 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFIVA: Facial Image and Video Anonymization and Anonymization Defense
Sep 08, 2023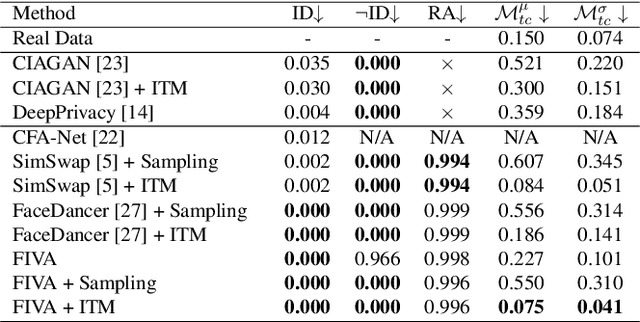
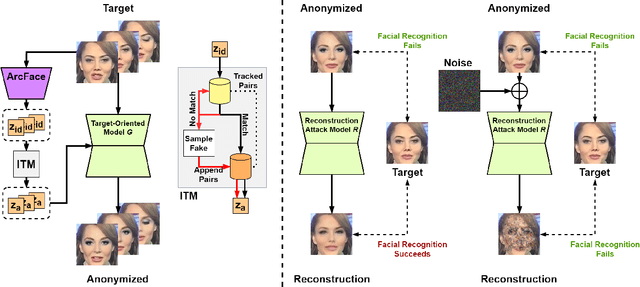
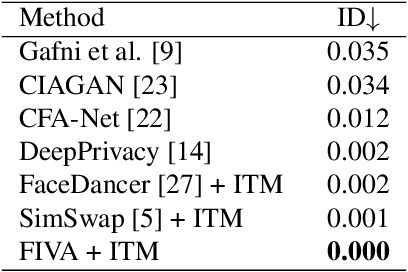
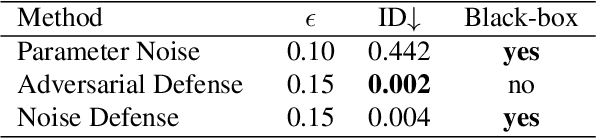
In this paper, we present a new approach for facial anonymization in images and videos, abbreviated as FIVA. Our proposed method is able to maintain the same face anonymization consistently over frames with our suggested identity-tracking and guarantees a strong difference from the original face. FIVA allows for 0 true positives for a false acceptance rate of 0.001. Our work considers the important security issue of reconstruction attacks and investigates adversarial noise, uniform noise, and parameter noise to disrupt reconstruction attacks. In this regard, we apply different defense and protection methods against these privacy threats to demonstrate the scalability of FIVA. On top of this, we also show that reconstruction attack models can be used for detection of deep fakes. Last but not least, we provide experimental results showing how FIVA can even enable face swapping, which is purely trained on a single target image.
Drone navigation and license place detection for vehicle location in indoor spaces
Jul 20, 2023Millions of vehicles are transported every year, tightly parked in vessels or boats. To reduce the risks of associated safety issues like fires, knowing the location of vehicles is essential, since different vehicles may need different mitigation measures, e.g. electric cars. This work is aimed at creating a solution based on a nano-drone that navigates across rows of parked vehicles and detects their license plates. We do so via a wall-following algorithm, and a CNN trained to detect license plates. All computations are done in real-time on the drone, which just sends position and detected images that allow the creation of a 2D map with the position of the plates. Our solution is capable of reading all plates across eight test cases (with several rows of plates, different drone speeds, or low light) by aggregation of measurements across several drone journeys.
