 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Energy and Data Collection in UAV-aided IoT Networks using Attention-based Multi-Objective Reinforcement Learning
Jan 20, 2026Due to their adaptability and mobility, Unmanned Aerial Vehicles (UAVs) are becoming increasingly essential for wireless network services, particularly for data harvesting tasks. In this context, Artificial Intelligence (AI)-based approaches have gained significant attention for addressing UAV path planning tasks in large and complex environments, bridging the gap with real-world deployments. However, many existing algorithms suffer from limited training data, which hampers their performance in highly dynamic environments. Moreover, they often overlook the inherently multi-objective nature of the task, treating it in an overly simplistic manner. To address these limitations, we propose an attention-based Multi-Objective Reinforcement Learning (MORL) architecture that explicitly handles the trade-off between data collection and energy consumption in urban environments, even without prior knowledge of wireless channel conditions. Our method develops a single model capable of adapting to varying trade-off preferences and dynamic scenario parameters without the need for fine-tuning or retraining. Extensive simulations show that our approach achieves substantial improvements in performance, model compactness, sample efficiency, and most importantly, generalization to previously unseen scenarios, outperforming existing RL solutions.
Global Scale Self-Supervised Channel Charting with Sensor Fusion
May 07, 2024The sensing and positioning capabilities foreseen in 6G have great potential for technology advancements in various domains, such as future smart cities and industrial use cases. Channel charting has emerged as a promising technology in recent years for radio frequency-based sensing and localization. However, the accuracy of these techniques is yet far behind the numbers envisioned in 6G. To reduce this gap, in this paper, we propose a novel channel charting technique capitalizing on the time of arrival measurements from surrounding Transmission Reception Points (TRPs) along with their locations and leveraging sensor fusion in channel charting by incorporating laser scanner data during the training phase of our algorithm. The proposed algorithm remains self-supervised during training and test phases, requiring no geometrical models or user position ground truth. Simulation results validate the achievement of a sub-meter level localization accuracy using our algorithm 90% of the time, outperforming the state-of-the-art channel charting techniques and the traditional triangulation-based approaches.
Sparser Random Networks Exist: Enforcing Communication-Efficient Federated Learning via Regularization
Sep 19, 2023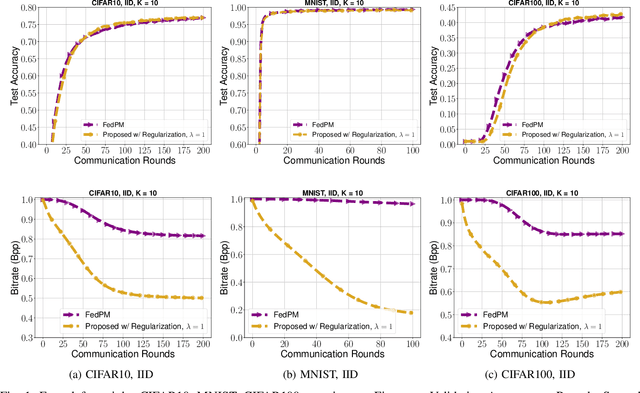
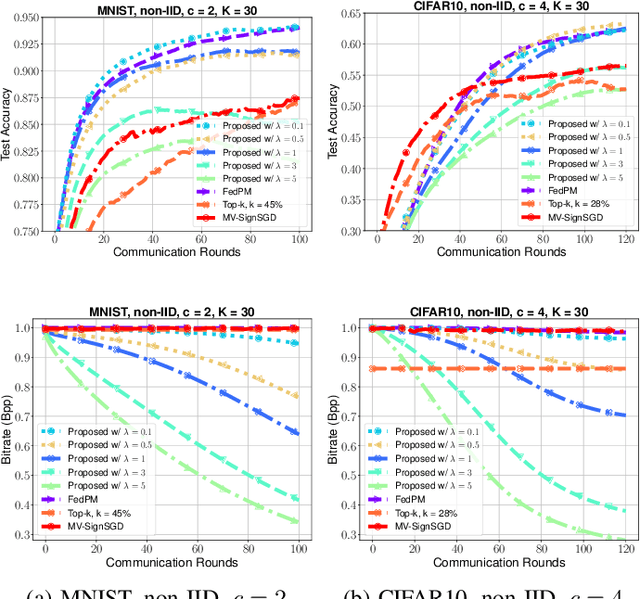
This work presents a new method for enhancing communication efficiency in stochastic Federated Learning that trains over-parameterized random networks. In this setting, a binary mask is optimized instead of the model weights, which are kept fixed. The mask characterizes a sparse sub-network that is able to generalize as good as a smaller target network. Importantly, sparse binary masks are exchanged rather than the floating point weights in traditional federated learning, reducing communication cost to at most 1 bit per parameter. We show that previous state of the art stochastic methods fail to find the sparse networks that can reduce the communication and storage overhead using consistent loss objectives. To address this, we propose adding a regularization term to local objectives that encourages sparser solutions by eliminating redundant features across sub-networks. Extensive experiments demonstrate significant improvements in communication and memory efficiency of up to five magnitudes compared to the literature, with minimal performance degradation in validation accuracy in some instances.
