 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrone navigation and license place detection for vehicle location in indoor spaces
Jul 20, 2023Millions of vehicles are transported every year, tightly parked in vessels or boats. To reduce the risks of associated safety issues like fires, knowing the location of vehicles is essential, since different vehicles may need different mitigation measures, e.g. electric cars. This work is aimed at creating a solution based on a nano-drone that navigates across rows of parked vehicles and detects their license plates. We do so via a wall-following algorithm, and a CNN trained to detect license plates. All computations are done in real-time on the drone, which just sends position and detected images that allow the creation of a 2D map with the position of the plates. Our solution is capable of reading all plates across eight test cases (with several rows of plates, different drone speeds, or low light) by aggregation of measurements across several drone journeys.
Action and intention recognition of pedestrians in urban traffic
Oct 23, 2018

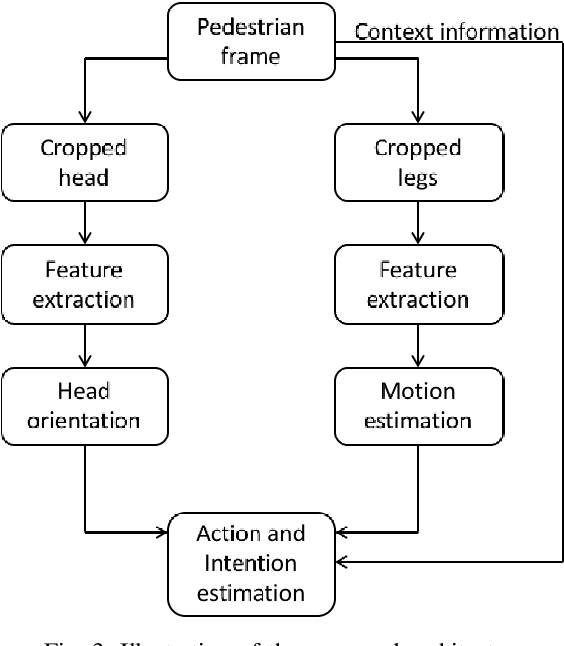
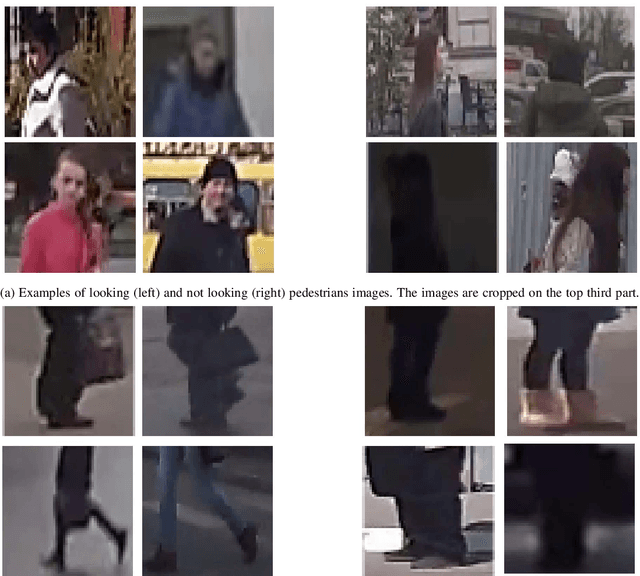
Action and intention recognition of pedestrians in urban settings are challenging problems for Advanced Driver Assistance Systems as well as future autonomous vehicles to maintain smooth and safe traffic. This work investigates a number of feature extraction methods in combination with several machine learning algorithms to build knowledge on how to automatically detect the action and intention of pedestrians in urban traffic. We focus on the motion and head orientation to predict whether the pedestrian is about to cross the street or not. The work is based on the Joint Attention for Autonomous Driving (JAAD) dataset, which contains 346 videoclips of various traffic scenarios captured with cameras mounted in the windshield of a car. An accuracy of 72% for head orientation estimation and 85% for motion detection is obtained in our experiments.