FaceDancer: Pose- and Occlusion-Aware High Fidelity Face Swapping
Oct 19, 2022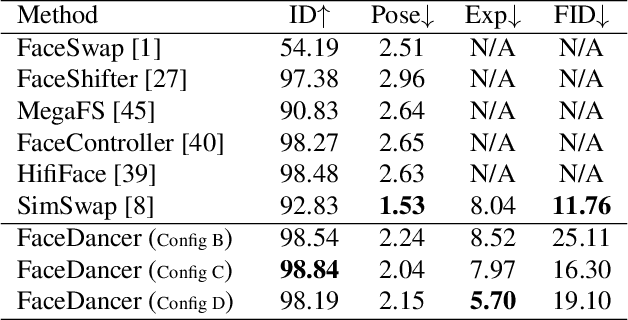
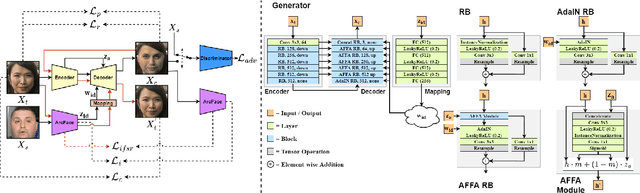
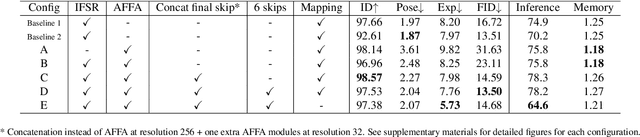
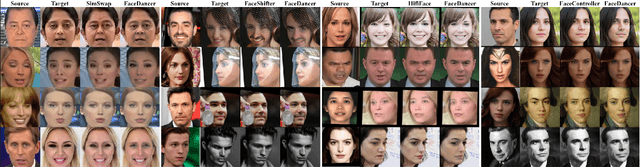
In this work, we present a new single-stage method for subject agnostic face swapping and identity transfer, named FaceDancer. We have two major contributions: Adaptive Feature Fusion Attention (AFFA) and Interpreted Feature Similarity Regularization (IFSR). The AFFA module is embedded in the decoder and adaptively learns to fuse attribute features and features conditioned on identity information without requiring any additional facial segmentation process. In IFSR, we leverage the intermediate features in an identity encoder to preserve important attributes such as head pose, facial expression, lighting, and occlusion in the target face, while still transferring the identity of the source face with high fidelity. We conduct extensive quantitative and qualitative experiments on various datasets and show that the proposed FaceDancer outperforms other state-of-the-art networks in terms of identityn transfer, while having significantly better pose preservation than most of the previous methods.
Drone Detection and Tracking in Real-Time by Fusion of Different Sensing Modalities
Jul 05, 2022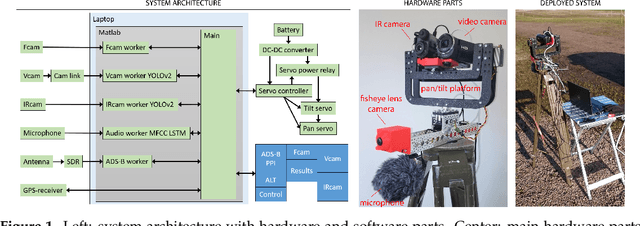



Automatic detection of flying drones is a key issue where its presence, specially if unauthorized, can create risky situations or compromise security. Here, we design and evaluate a multi-sensor drone detection system. In conjunction with common video cameras and microphone sensors, we explore the use of thermal infrared cameras, pointed out as a feasible and promising solution that is scarcely addressed in the related literature. Our solution integrates a fish-eye camera as well to monitor a wider part of the sky and steer the other cameras towards objects of interest. The sensing solutions are complemented with an ADS-B receiver, a GPS receiver, and a radar module, although the latter has been not included in our final deployment due to its limited detection range. The thermal camera is shown to be a feasible