 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Analysis of Out-of-Distribution Detection on Trained Neural Networks
Apr 26, 2022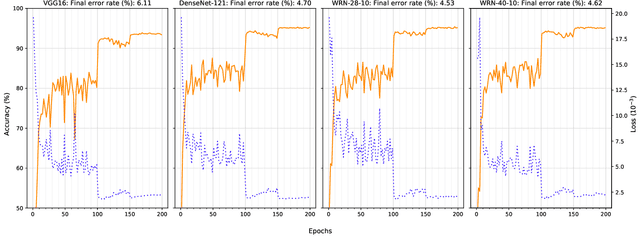
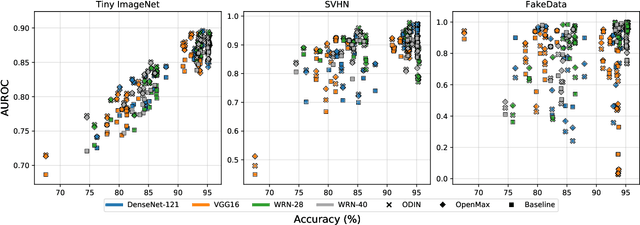
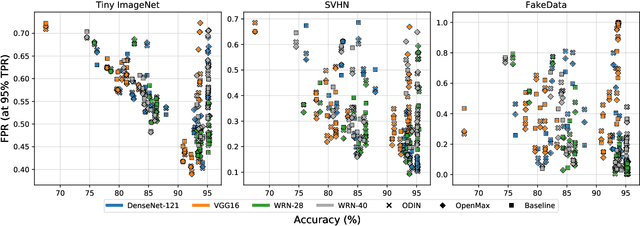
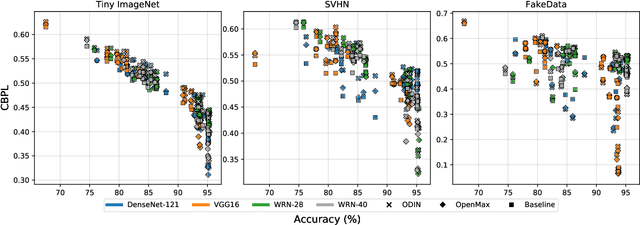
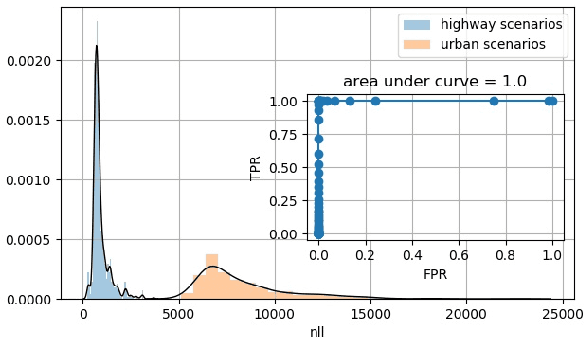
Several areas have been improved with Deep Learning during the past years. Implementing Deep Neural Networks (DNN) for non-safety related applications have shown remarkable achievements over the past years; however, for using DNNs in safety critical applications, we are missing approaches for verifying the robustness of such models. A common challenge for DNNs occurs when exposed to out-of-distribution samples that are outside of the scope of a DNN, but which result in high confidence outputs despite no prior knowledge of such input. In this paper, we analyze three methods that separate between in- and out-of-distribution data, called supervisors, on four well-known DNN architectures. We find that the outlier detection performance improves with the quality of the model. We also analyse the performance of the particular supervisors during the training procedure by applying the supervisor at a predefined interval to investigate its performance as the training proceeds. We observe that understanding the relationship between training results and supervisor performance is crucial to improve the model's robustness and to indicate, what input samples require further measures to improve the robustness of a DNN. In addition, our work paves the road towards an instrument for safety argumentation for safety critical applications. This paper is an extended version of our previous work presented at 2019 SEAA (cf. [1]); here, we elaborate on the used metrics, add an additional supervisor and test them on two additional datasets.
