 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Scale Self-Supervised Channel Charting with Sensor Fusion
May 07, 2024The sensing and positioning capabilities foreseen in 6G have great potential for technology advancements in various domains, such as future smart cities and industrial use cases. Channel charting has emerged as a promising technology in recent years for radio frequency-based sensing and localization. However, the accuracy of these techniques is yet far behind the numbers envisioned in 6G. To reduce this gap, in this paper, we propose a novel channel charting technique capitalizing on the time of arrival measurements from surrounding Transmission Reception Points (TRPs) along with their locations and leveraging sensor fusion in channel charting by incorporating laser scanner data during the training phase of our algorithm. The proposed algorithm remains self-supervised during training and test phases, requiring no geometrical models or user position ground truth. Simulation results validate the achievement of a sub-meter level localization accuracy using our algorithm 90% of the time, outperforming the state-of-the-art channel charting techniques and the traditional triangulation-based approaches.
Sparser Random Networks Exist: Enforcing Communication-Efficient Federated Learning via Regularization
Sep 19, 2023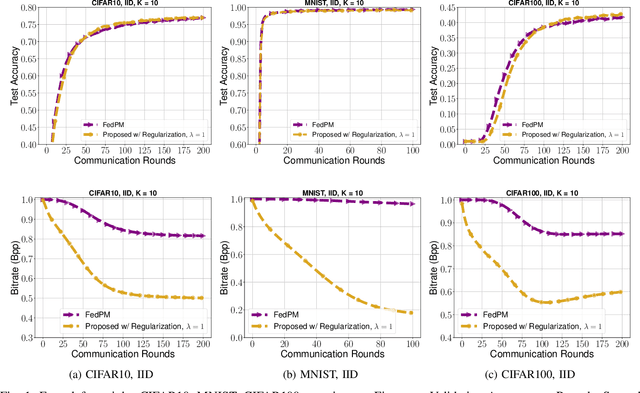
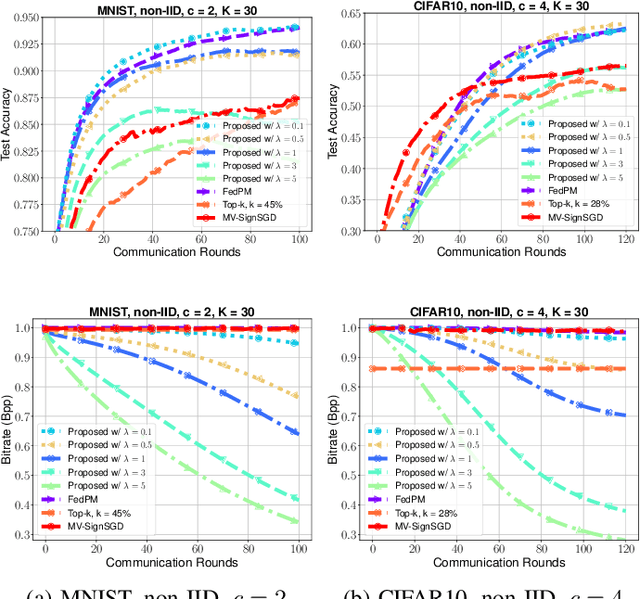
This work presents a new method for enhancing communication efficiency in stochastic Federated Learning that trains over-parameterized random networks. In this setting, a binary mask is optimized instead of the model weights, which are kept fixed. The mask characterizes a sparse sub-network that is able to generalize as good as a smaller target network. Importantly, sparse binary masks are exchanged rather than the floating point weights in traditional federated learning, reducing communication cost to at most 1 bit per parameter. We show that previous state of the art stochastic methods fail to find the sparse networks that can reduce the communication and storage overhead using consistent loss objectives. To address this, we propose adding a regularization term to local objectives that encourages sparser solutions by eliminating redundant features across sub-networks. Extensive experiments demonstrate significant improvements in communication and memory efficiency of up to five magnitudes compared to the literature, with minimal performance degradation in validation accuracy in some instances.