Model-aided Federated Reinforcement Learning for Multi-UAV Trajectory Planning in IoT Networks
Jun 03, 2023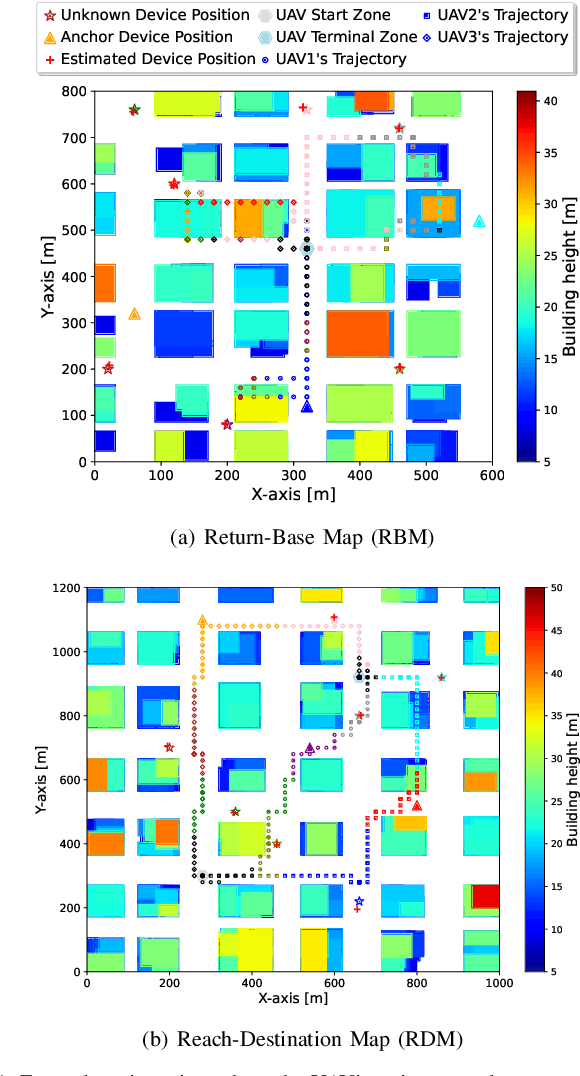
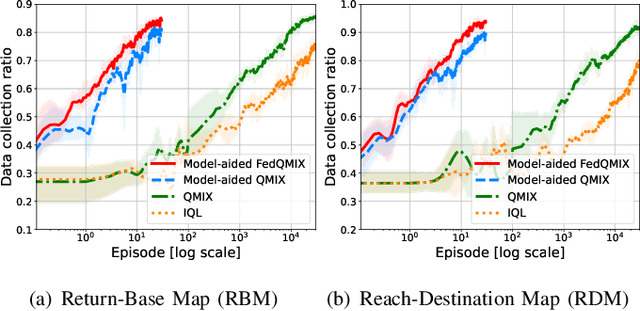
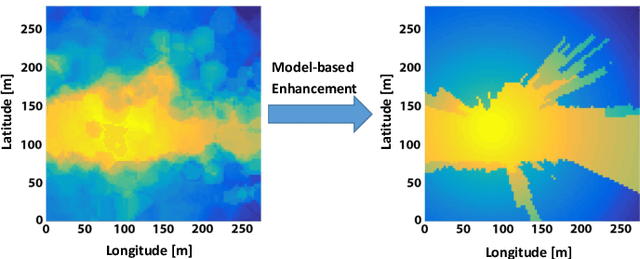
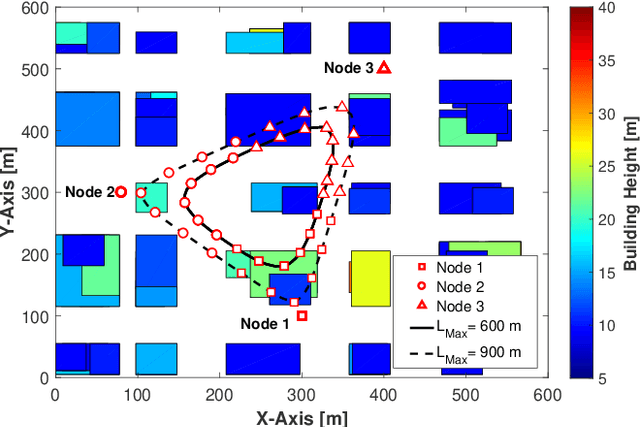
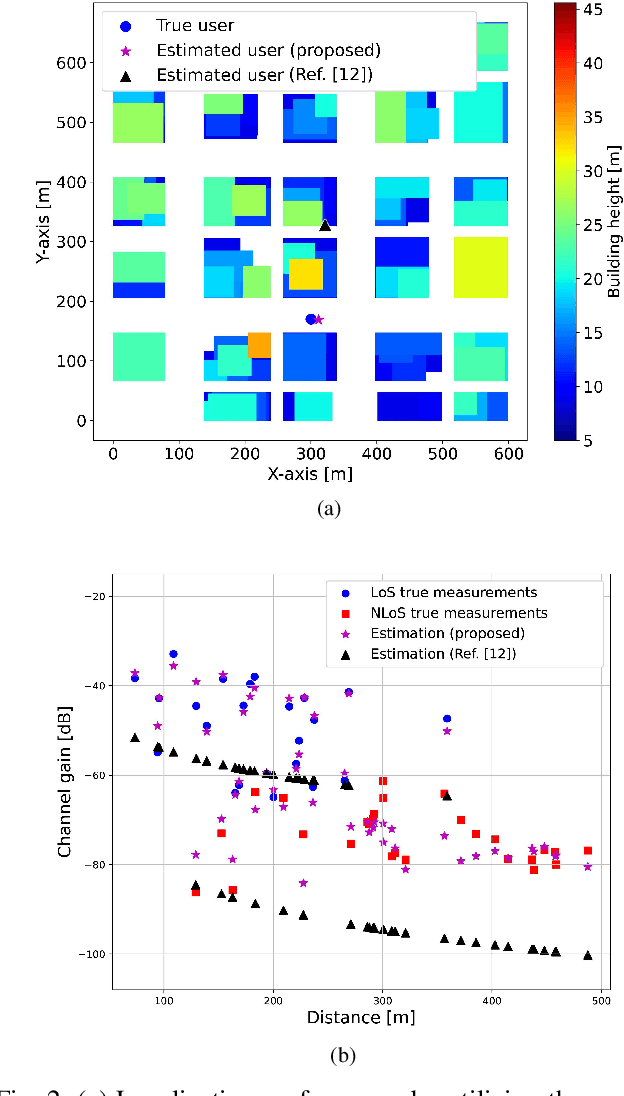
Deploying teams of cooperative unmanned aerial vehicles (UAVs) to harvest data from distributed Internet of Things (IoT) devices requires efficient trajectory planning and coordination algorithms. Multi-agent reinforcement learning (MARL) has emerged as an effective solution, but often requires extensive and costly real-world training data. In this paper, we propose a novel model-aided federated MARL algorithm to coordinate multiple UAVs on a data harvesting mission with limited knowledge about the environment, significantly reducing the real-world training data demand. The proposed algorithm alternates between learning an environment model from real-world measurements and federated QMIX training in the simulated environment. Specifically, collected measurements from the real-world environment are used to learn the radio channel and estimate unknown IoT device locations to create a simulated environment. Each UAV agent trains a local QMIX model in its simulated environment and continuously consolidates it through federated learning with other agents, accelerating the learning process and further improving training sample efficiency. Simulation results demonstrate that our proposed model-aided FedQMIX algorithm substantially reduces the need for real-world training experiences while attaining similar data collection performance as standard MARL algorithms.