solution as good as the video camera, even if the camera employed here has a lower resolution. Two other novelties of our work are the creation of a new public dataset of multi-sensor annotated data that expand the number of classes in comparison to existing ones, as well as the study of the detector performance as a function of the sensor-to-target distance. Sensor fusion is also explored, showing that the system can be made more robust in this way, mitigating false detections of the individual sensors
Performance Analysis of Out-of-Distribution Detection on Trained Neural Networks
Apr 26, 2022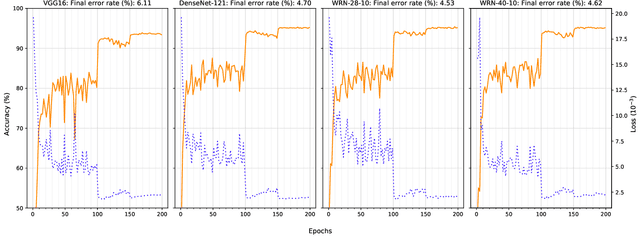
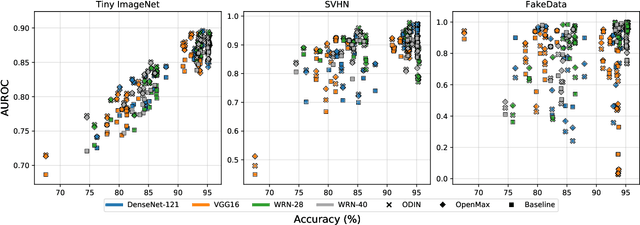
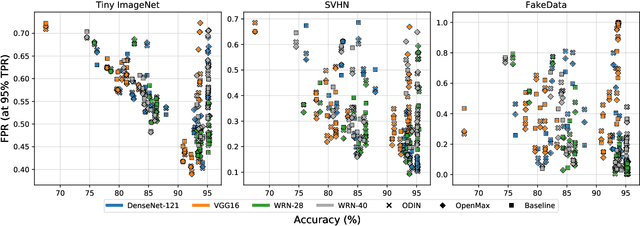
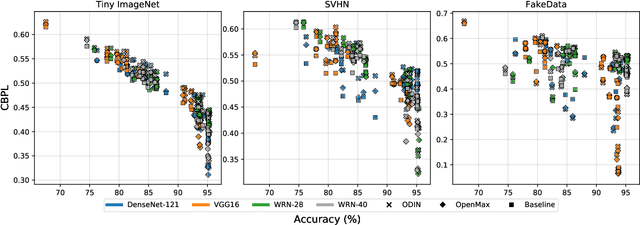
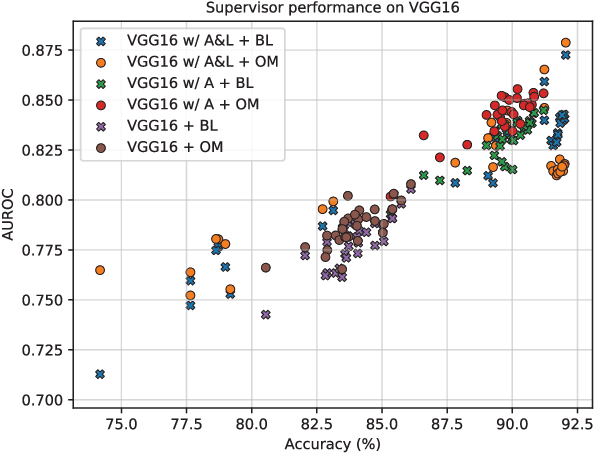
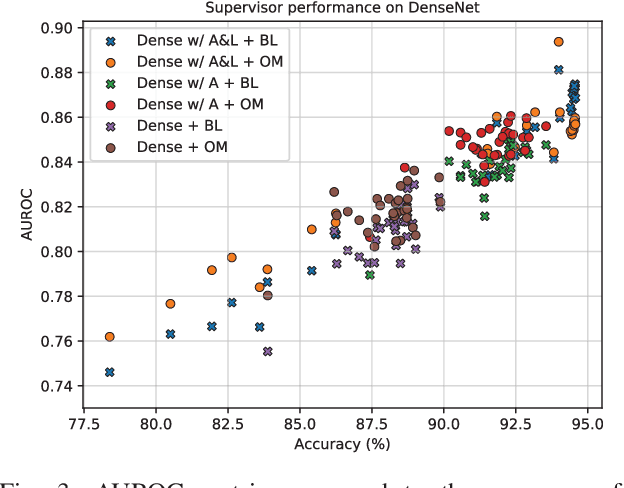
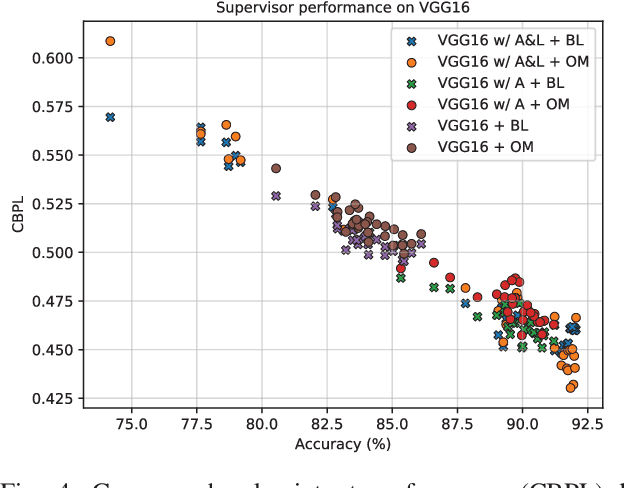
Several areas have been improved with Deep Learning during the past years. Implementing Deep Neural Networks (DNN) for non-safety related applications have shown remarkable achievements over the past years; however, for using DNNs in safety critical applications, we are missing approaches for verifying the robustness of such models. A common challenge for DNNs occurs when exposed to out-of-distribution samples that are outside of the scope of a DNN, but which result in high confidence outputs despite no prior knowledge of such input. In this paper, we analyze three methods that separate between in- and out-of-distribution data, called supervisors, on four well-known DNN architectures. We find that the outlier detection performance improves with the quality of the model. We also analyse the performance of the particular supervisors during the training procedure by applying the supervisor at a predefined interval to investigate its performance as the training proceeds. We observe that understanding the relationship between training results and supervisor performance is crucial to improve the model's robustness and to indicate, what input samples require further measures to improve the robustness of a DNN. In addition, our work paves the road towards an instrument for safety argumentation for safety critical applications. This paper is an extended version of our previous work presented at 2019 SEAA (cf. [1]); here, we elaborate on the used metrics, add an additional supervisor and test them on two additional datasets.