A Tutorial on Environment-Aware Communications via Channel Knowledge Map for 6G
Sep 14, 2023Sixth-generation (6G) mobile communication networks are expected to have dense infrastructures, large-dimensional channels, cost-effective hardware, diversified positioning methods, and enhanced intelligence. Such trends bring both new challenges and opportunities for the practical design of 6G. On one hand, acquiring channel state information (CSI) in real time for all wireless links becomes quite challenging in 6G. On the other hand, there would be numerous data sources in 6G containing high-quality location-tagged channel data, making it possible to better learn the local wireless environment. By exploiting such new opportunities and for tackling the CSI acquisition challenge, there is a promising paradigm shift from the conventional environment-unaware communications to the new environment-aware communications based on the novel approach of channel knowledge map (CKM). This article aims to provide a comprehensive tutorial overview on environment-aware communications enabled by CKM to fully harness its benefits for 6G. First, the basic concept of CKM is presented, and a comparison of CKM with various existing channel inference techniques is discussed. Next, the main techniques for CKM construction are discussed, including both the model-free and model-assisted approaches. Furthermore, a general framework is presented for the utilization of CKM to achieve environment-aware communications, followed by some typical CKM-aided communication scenarios. Finally, important open problems in CKM research are highlighted and potential solutions are discussed to inspire future work.
Model-aided Federated Reinforcement Learning for Multi-UAV Trajectory Planning in IoT Networks
Jun 03, 2023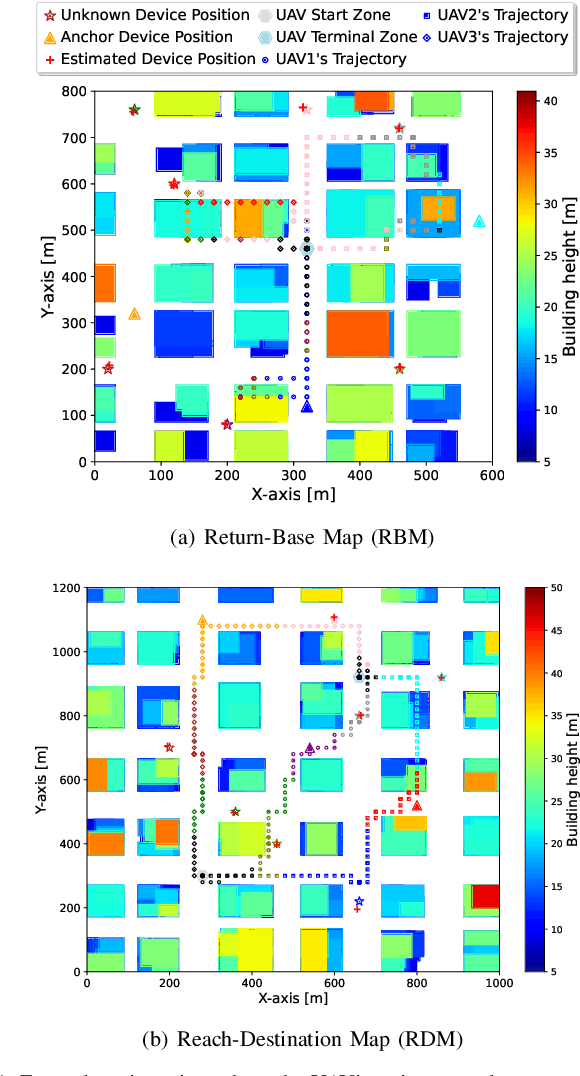
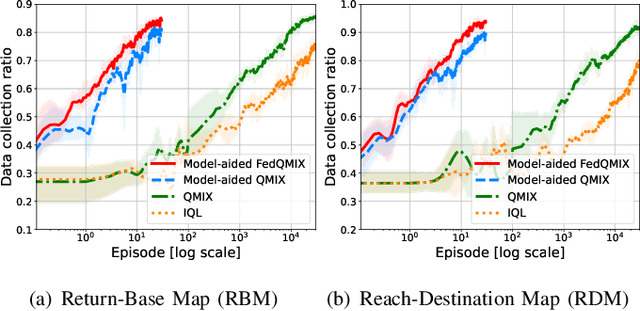
Deploying teams of cooperative unmanned aerial vehicles (UAVs) to harvest data from distributed Internet of Things (IoT) devices requires efficient trajectory planning and coordination algorithms. Multi-agent reinforcement learning (MARL) has emerged as an effective solution, but often requires extensive and costly real-world training data. In this paper, we propose a novel model-aided federated MARL algorithm to coordinate multiple UAVs on a data harvesting mission with limited knowledge about the environment, significantly reducing the real-world training data demand. The proposed algorithm alternates between learning an environment model from real-world measurements and federated QMIX training in the simulated environment. Specifically, collected measurements from the real-world environment are used to learn the radio channel and estimate unknown IoT device locations to create a simulated environment. Each UAV agent trains a local QMIX model in its simulated environment and continuously consolidates it through federated learning with other agents, accelerating the learning process and further improving training sample efficiency. Simulation results demonstrate that our proposed model-aided FedQMIX algorithm substantially reduces the need for real-world training experiences while attaining similar data collection performance as standard MARL algorithms.
