 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAVE: An End-to-End Dataset for Production Autonomous Vehicle Evaluation
Nov 19, 2025Most existing autonomous-driving datasets (e.g., KITTI, nuScenes, and the Waymo Perception Dataset), collected by human-driving mode or unidentified driving mode, can only serve as early training for the perception and prediction of autonomous vehicles (AVs). To evaluate the real behavioral safety of AVs controlled in the black box, we present the first end-to-end benchmark dataset collected entirely by autonomous-driving mode in the real world. This dataset contains over 100 hours of naturalistic data from multiple production autonomous-driving vehicle models in the market. We segment the original data into 32,727 key frames, each consisting of four synchronized camera images and high-precision GNSS/IMU data (0.8 cm localization accuracy). For each key frame, 20 Hz vehicle trajectories spanning the past 6 s and future 5 s are provided, along with detailed 2D annotations of surrounding vehicles, pedestrians, traffic lights, and traffic signs. These key frames have rich scenario-level attributes, including driver intent, area type (covering highways, urban roads, and residential areas), lighting (day, night, or dusk), weather (clear or rain), road surface (paved or unpaved), traffic and vulnerable road users (VRU) density, traffic lights, and traffic signs (warning, prohibition, and indication). To evaluate the safety of AVs, we employ an end-to-end motion planning model that predicts vehicle trajectories with an Average Displacement Error (ADE) of 1.4 m on autonomous-driving frames. The dataset continues to expand by over 10 hours of new data weekly, thereby providing a sustainable foundation for research on AV driving behavior analysis and safety evaluation. The PAVE dataset is publicly available at https://hkustgz-my.sharepoint.com/:f:/g/personal/kema_hkust-gz_edu_cn/IgDXyoHKfdGnSZ3JbbidjduMAXxs-Z3NXzm005A_Ix9tr0Q?e=9HReCu.
Not Only Consistency: Enhance Test-Time Adaptation with Spatio-temporal Inconsistency for Remote Physiological Measurement
Jul 10, 2025Remote photoplethysmography (rPPG) has emerged as a promising non-invasive method for monitoring physiological signals using the camera. Although various domain adaptation and generalization methods were proposed to promote the adaptability of deep-based rPPG models in unseen deployment environments, considerations in aspects like privacy concerns and real-time adaptation restrict their application in real-world deployment. Thus, we aim to propose a novel fully Test-Time Adaptation (TTA) strategy tailored for rPPG tasks in this work. Specifically, based on prior knowledge in physiology and our observations, we noticed not only there is spatio-temporal consistency in the frequency domain of rPPG signals, but also that inconsistency in the time domain was significant. Given this, by leveraging both consistency and inconsistency priors, we introduce an innovative expert knowledge-based self-supervised \textbf{C}onsistency-\textbf{i}n\textbf{C}onsistency-\textbf{i}ntegration (\textbf{CiCi}) framework to enhances model adaptation during inference. Besides, our approach further incorporates a gradient dynamic control mechanism to mitigate potential conflicts between priors, ensuring stable adaptation across instances. Through extensive experiments on five diverse datasets under the TTA protocol, our method consistently outperforms existing techniques, presenting state-of-the-art performance in real-time self-supervised adaptation without accessing source data. The code will be released later.
Sage Deer: A Super-Aligned Driving Generalist Is Your Copilot
May 15, 2025The intelligent driving cockpit, an important part of intelligent driving, needs to match different users' comfort, interaction, and safety needs. This paper aims to build a Super-Aligned and GEneralist DRiving agent, SAGE DeeR. Sage Deer achieves three highlights: (1) Super alignment: It achieves different reactions according to different people's preferences and biases. (2) Generalist: It can understand the multi-view and multi-mode inputs to reason the user's physiological indicators, facial emotions, hand movements, body movements, driving scenarios, and behavioral decisions. (3) Self-Eliciting: It can elicit implicit thought chains in the language space to further increase generalist and super-aligned abilities. Besides, we collected multiple data sets and built a large-scale benchmark. This benchmark measures the deer's perceptual decision-making ability and the super alignment's accuracy.
STAHGNet: Modeling Hybrid-grained Heterogenous Dependency Efficiently for Traffic Prediction
Dec 23, 2024



Traffic flow prediction plays a critical role in the intelligent transportation system, and it is also a challenging task because of the underlying complex Spatio-temporal patterns and heterogeneities evolving across time. However, most present works mostly concentrate on solely capturing Spatial-temporal dependency or extracting implicit similarity graphs, but the hybrid-granularity evolution is ignored in their modeling process. In this paper, we proposed a novel data-driven end-to-end framework, named Spatio-Temporal Aware Hybrid Graph Network (STAHGNet), to couple the hybrid-grained heterogeneous correlations in series simultaneously through an elaborately Hybrid Graph Attention Module (HGAT) and Coarse-granularity Temporal Graph (CTG) generator. Furthermore, an automotive feature engineering with domain knowledge and a random neighbor sampling strategy is utilized to improve efficiency and reduce computational complexity. The MAE, RMSE, and MAPE are used for evaluation metrics. Tested on four real-life datasets, our proposal outperforms eight classical baselines and four state-of-the-art (SOTA) methods (e.g., MAE 14.82 on PeMSD3; MAE 18.92 on PeMSD4). Besides, extensive experiments and visualizations verify the effectiveness of each component in STAHGNet. In terms of computational cost, STAHGNet saves at least four times the space compared to the previous SOTA models. The proposed model will be beneficial for more efficient TFP as well as intelligent transport system construction.