A dataset for multi-sensor drone detection
Nov 02, 2021


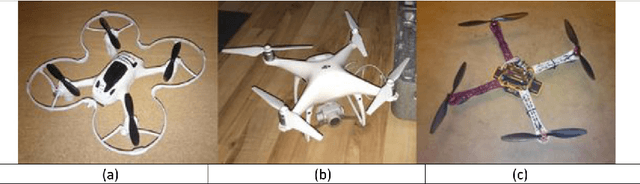
The use of small and remotely controlled unmanned aerial vehicles (UAVs), or drones, has increased in recent years. This goes in parallel with misuse episodes, with an evident threat to the safety of people or facilities. As a result, the detection of UAV has also emerged as a research topic. Most studies on drone detection fail to specify the type of acquisition device, the drone type, the detection range, or the dataset. The lack of proper UAV detection studies employing thermal infrared cameras is also an issue, despite its success with other targets. Besides, we have not found any previous study that addresses the detection task as a function of distance to the target. Sensor fusion is indicated as an open research issue as well, although research in this direction is scarce too. To counteract the mentioned issues and allow fundamental studies with a common public benchmark, we contribute with an annotated multi-sensor database for drone detection that includes infrared and visible videos and audio files. The database includes three different drones, of different sizes and other flying objects that can be mistakenly detected as drones, such as birds, airplanes or helicopters. In addition to using several different sensors, the number of classes is higher than in previous studies. To allow studies as a function of the sensor-to-target distance, the dataset is divided into three categories (Close, Medium, Distant) according to the industry-standard Detect, Recognize and Identify (DRI) requirements, built on the Johnson criteria. Given that the drones must be flown within visual range due to regulations, the largest sensor-to-target distance for a drone is 200 m, and acquisitions are made in daylight. The data has been obtained at three airports in Sweden: Halmstad Airport (IATA code: HAD/ICAO code: ESMT), Gothenburg City Airport (GSE/ESGP) and Malm\"o Airport (MMX/ESMS).
