 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenISAC: An Open-Source Real-Time Experimentation Platform for OFDM-ISAC with Over-the-Air Synchronization
Jan 07, 2026Integrated sensing and communication (ISAC) is envisioned to be one of the key usage scenarios for the sixth generation (6G) mobile communication networks. While significant progresses have been achieved for the theoretical studies, the further advancement of ISAC is hampered by the lack of accessible, open-source, and real-time experimental platforms. To address this gap, we introduce OpenISAC, a versatile and high-performance open-source platform for real-time ISAC experimentation. OpenISAC utilizes orthogonal frequency division multiplexing (OFDM) waveform and implements crucial sensing functionalities, including both monostatic and bistatic delay-Doppler sensing. A key feature of our platform is a novel over-the-air (OTA) synchronization mechanism that enables robust bistatic operations without requiring a wired connection between nodes. The platform is built entirely on open-source software, leveraging the universal software radio peripheral (USRP) hardware driver (UHD) library, thus eliminating the need for any commercial licenses. It supports a wide range of software-defined radios, from the cost-effective USRP B200 series to the high-performance X400 series. The physical layer modulator and demodulator are implemented with C++ for high-speed processing, while the sensing data is streamed to a Python environment, providing a user-friendly interface for rapid prototyping and validation of sensing signal processing algorithms. With flexible parameter selection and real-time communication and sensing operation, OpenISAC serves as a powerful and accessible tool for the academic and research communities to explore and innovate within the field of OFDM-ISAC.
CKM-Enabled Joint Spatial-Doppler Domain Clutter Suppression for Low-Altitude UAV ISAC
Dec 10, 2025The rapid development of low-altitude economy has placed higher demands on the sensing of small-sized unmanned aerial vehicle (UAV) targets. However, the complex and dynamic low-altitude environment, like the urban and mountainous areas, makes clutter a significant factor affecting the sensing performance. Traditional clutter suppression methods based on Doppler difference or signal strength are inadequate for scenarios with dynamic clutter and slow-moving targets like low-altitude UAVs. In this paper, motivated by the concept of channel knowledge map (CKM), we propose a novel clutter suppression technique for orthogonal frequency division multiplexing (OFDM) integrated sensing and communication (ISAC) system, by leveraging a new type of CKM named clutter angle map (CLAM). CLAM is a site-specific database, containing location-specific primary clutter angles for the coverage area of the ISAC base station (BS). With CLAM, the sensing signal components corresponding to the clutter environment can be effectively removed before target detection and parameter estimation, which greatly enhances the sensing performance. Besides, to take into account the scenarios when the targets and clutters are in close directions so that pure CLAM-based spatial domain clutter suppression is no longer effective, we further propose a two-step CLAM-enabled joint spatial-Doppler domain clutter suppression algorithm. Simulation results demonstrate that the proposed technique effectively suppresses clutter and enhances target sensing performance, achieving accurate parameter estimation for sensing slow-moving low-altitude UAV targets.
Data Fusion for BS-UE Cooperative MIMO-OFDM ISAC
Sep 16, 2025Integrated sensing and communication (ISAC) is a promising technique for expanding the functionalities of wireless networks with enhanced spectral efficiency. The 3rd Generation Partnership Project (3GPP) has defined six basic sensing operation modes in wireless networks. To further enhance the sensing capability of wireless networks, this paper proposes a new sensing operation mode, i.e., the base station (BS) and user equipment (UE) cooperative sensing. Specifically, after decoding the communication data, the UE further processes the received signal to extract the target sensing information. We propose an efficient algorithm for fusing the sensing results obtained by the BS and UE, by exploiting the geometric relationship among BS, UE and targets as well as the expected sensing quality in the BS monostatic and BS-UE bistatic sensing. The results show that the proposed data fusion method for cooperative sensing can effectively improve the position and velocity estimation accuracy of multiple targets, and provide a new approach on the expansion of the sensing pattern.