Efficient Mixture-of-Expert for Video-based Driver State and Physiological Multi-task Estimation in Conditional Autonomous Driving
Oct 28, 2024



Road safety remains a critical challenge worldwide, with approximately 1.35 million fatalities annually attributed to traffic accidents, often due to human errors. As we advance towards higher levels of vehicle automation, challenges still exist, as driving with automation can cognitively over-demand drivers if they engage in non-driving-related tasks (NDRTs), or lead to drowsiness if driving was the sole task. This calls for the urgent need for an effective Driver Monitoring System (DMS) that can evaluate cognitive load and drowsiness in SAE Level-2/3 autonomous driving contexts. In this study, we propose a novel multi-task DMS, termed VDMoE, which leverages RGB video input to monitor driver states non-invasively. By utilizing key facial features to minimize computational load and integrating remote Photoplethysmography (rPPG) for physiological insights, our approach enhances detection accuracy while maintaining efficiency. Additionally, we optimize the Mixture-of-Experts (MoE) framework to accommodate multi-modal inputs and improve performance across different tasks. A novel prior-inclusive regularization method is introduced to align model outputs with statistical priors, thus accelerating convergence and mitigating overfitting risks. We validate our method with the creation of a new dataset (MCDD), which comprises RGB video and physiological indicators from 42 participants, and two public datasets. Our findings demonstrate the effectiveness of VDMoE in monitoring driver states, contributing to safer autonomous driving systems. The code and data will be released.
PhysMLE: Generalizable and Priors-Inclusive Multi-task Remote Physiological Measurement
May 10, 2024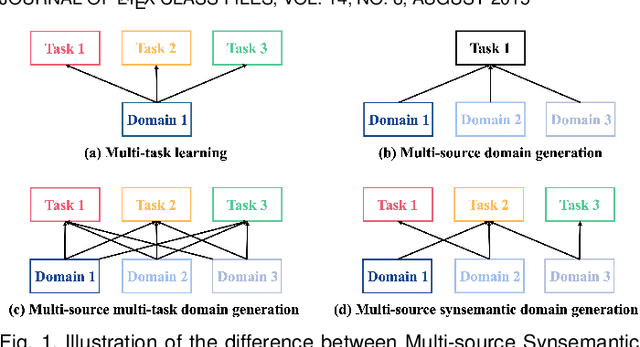
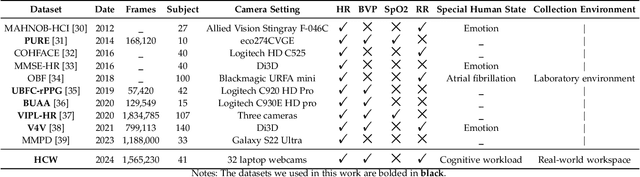
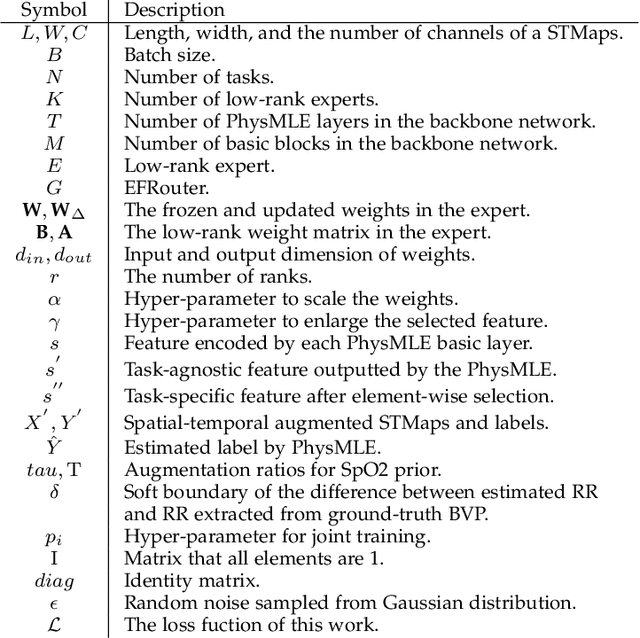
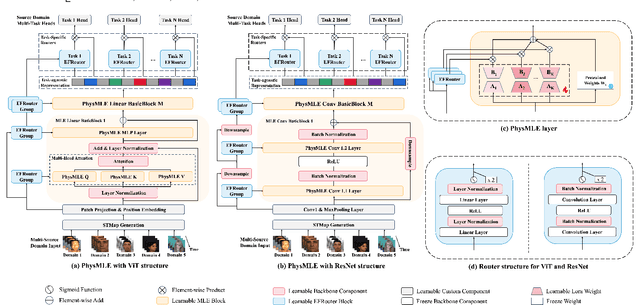
Remote photoplethysmography (rPPG) has been widely applied to measure heart rate from face videos. To increase the generalizability of the algorithms, domain generalization (DG) attracted increasing attention in rPPG. However, when rPPG is extended to simultaneously measure more vital signs (e.g., respiration and blood oxygen saturation), achieving generalizability brings new challenges. Although partial features shared among different physiological signals can benefit multi-task learning, the sparse and imbalanced target label space brings the seesaw effect over task-specific feature learning. To resolve this problem, we designed an end-to-end Mixture of Low-rank Experts for multi-task remote Physiological measurement (PhysMLE), which is based on multiple low-rank experts with a novel router mechanism, thereby enabling the model to adeptly handle both specifications and correlations within tasks. Additionally, we introduced prior knowledge from physiology among tasks to overcome the imbalance of label space under real-world multi-task physiological measurement. For fair and comprehensive evaluations, this paper proposed a large-scale multi-task generalization benchmark, named Multi-Source Synsemantic Domain Generalization (MSSDG) protocol. Extensive experiments with MSSDG and intra-dataset have shown the effectiveness and efficiency of PhysMLE. In addition, a new dataset was collected and made publicly available to meet the needs of the MSSDG.