Performance Analysis of Out-of-Distribution Detection on Various Trained Neural Networks
Mar 29, 2021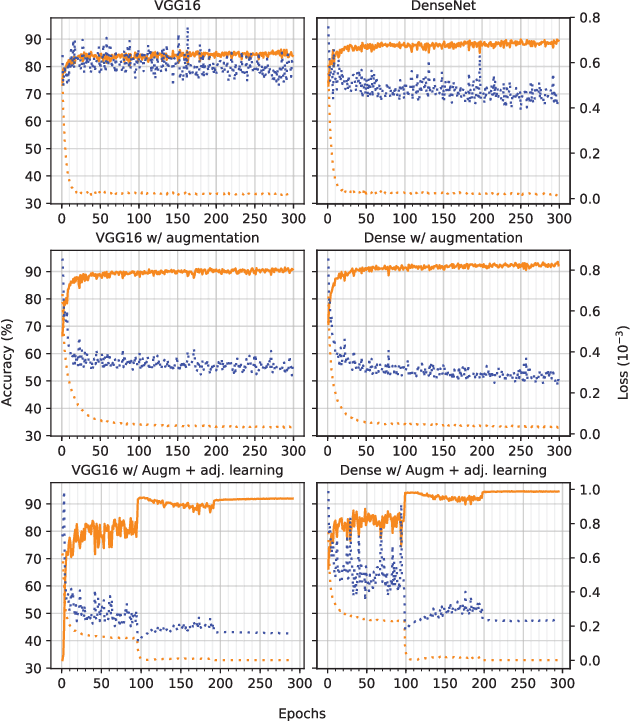
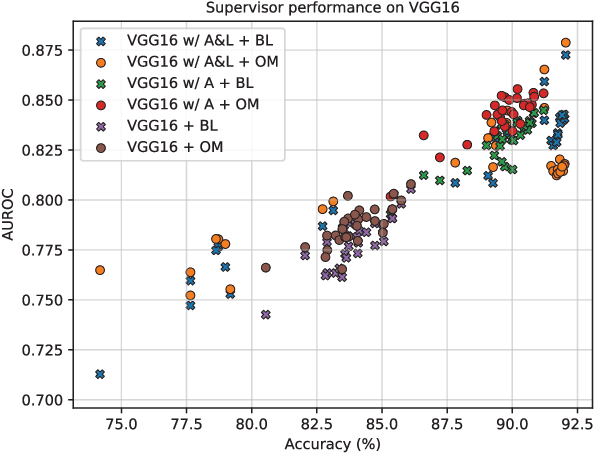
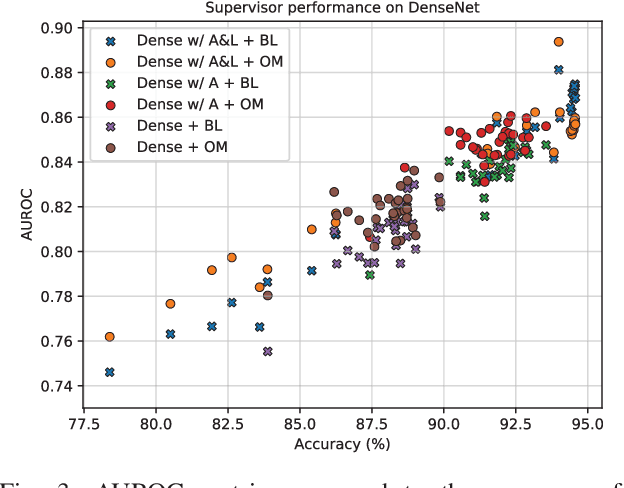
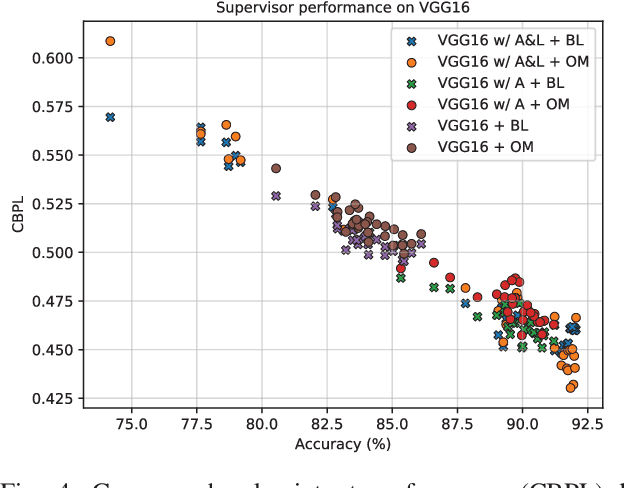
Several areas have been improved with Deep Learning during the past years. For non-safety related products adoption of AI and ML is not an issue, whereas in safety critical applications, robustness of such approaches is still an issue. A common challenge for Deep Neural Networks (DNN) occur when exposed to out-of-distribution samples that are previously unseen, where DNNs can yield high confidence predictions despite no prior knowledge of the input. In this paper we analyse two supervisors on two well-known DNNs with varied setups of training and find that the outlier detection performance improves with the quality of the training procedure. We analyse the performance of the supervisor after each epoch during the training cycle, to investigate supervisor performance as the accuracy converges. Understanding the relationship between training results and supervisor performance is valuable to improve robustness of the model and indicates where more work has to be done to create generalized models for safety critical applications.