A Tutorial on MIMO-OFDM ISAC: From Far-Field to Near-Field
Apr 27, 2025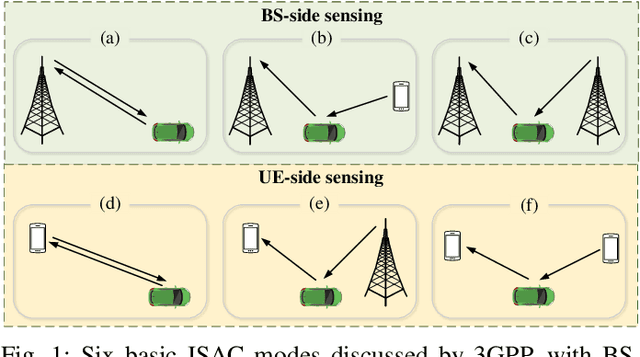
Integrated sensing and communication (ISAC) is one of the key usage scenarios for future sixth-generation (6G) mobile communication networks, where communication and sensing (C&S) services are simultaneously provided through shared wireless spectrum, signal processing modules, hardware, and network infrastructure. Such an integration is strengthened by the technology trends in 6G, such as denser network nodes, larger antenna arrays, wider bandwidths, higher frequency bands, and more efficient utilization of spectrum and hardware resources, which incentivize and empower enhanced sensing capabilities. As the dominant waveform used in contemporary communication systems, orthogonal frequency division multiplexing (OFDM) is still expected to be a very competitive technology for 6G, rendering it necessary to thoroughly investigate the potential and challenges of OFDM ISAC. Thus, this paper aims to provide a comprehensive tutorial overview of ISAC systems enabled by large-scale multi-input multi-output (MIMO) and OFDM technologies and to discuss their fundamental principles, advantages, and enabling signal processing methods. To this end, a unified MIMO-OFDM ISAC system model is first introduced, followed by four frameworks for estimating parameters across the spatial, delay, and Doppler domains, including parallel one-domain, sequential one-domain, joint two-domain, and joint three-domain parameter estimation. Next, sensing algorithms and performance analyses are presented in detail for far-field scenarios where uniform plane wave (UPW) propagation is valid, followed by their extensions to near-field scenarios where uniform spherical wave (USW) characteristics need to be considered. Finally, this paper points out open challenges and outlines promising avenues for future research on MIMO-OFDM ISAC.
How Does CP Length Affect the Sensing Range for OFDM-ISAC?
Mar 11, 2025



Orthogonal frequency division multiplexing (OFDM), which has been the dominating waveform for contemporary wireless communications, is also regarded as a competitive candidate for future integrated sensing and communication (ISAC) systems. Existing works on OFDM-ISAC usually assume that the maximum sensing range should be limited by the cyclic prefix (CP) length since inter-symbol interference (ISI) and inter-carrier interference (ICI) should be avoided. However, in this paper, we provide rigorous analysis to reveal that the random data embedded in OFDM-ISAC signal can actually act as a free ``mask" for ISI, which makes ISI/ICI random and hence greatly attenuated after radar signal processing. The derived signal-to-interference-plus-noise ratio (SINR) in the range profile demonstrates that the maximum sensing range of OFDM-ISAC can greatly exceed the ISI-free distance that is limited by the CP length, which is validated by simulation results. To further mitigate power degradation for long-range targets, a novel sliding window sensing method is proposed, which iteratively detects and cancels short-range targets before shifting the detection window. The shifted detection window can effectively compensate the power degradation due to insufficient CP length for long-range targets. Such results provide valuable guidance for the CP length design in OFDM-ISAC systems.
Generating CKM Using Others' Data: Cross-AP CKM Inference with Deep Learning
Nov 20, 2024Channel knowledge map (CKM) is a promising paradigm shift towards environment-aware communication and sensing by providing location-specific prior channel knowledge before real-time communication. Although CKM is particularly appealing for dense networks such as cell-free networks, it remains a challenge to efficiently generate CKMs in dense networks. For a dense network with CKMs of existing access points (APs), it will be useful to efficiently generate CKMs of potentially new APs with only AP location information. The generation of inferred CKMs across APs can help dense networks achieve convenient initial CKM generation, environment-aware AP deployment, and cost-effective CKM updates. Considering that different APs in the same region share the same physical environment, there exists a natural correlation between the channel knowledge of different APs. Therefore, by mining the implicit correlation between location-specific channel knowledge, cross-AP CKM inference can be realized using data from other APs. This paper proposes a cross-AP inference method to generate CKMs of potentially new APs with deep learning. The location of the target AP is fed into the UNet model in combination with the channel knowledge of other existing APs, and supervised learning is performed based on the channel knowledge of the target AP. Based on the trained UNet and the channel knowledge of the existing APs, the CKM inference of the potentially new AP can be generated across APs. The generation results of the inferred CKM validate the feasibility and effectiveness of cross-AP CKM inference with other APs' channel knowledge.
Prototyping and Experimental Results for ISAC-based Channel Knowledge Map
Aug 12, 2024



Channel knowledge map (CKM) is a novel approach for achieving environment-aware communication and sensing. This paper presents an integrated sensing and communication (ISAC)-based CKM prototype system, demonstrating the mutualistic relationship between ISAC and CKM. The system consists of an ISAC base station (BS), a user equipment (UE), and a server. By using a shared orthogonal frequency division multiplexing (OFDM) waveform over the millimeter wave (mmWave) band, the ISAC BS is able to communicate with the UE while simultaneously sensing the environment and acquiring the UE's location. The prototype showcases the complete process of the construction and application of the ISAC-based CKM. For CKM construction phase, the BS stores the UE's channel feedback information in a database indexed by the UE's location, including beam indices and channel gain. For CKM application phase, the BS looks up the best beam index from the CKM based on the UE's location to achieve training-free mmWave beam alignment. The experimental results show that ISAC can be used to construct or update CKM while communicating with UEs, and the pre-learned CKM can assist ISAC for training-free beam alignment.