AI in Smart Cities: Challenges and approaches to enable road vehicle automation and smart traffic control
Apr 07, 2021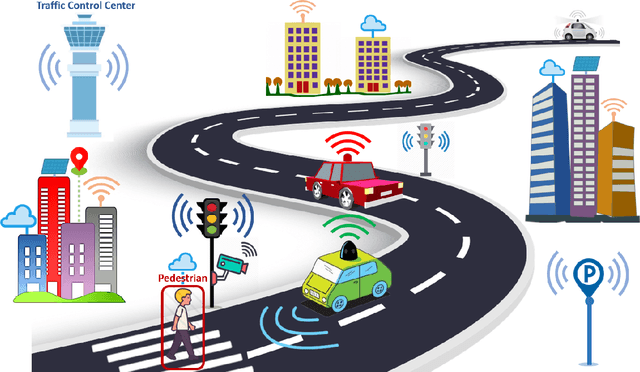

Smart Cities and Communities (SCC) constitute a new paradigm in urban development. SCC ideates on a data-centered society aiming at improving efficiency by automating and optimizing activities and utilities. Information and communication technology along with the internet of things enables data collection and with the help of artificial intelligence (AI) situation awareness can be obtained to feed the SCC actors with enriched knowledge. This paper describes AI perspectives in SCC and gives an overview of AI-based technologies used in traffic to enable road vehicle automation and smart traffic control. Perception, Smart Traffic Control and Driver Modelling are described along with open research challenges and standardization to help introduce advanced driver assistance systems in traffic. AI technologies provide accurate prediction and classifcation; however, the models do not provide any evidence on their output making them hard to trust for a human operator. In addition, there are currently no methods that can be used to describe requirements of how the data should be annotated in order to train an accurate model.
Performance Analysis of Out-of-Distribution Detection on Various Trained Neural Networks
Mar 29, 2021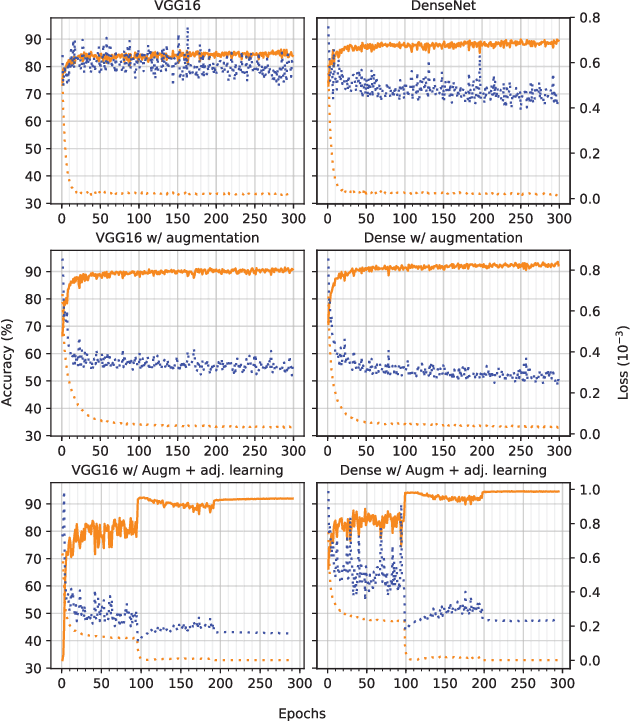
Several areas have been improved with Deep Learning during the past years. For non-safety related products adoption of AI and ML is not an issue, whereas in safety critical applications, robustness of such approaches is still an issue. A common challenge for Deep Neural Networks (DNN) occur when exposed to out-of-distribution samples that are previously unseen, where DNNs can yield high confidence predictions despite no prior knowledge of the input. In this paper we analyse two supervisors on two well-known DNNs with varied setups of training and find that the outlier detection performance improves with the quality of the training procedure. We analyse the performance of the supervisor after each epoch during the training cycle, to investigate supervisor performance as the accuracy converges. Understanding the relationship between training results and supervisor performance is valuable to improve robustness of the model and indicates where more work has to be done to create generalized models for safety critical applications.