Integrated Access and Backhaul in 5G with Aerial Distributed Unit using OpenAirInterface
May 11, 2023In this work, we demonstrate the Integrated Access and Backhaul (IAB) capabilities of an aerial robot offering 5G connectivity to ground users. The robot is integrated with a distributed unit (DU) and has 5G wireless backhaul access to a terrestrial central unit (CU). The CU-DU interface fully complies with the 3GPP defined F1 application protocol (F1AP). Such aerial robots can be instantiated and configured dynamically tailoring to the network demands. The complete radio and access network solution is based on open-source software from OpenAirInterface, and off-the-shelf commercial 5G mobile terminals. Experimental results illustrate throughput gains, coverage extension and dynamic adaptability nature of the aerial DU.
UAV-Aided Multi-Community Federated Learning
Jun 04, 2022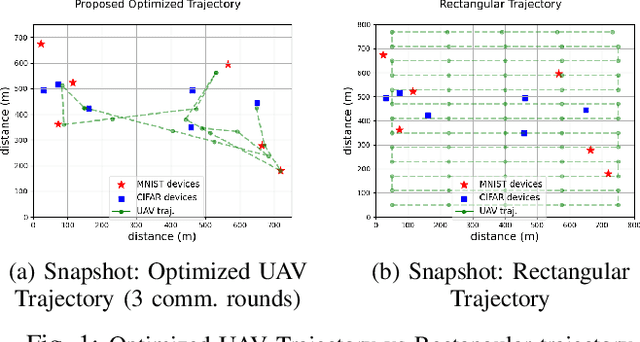
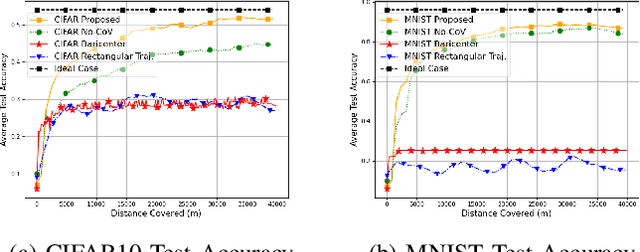
In this work, we investigate the problem of an online trajectory design for an Unmanned Aerial Vehicle (UAV) in a Federated Learning (FL) setting where several different communities exist, each defined by a unique task to be learned. In this setting, spatially distributed devices belonging to each community collaboratively contribute towards training their community model via wireless links provided by the UAV. Accordingly, the UAV acts as a mobile orchestrator coordinating the transmissions and the learning schedule among the devices in each community, intending to accelerate the learning process of all tasks. We propose a heuristic metric as a proxy for the training performance of the different tasks. Capitalizing on this metric, a surrogate objective is defined which enables us to jointly optimize the UAV trajectory and the scheduling of the devices by employing convex optimization techniques and graph theory. The simulations illustrate the out-performance of our solution when compared to other handpicked static and mobile UAV deployment baselines.