Revisiting Matching Pursuit: Beyond Approximate Submodularity
May 12, 2023



We study the problem of selecting a subset of vectors from a large set, to obtain the best signal representation over a family of functions. Although greedy methods have been widely used for tackling this problem and many of those have been analyzed under the lens of (weak) submodularity, none of these algorithms are explicitly devised using such a functional property. Here, we revisit the vector-selection problem and introduce a function which is shown to be submodular in expectation. This function does not only guarantee near-optimality through a greedy algorithm in expectation, but also alleviates the existing deficiencies in commonly used matching pursuit (MP) algorithms. We further show the relation between the single-point-estimate version of the proposed greedy algorithm and MP variants. Our theoretical results are supported by numerical experiments for the angle of arrival estimation problem, a typical signal representation task; the experiments demonstrate the benefits of the proposed method with respect to the traditional MP algorithms.
Integrated Access and Backhaul in 5G with Aerial Distributed Unit using OpenAirInterface
May 11, 2023In this work, we demonstrate the Integrated Access and Backhaul (IAB) capabilities of an aerial robot offering 5G connectivity to ground users. The robot is integrated with a distributed unit (DU) and has 5G wireless backhaul access to a terrestrial central unit (CU). The CU-DU interface fully complies with the 3GPP defined F1 application protocol (F1AP). Such aerial robots can be instantiated and configured dynamically tailoring to the network demands. The complete radio and access network solution is based on open-source software from OpenAirInterface, and off-the-shelf commercial 5G mobile terminals. Experimental results illustrate throughput gains, coverage extension and dynamic adaptability nature of the aerial DU.
User-Centric Federated Learning: Trading off Wireless Resources for Personalization
Apr 25, 2023Statistical heterogeneity across clients in a Federated Learning (FL) system increases the algorithm convergence time and reduces the generalization performance, resulting in a large communication overhead in return for a poor model. To tackle the above problems without violating the privacy constraints that FL imposes, personalized FL methods have to couple statistically similar clients without directly accessing their data in order to guarantee a privacy-preserving transfer. In this work, we design user-centric aggregation rules at the parameter server (PS) that are based on readily available gradient information and are capable of producing personalized models for each FL client. The proposed aggregation rules are inspired by an upper bound of the weighted aggregate empirical risk minimizer. Secondly, we derive a communication-efficient variant based on user clustering which greatly enhances its applicability to communication-constrained systems. Our algorithm outperforms popular personalized FL baselines in terms of average accuracy, worst node performance, and training communication overhead.