GPT as Psychologist? Preliminary Evaluations for GPT-4V on Visual Affective Computing
Mar 09, 2024

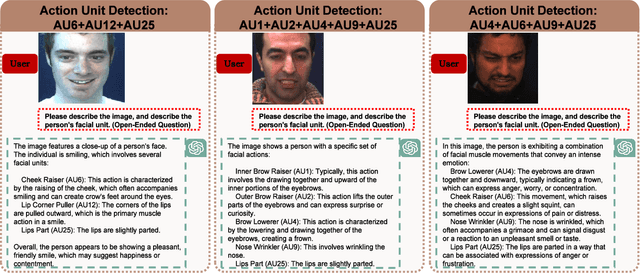
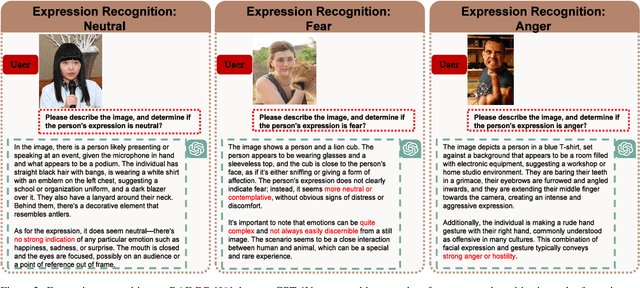
Multimodal language models (MLMs) are designed to process and integrate information from multiple sources, such as text, speech, images, and videos. Despite its success in language understanding, it is critical to evaluate the performance of downstream tasks for better human-centric applications. This paper assesses the application of MLMs with 5 crucial abilities for affective computing, spanning from visual affective tasks and reasoning tasks. The results show that GPT4 has high accuracy in facial action unit recognition and micro-expression detection while its general facial expression recognition performance is not accurate. We also highlight the challenges of achieving fine-grained micro-expression recognition and the potential for further study and demonstrate the versatility and potential of GPT4 for handling advanced tasks in emotion recognition and related fields by integrating with task-related agents for more complex tasks, such as heart rate estimation through signal processing. In conclusion, this paper provides valuable insights into the potential applications and challenges of MLMs in human-centric computing. The interesting samples are available at \url{https://github.com/LuPaoPao/GPT4Affectivity}.
Evaluation and Control Model Design of Human Factors for Autonomous Driving Systems
Jul 03, 2023With the fast development of driving automation technologies, user psychological acceptance of driving automation has become one of the major obstacles to the adoption of the driving automation technology. The most basic function of a passenger car is to transport passengers or drivers to their destinations safely and comfortably. Thus, the design of the driving automation should not just guarantee the safety of vehicle operation but also ensure occupant subjective level of comfort. Hence this paper proposes a local path planning algorithm for obstacle avoidance with occupant subjective feelings considered. Firstly, turning and obstacle avoidance conditions are designed, and four classifiers in machine learning are used to respectively establish subjective and objective evaluation models that link the objective vehicle dynamics parameters and occupant subjective confidence. Then, two potential fields are established based on the artificial potential field, reflecting the psychological feeling of drivers on obstacles and road boundaries. Accordingly, a path planning algorithm and a path tracking algorithm are designed respectively based on model predictive control, and the psychological safety boundary and the optimal classifier are used as part of cost functions. Finally, co-simulations of MATLAB/Simulink and CarSim are carried out. The results confirm the effectiveness of the proposed control algorithm, which can avoid obstacles satisfactorily and improve the psychological feeling of occupants effectively.