 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolutionary Morphology Towards Overconstrained Locomotion via Large-Scale, Multi-Terrain Deep Reinforcement Learning
Jul 01, 2024



While the animals' Fin-to-Limb evolution has been well-researched in biology, such morphological transformation remains under-adopted in the modern design of advanced robotic limbs. This paper investigates a novel class of overconstrained locomotion from a design and learning perspective inspired by evolutionary morphology, aiming to integrate the concept of `intelligent design under constraints' - hereafter referred to as constraint-driven design intelligence - in developing modern robotic limbs with superior energy efficiency. We propose a 3D-printable design of robotic limbs parametrically reconfigurable as a classical planar 4-bar linkage, an overconstrained Bennett linkage, and a spherical 4-bar linkage. These limbs adopt a co-axial actuation, identical to the modern legged robot platforms, with the added capability of upgrading into a wheel-legged system. Then, we implemented a large-scale, multi-terrain deep reinforcement learning framework to train these reconfigurable limbs for a comparative analysis of overconstrained locomotion in energy efficiency. Results show that the overconstrained limbs exhibit more efficient locomotion than planar limbs during forward and sideways walking over different terrains, including floors, slopes, and stairs, with or without random noises, by saving at least 22% mechanical energy in completing the traverse task, with the spherical limbs being the least efficient. It also achieves the highest average speed of 0.85 meters per second on flat terrain, which is 20% faster than the planar limbs. This study paves the path for an exciting direction for future research in overconstrained robotics leveraging evolutionary morphology and reconfigurable mechanism intelligence when combined with state-of-the-art methods in deep reinforcement learning.
Describing Robots from Design to Learning: Towards an Interactive Lifecycle Representation of Robots
Dec 19, 2023


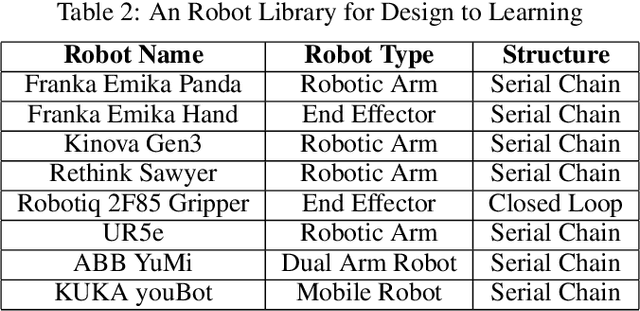
The robot development process is divided into several stages, which create barriers to the exchange of information between these different stages. We advocate for an interactive lifecycle representation, extending from robot morphology design to learning, and introduce the role of robot description formats in facilitating information transfer throughout this pipeline. We analyzed the relationship between design and simulation, enabling us to employ robot process automation methods for transferring information from the design phase to the learning phase in simulation. As part of this effort, we have developed an open-source plugin called ACDC4Robot for Fusion 360, which automates this process and transforms Fusion 360 into a user-friendly graphical interface for creating and editing robot description formats. Additionally, we offer an out-of-the-box robot model library to streamline and reduce repetitive tasks. All codes are hosted open-source. (\url{https://github.com/bionicdl-sustech/ACDC4Robot})