Real-Time Drone Detection and Tracking With Visible, Thermal and Acoustic Sensors
Jul 14, 2020



This paper explores the process of designing an automatic multi-sensor drone detection system. Besides the common video and audio sensors, the system also includes a thermal infrared camera, which is shown to be a feasible solution to the drone detection task. Even with slightly lower resolution, the performance is just as good as a camera in visible range. The detector performance as a function of the sensor-to-target distance is also investigated. In addition, using sensor fusion, the system is made more robust than the individual sensors, helping to reduce false detections. To counteract the lack of public datasets, a novel video dataset containing 650 annotated infrared and visible videos of drones, birds, airplanes and helicopters is also presented. The database is complemented with an audio dataset of the classes drones, helicopters and background noise.
Towards Structured Evaluation of Deep Neural Network Supervisors
Mar 07, 2019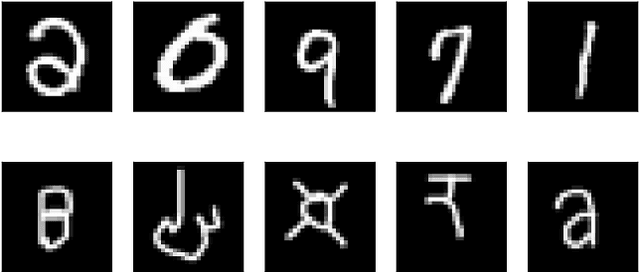
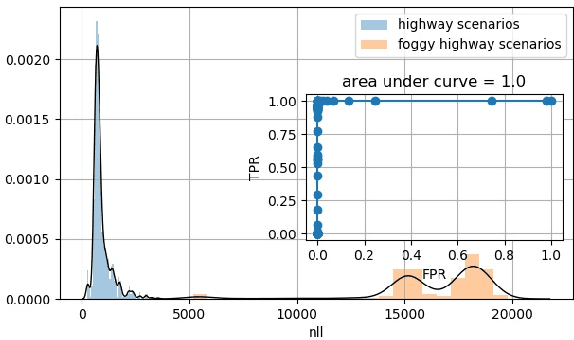
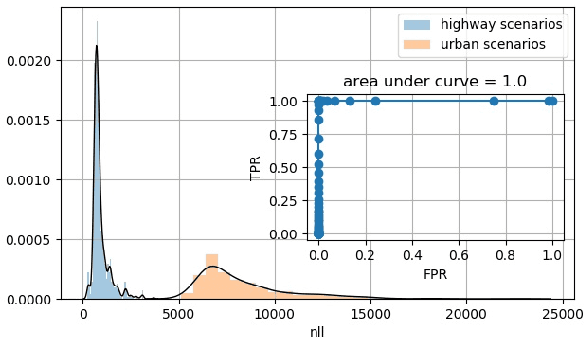
Deep Neural Networks (DNN) have improved the quality of several non-safety related products in the past years. However, before DNNs should be deployed to safety-critical applications, their robustness needs to be systematically analyzed. A common challenge for DNNs occurs when input is dissimilar to the training set, which might lead to high confidence predictions despite proper knowledge of the input. Several previous studies have proposed to complement DNNs with a supervisor that detects when inputs are outside the scope of the network. Most of these supervisors, however, are developed and tested for a selected scenario using a specific performance metric. In this work, we emphasize the need to assess and compare the performance of supervisors in a structured way. We present a framework constituted by four datasets organized in six test cases combined with seven evaluation metrics. The test cases provide varying complexity and include data from publicly available sources as well as a novel dataset consisting of images from simulated driving scenarios. The latter we plan to make publicly available. Our framework can be used to support DNN supervisor evaluation, which in turn could be used to motive development, validation, and deployment of DNNs in safety-critical applications.