 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrone Detection and Tracking in Real-Time by Fusion of Different Sensing Modalities
Paper and Code
Jul 05, 2022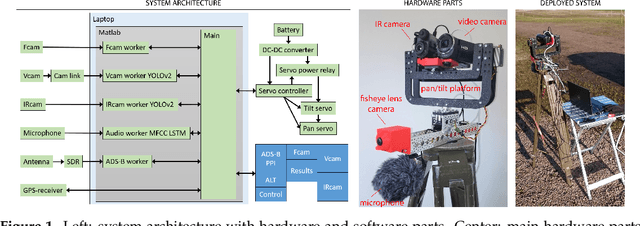



Automatic detection of flying drones is a key issue where its presence, specially if unauthorized, can create risky situations or compromise security. Here, we design and evaluate a multi-sensor drone detection system. In conjunction with common video cameras and microphone sensors, we explore the use of thermal infrared cameras, pointed out as a feasible and promising solution that is scarcely addressed in the related literature. Our solution integrates a fish-eye camera as well to monitor a wider part of the sky and steer the other cameras towards objects of interest. The sensing solutions are complemented with an ADS-B receiver, a GPS receiver, and a radar module, although the latter has been not included in our final deployment due to its limited detection range. The thermal camera is shown to be a feasible solution as good as the video camera, even if the camera employed here has a lower resolution. Two other novelties of our work are the creation of a new public dataset of multi-sensor annotated data that expand the number of classes in comparison to existing ones, as well as the study of the detector performance as a function of the sensor-to-target distance. Sensor fusion is also explored, showing that the system can be made more robust in this way, mitigating false detections of the individual sensors