Automated Augmentation with Reinforcement Learning and GANs for Robust Identification of Traffic Signs using Front Camera Images
Nov 15, 2019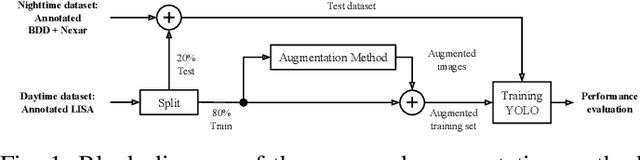

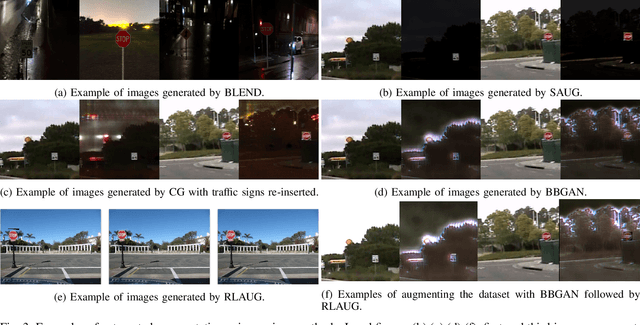

Traffic sign identification using camera images from vehicles plays a critical role in autonomous driving and path planning. However, the front camera images can be distorted due to blurriness, lighting variations and vandalism which can lead to degradation of detection performances. As a solution, machine learning models must be trained with data from multiple domains, and collecting and labeling more data in each new domain is time consuming and expensive. In this work, we present an end-to-end framework to augment traffic sign training data using optimal reinforcement learning policies and a variety of Generative Adversarial Network (GAN) models, that can then be used to train traffic sign detector modules. Our automated augmenter enables learning from transformed nightime, poor lighting, and varying degrees of occlusions using the LISA Traffic Sign and BDD-Nexar dataset. The proposed method enables mapping training data from one domain to another, thereby improving traffic sign detection precision/recall from 0.70/0.66 to 0.83/0.71 for nighttime images.
Towards Structured Evaluation of Deep Neural Network Supervisors
Mar 07, 2019
Deep Neural Networks (DNN) have improved the quality of several non-safety related products in the past years. However, before DNNs should be deployed to safety-critical applications, their robustness needs to be systematically analyzed. A common challenge for DNNs occurs when input is dissimilar to the training set, which might lead to high confidence predictions despite proper knowledge of the input. Several previous studies have proposed to complement DNNs with a supervisor that detects when inputs are outside the scope of the network. Most of these supervisors, however, are developed and tested for a selected scenario using a specific performance metric. In this work, we emphasize the need to assess and compare the performance of supervisors in a structured way. We present a framework constituted by four datasets organized in six test cases combined with seven evaluation metrics. The test cases provide varying complexity and include data from publicly available sources as well as a novel dataset consisting of images from simulated driving scenarios. The latter we plan to make publicly available. Our framework can be used to support DNN supervisor evaluation, which in turn could be used to motive development, validation, and deployment of DNNs in safety-critical applications.