A Novel Metric for mMIMO Base Station Association for Aerial Highway Systems
Mar 24, 2023In this article, we introduce a new metric for driving the serving cell selection process of a swarm of cellular connected unmanned aerial vehicles (CCUAVs) located on aerial highways when served by a massive multiple input multiple output (mMIMO) terrestrial network. Selecting the optimal serving cell from several suitable candidates is not straightforward. By solely relying on the traditional cell selection metric, based on reference signal received power (RSRP), it is possible to result in a scenario in which the serving cell can not multiplex an appropriate number of CCUAVs due to the high correlation in the line of sight (LoS) channels. To overcome such issue, in this work, we introduce a new cell selection metric to capture not only signal strength, but also spatial multiplexing capabilities. The proposed metric highly depends on the relative position between the aerial highways and the antennas of the base station. The numerical analysis indicates that the integration of the proposed new metric allows to have a better signal to interference plus noise ratio (SINR) performance on the aerial highways, resulting in a more reliable cellular connection for CCUAVs.
Team Precoding Towards Scalable Cell-free Massive MIMO Networks
Aug 24, 2022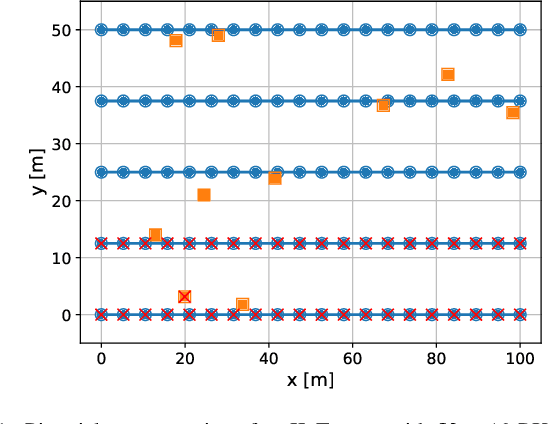
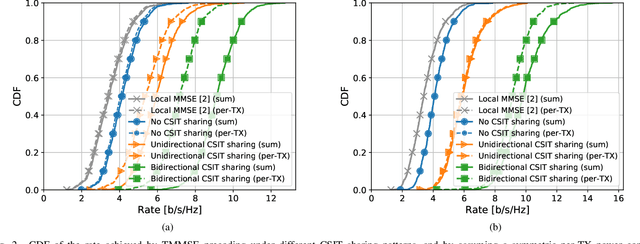
In a recent work, we studied a novel precoding design for cell-free networks called team minimum mean-square error (TMMSE) precoding, which rigorously generalizes centralized MMSE precoding to distributed operations based on transmitter-specific channel state information (CSI). Despite its flexibility in handling different cooperation regimes at the CSI sharing level, TMMSE precoding assumes network-wide sharing of the data bearing signals, and hence it is inherently not scalable. In this work, inspired by recent advances on scalable cell-free architectures based on user-centric network clustering techniques, we address this issue by proposing a novel version of the TMMSE precoding design covering partial message sharing. The obtained framework is then successfully applied to derive a variety of novel, optimal, and efficient precoding schemes for a user-centric cell-free network deployed using multiple radio stripes. Numerical simulations of a typical industrial internet-of-things scenario corroborate the gains of TMMSE precoding over competing schemes in terms of spectral efficiency under different power constraints. Although presented in the context of downlink precoding, the results of this paper may be applied also on the uplink.