UAV-aided RF Mapping for Sensing and Connectivity in Wireless Networks
May 06, 2022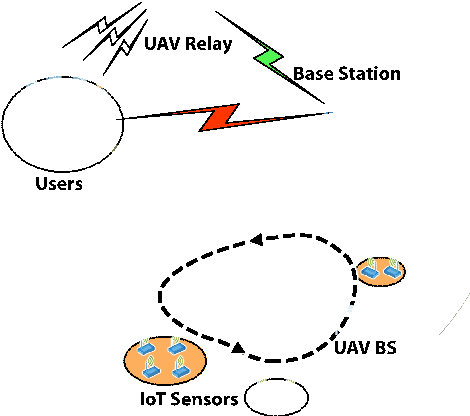
The use of unmanned aerial vehicles (UAV) as flying radio access network (RAN) nodes offers a promising complement to traditional fixed terrestrial deployments. More recently yet still in the context of wireless networks, drones have also been envisioned for use as radio frequency (RF) sensing and localization devices. In both cases, the advantage of using UAVs lies in their ability to navigate themselves freely in 3D and in a timely manner to locations of space where the obtained network throughput or sensing performance is optimal. In practice, the selection of a proper location or trajectory for the UAV very much depends on local terrain features, including the position of surrounding radio obstacles. Hence, the robot must be able to map the features of its radio environment as it performs its data communication or sensing services. The challenges related to this task, referred here as radio mapping, are discussed in this paper. Its promises related to efficient trajectory design for autonomous radio-aware UAVs are highlighted, along with algorithm solutions. The advantages induced by radio-mapping in terms of connectivity, sensing, and localization performance are illustrated.
UAV-aided Wireless Node Localization Using Hybrid Radio Channel Models
May 06, 2022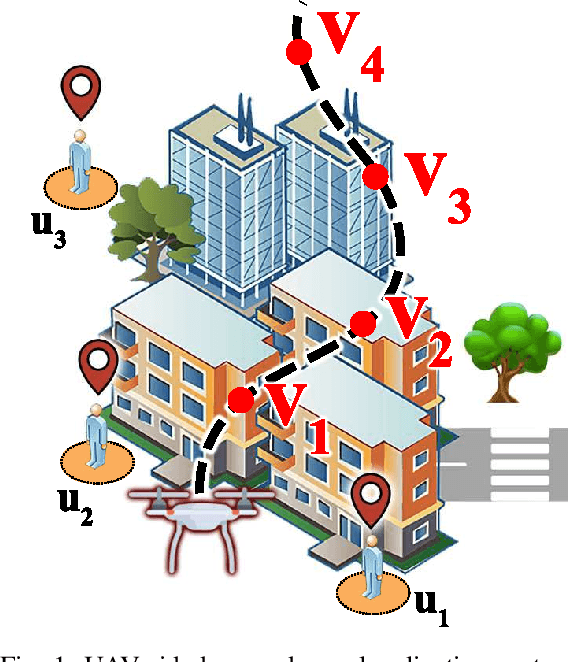
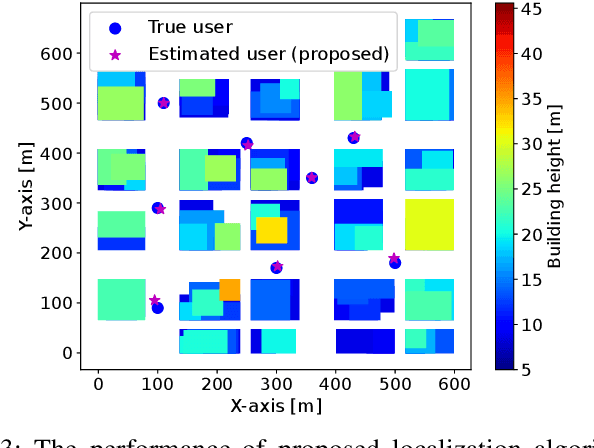
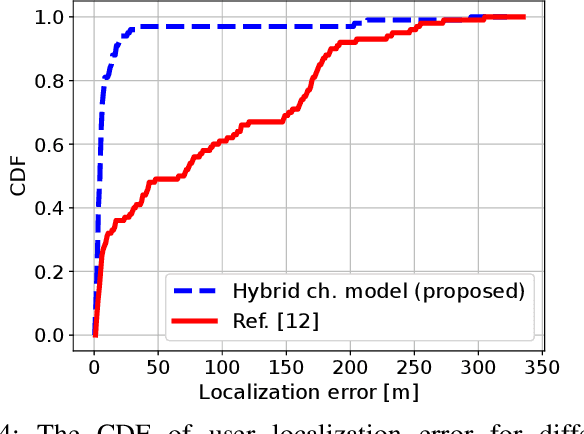
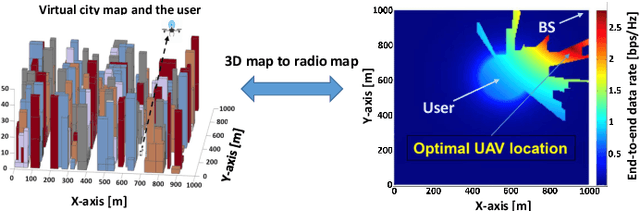
This paper considers the problem of ground user localization based on received signal strength (RSS) measurements obtained by an unmanned aerial vehicle (UAV). We treat UAV-user link channel model parameters and antenna radiation pattern of the UAV as unknowns that need to be estimated. A hybrid channel model is proposed that consists of a traditional path loss model combined with a neural network approximating the UAV antenna gain function. With this model and a set of offline RSS measurements, the unknown