 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoEngine: From Egocentric Human Videos to High-Fidelity Dexterous Robot Demonstrations
Jun 10, 2026Dexterous manipulation is limited by the cost of collecting large-scale robot demonstrations. Egocentric human videos offer a scalable source of diverse manipulation behaviors, but directly using them for robot learning requires bridging two gaps: the visual gap between human and robot observations, and the action gap between human motion and robot-executable action. We propose EgoEngine, a scalable framework for transforming egocentric human manipulation videos into high-fidelity robot data. Given an egocentric RGB video, EgoEngine produces: (i) a high-fidelity robot observation video replacing human with robot while preserving scene context and temporal alignment, and (ii) a task-aligned, executable robot action trajectory under feasibility constraints. Experiments in simulation and on real robots show that EgoEngine enables scalable conversion of human videos into robot data and, to our knowledge, demonstrates the first zero-shot visuomotor dexterous policy learning from egocentric human videos without real-robot demonstrations. Project website: https://egoengine.github.io.
Don't Yell at Your Robot: Physical Correction as the Collaborative Interface for Language Model Powered Robots
Dec 17, 2024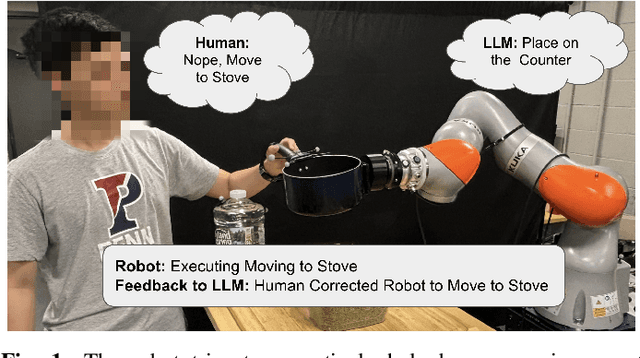



We present a novel approach for enhancing human-robot collaboration using physical interactions for real-time error correction of large language model (LLM) powered robots. Unlike other methods that rely on verbal or text commands, the robot leverages an LLM to proactively executes 6 DoF linear Dynamical System (DS) commands using a description of the scene in natural language. During motion, a human can provide physical corrections, used to re-estimate the desired intention, also parameterized by linear DS. This corrected DS can be converted to natural language and used as part of the prompt to improve future LLM interactions. We provide proof-of-concept result in a hybrid real+sim experiment, showcasing physical interaction as a new possibility for LLM powered human-robot interface.
Evolutionary Morphology Towards Overconstrained Locomotion via Large-Scale, Multi-Terrain Deep Reinforcement Learning
Jul 01, 2024



While the animals' Fin-to-Limb evolution has been well-researched in biology, such morphological transformation remains under-adopted in the modern design of advanced robotic limbs. This paper investigates a novel class of overconstrained locomotion from a design and learning perspective inspired by evolutionary morphology, aiming to integrate the concept of `intelligent design under constraints' - hereafter referred to as constraint-driven design intelligence - in developing modern robotic limbs with superior energy efficiency. We propose a 3D-printable design of robotic limbs parametrically reconfigurable as a classical planar 4-bar linkage, an overconstrained Bennett linkage, and a spherical 4-bar linkage. These limbs adopt a co-axial actuation, identical to the modern legged robot platforms, with the added capability of upgrading into a wheel-legged system. Then, we implemented a large-scale, multi-terrain deep reinforcement learning framework to train these reconfigurable limbs for a comparative analysis of overconstrained locomotion in energy efficiency. Results show that the overconstrained limbs exhibit more efficient locomotion than planar limbs during forward and sideways walking over different terrains, including floors, slopes, and stairs, with or without random noises, by saving at least 22% mechanical energy in completing the traverse task, with the spherical limbs being the least efficient. It also achieves the highest average speed of 0.85 meters per second on flat terrain, which is 20% faster than the planar limbs. This study paves the path for an exciting direction for future research in overconstrained robotics leveraging evolutionary morphology and reconfigurable mechanism intelligence when combined with state-of-the-art methods in deep reinforcement learning.
SMAT: A Self-Reinforcing Framework for Simultaneous Mapping and Tracking in Unbounded Urban Environments
Apr 27, 2023With the increasing prevalence of robots in daily life, it is crucial to enable robots to construct a reliable map online to navigate in unbounded and changing environments. Although existing methods can individually achieve the goals of spatial mapping and dynamic object detection and tracking, limited research has been conducted on an effective combination of these two important abilities. The proposed framework, SMAT (Simultaneous Mapping and Tracking), integrates the front-end dynamic object detection and tracking module with the back-end static mapping module using a self-reinforcing mechanism, which promotes mutual improvement of mapping and tracking performance. The conducted experiments demonstrate the framework's effectiveness in real-world applications, achieving successful long-range navigation and mapping in multiple urban environments using only one LiDAR, a CPU-only onboard computer, and a consumer-level GPS receiver.