Efficient Channel Estimation for Millimeter Wave and Terahertz Systems Enabled by Integrated Super-resolution Sensing and Communication
Jul 30, 2024


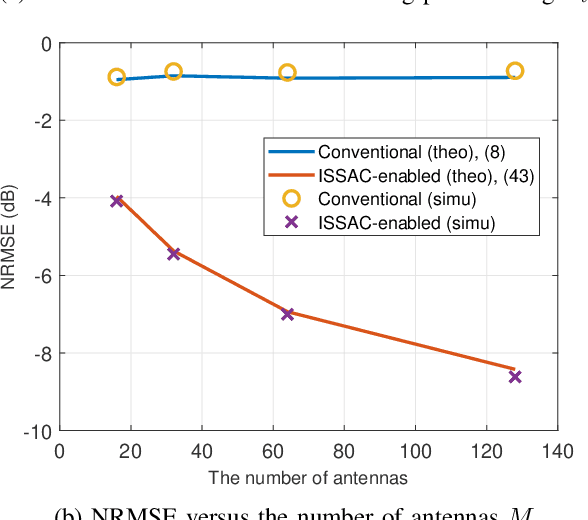
Integrated super-resolution sensing and communication (ISSAC) has emerged as a promising technology to achieve extremely high precision sensing for those key parameters, such as the angles of the sensing targets. In this paper, we propose an efficient channel estimation scheme enabled by ISSAC for millimeter wave (mmWave) and TeraHertz (THz) systems with a hybrid analog/digital beamforming architecture, where both the pilot overhead and the cost of radio frequency (RF) chains are significantly reduced. The key idea is to exploit the fact that subspace-based super-resolution algorithms such as multiple signal classification (MUSIC) can estimate channel parameters accurately without requiring dedicate a priori known pilots. In particular, the proposed method consists of two stages. First, the angles of the multi-path channel components are estimated in a pilot-free manner during the transmission of data symbols. Second, the multi-path channel coefficients are estimated with very few pilots. Compared to conventional channel estimation schemes that rely solely on channel training, our approach requires the estimation of much fewer parameters in the second stage. Furthermore, with channel multi-path angles obtained, the beamforming gain can be achieved when pilots are sent to estimate the channel path gains. To comprehensively investigate the performance of the proposed scheme, we consider both the basic line-of-sight (LoS) channels and more general multi-path channels. We compare the performance of the minimum mean square error (MMSE) of channel estimation and the resulting beamforming gains of our proposed scheme with the traditional scheme that rely exclusively on channel training. It is demonstrated that our proposed method significantly outperforms the benchmarking scheme. Simulation results are presented to validate our theoretical findings.
Performance Analysis of Hybrid Cellular and Cell-free MIMO Network
Jun 04, 2024Cell-free wireless communication is envisioned as one of the most promising network architectures, which can achieve stable and uniform communication performance while improving the system energy and spectrum efficiency. The deployment of cell-free networks is envisioned to be a longterm evolutionary process, in which cell-free access points (APs) will be gradually introduced into the communication network and collaborate with the existing cellular base stations (BSs). To further explore the performance limits of hybrid cellular and cell-free networks, this paper develops a hybrid network model based on stochastic geometric toolkits, which reveals the coupling of the signal and interference from both the cellular and cell-free networks. Specifically, the conjugate beamforming is applied in hybrid cellular and cell-free networks, which enables user equipment (UE) to benefit from both cellular BSs and cell-free APs. The aggregate signal received from the hybrid network is approximated via moment matching, and coverage probability is characterized by deriving the Laplace transform of the interference. The analysis of signal strength and coverage probability is verified by extensive simulations.
Environment-aware UAV Communications: CKM Construction and Predictive Beamforming
Apr 18, 2024Predictive millimeter-wave (mmWave) beamforming is a promising technique to enable low-latency and high-rate ground-air communications for cellular-connected unmanned aerial vehicles (UAVs). However, the high vulnerability of mmWave to blockages poses practical challenges to the implementation of such a technology. In this paper, we tackle the challenges by proposing a channel knowledge map (CKM)-assisted predictive beamforming approach based on the echoed joint communication and sensing signal, whereby the line-of-sight (LoS) link identification is performed via hypothesis testing using prior information provided by CKM. Depending on the identification result, extended Kalman filtering (EKF) is adopted to reliably track the target UAV. Furthermore, if the non-line-of-sight (NLoS) state is identified, the target UAV will be immediately connected to a candidate base station (BS), namely a handover will be triggered to alleviate the communication outage. The simulation results show that the proposed method can significantly enhance the UAV tracking and mmWave communication performance compared to the benchmarking schemes without using CKM or LoS identification.