Robust Bayesian Learning for Reliable Wireless AI: Framework and Applications
Jul 01, 2022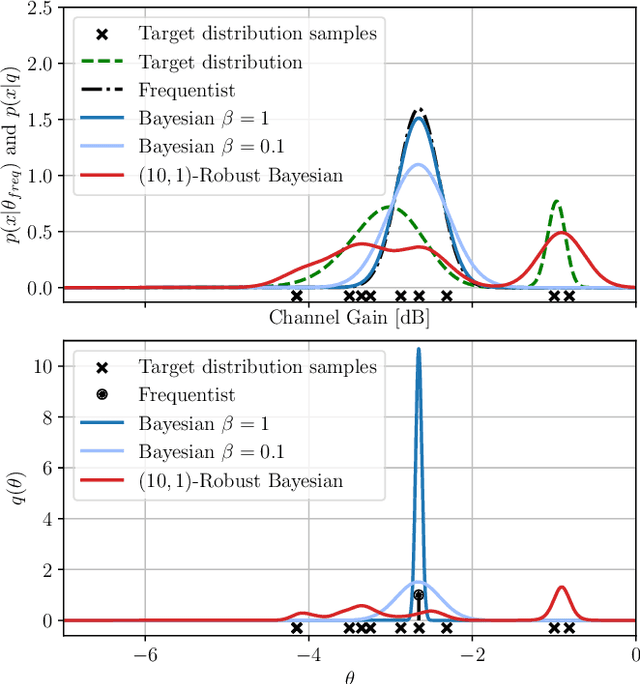
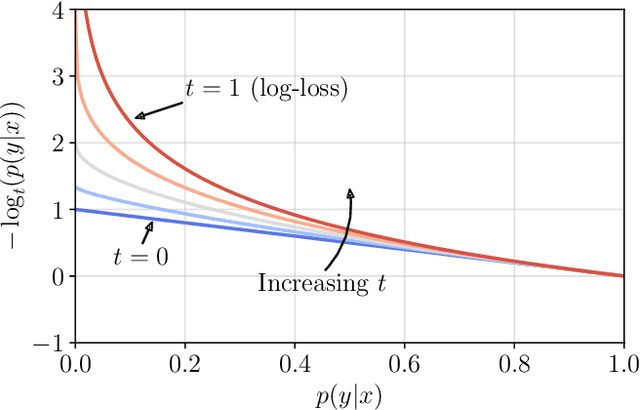
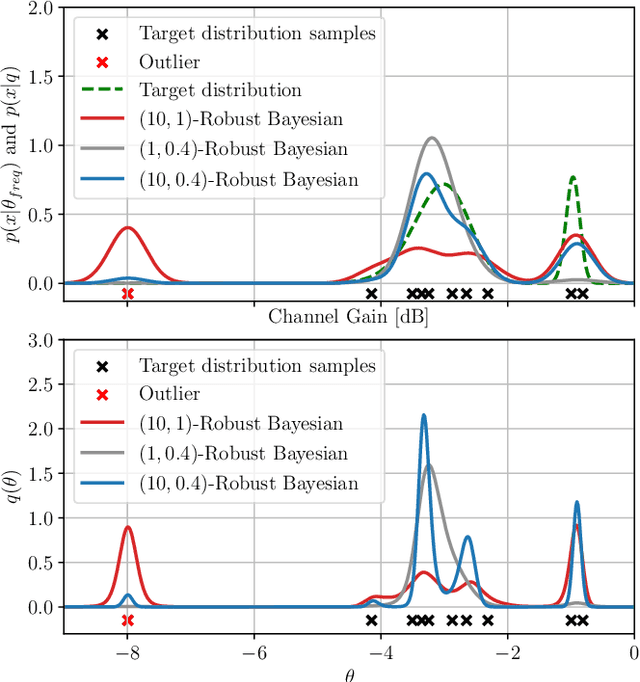

This work takes a critical look at the application of conventional machine learning methods to wireless communication problems through the lens of reliability and robustness. Deep learning techniques adopt a frequentist framework, and are known to provide poorly calibrated decisions that do not reproduce the true uncertainty caused by limitations in the size of the training data. Bayesian learning, while in principle capable of addressing this shortcoming, is in practice impaired by model misspecification and by the presence of outliers. Both problems are pervasive in wireless communication settings, in which the capacity of machine learning models is subject to resource constraints and training data is affected by noise and interference. In this context, we explore the application of the framework of robust Bayesian learning. After a tutorial-style introduction to robust Bayesian learning, we showcase the merits of robust Bayesian learning on several important wireless communication problems in terms of accuracy, calibration, and robustness to outliers and misspecification.