grasping or non-prehensile pushing. In this paper, we learn to generate motions that enable WAM for holding and transporting of humans in certain rescue or patient care scenarios. We model the task as a reinforcement learning problem in order to provide a behavior that can directly respond to external perturbation and human motion. For this, we represent global properties of the robot-human interaction with topology-based coordinates that are computed from arm and torso positions. These coordinates also allow transferring the learned policy to other body shapes and sizes. For training and evaluation, we simulate a dynamic sea rescue scenario and show in quantitative experiments that the policy can solve unseen scenarios with differently-shaped humans, floating humans, or with perception noise. Our qualitative experiments show the subsequent transporting after holding is achieved and we demonstrate that the policy can be directly transferred to a real world setting.