parameters are estimated. We then employ the particle swarm optimization (PSO) technique which utilizes the learned hybrid channel model along with a 3D map of the environment to accurately localize the ground users. The performance of the developed algorithm is evaluated through simulations and also real-world experiments.
Model-aided Deep Reinforcement Learning for Sample-efficient UAV Trajectory Design in IoT Networks
May 03, 2021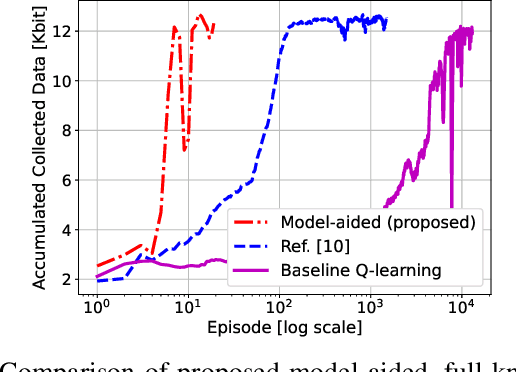
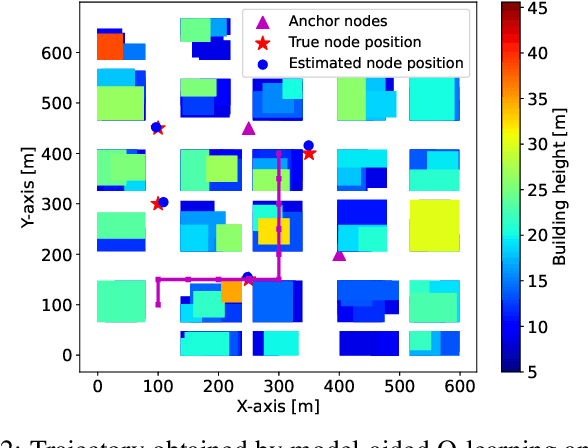
Deep Reinforcement Learning (DRL) is gaining attention as a potential approach to design trajectories for autonomous unmanned aerial vehicles (UAV) used as flying access points in the context of cellular or Internet of Things (IoT) connectivity. DRL solutions offer the advantage of on-the-go learning hence relying on very little prior contextual information. A corresponding drawback however lies in the need for many learning episodes which severely restricts the applicability of such approach in real-world time- and energy-constrained missions. Here, we propose a model-aided deep Q-learning approach that, in contrast to previous work, considerably reduces the need for extensive training data samples, while still achieving the overarching goal of DRL, i.e to guide a battery-limited UAV towards an efficient data harvesting trajectory, without prior knowledge of wireless channel characteristics and limited knowledge of wireless node locations. The key idea consists in using a small subset of nodes as anchors (i.e. with known location) and learning a model of the propagation environment while implicitly estimating the positions of regular nodes. Interaction with the model allows us to train a deep Q-network (DQN) to approximate the optimal UAV control policy. We show that in comparison with standard DRL approaches, the proposed model-aided approach requires at least one order of magnitude less training data samples to reach identical data collection performance, hence offering a first step towards making DRL a viable solution to the problem.