Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Rearrangement with Monte Carlo Tree Search:A Case Study on Planar Nonprehensile Sorting
Paper and Code
Dec 15, 2019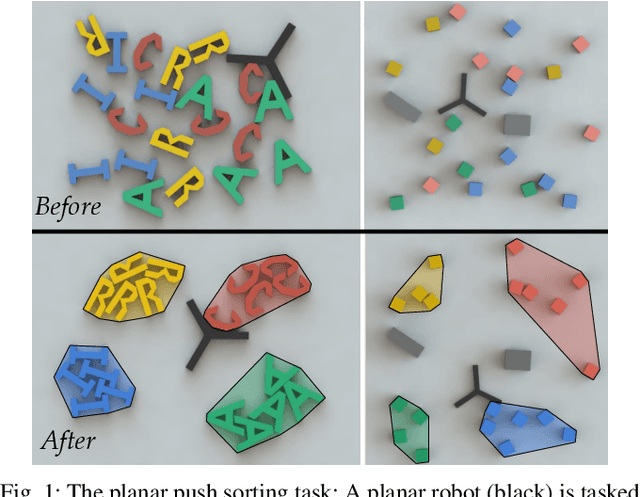
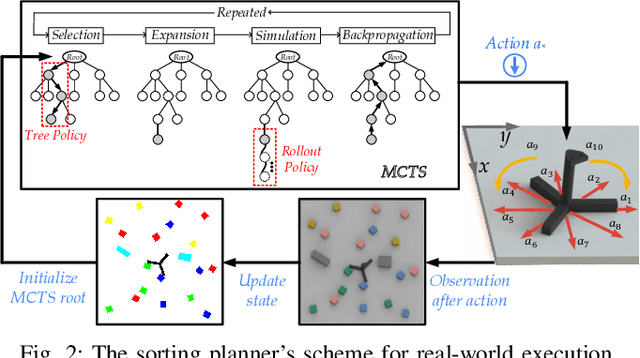

In this work, we address a planar non-prehensile sorting task. Here, a robot needs to push many densely packed objects belonging to different classes into a configuration where these classes are clearly separated from each other. To achieve this, we propose to employ Monte Carlo tree search equipped with a task-specific heuristic function. We evaluate the algorithm on various simulated sorting tasks and observe its effectiveness in reliably sorting up to 40 convex objects. In addition, we observe that the algorithm is capable to also sort non-convex objects, as well as convex objects in the presence of immovable obstacles.
* 7 pages
View paper on