 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Yell at Your Robot: Physical Correction as the Collaborative Interface for Language Model Powered Robots
Dec 17, 2024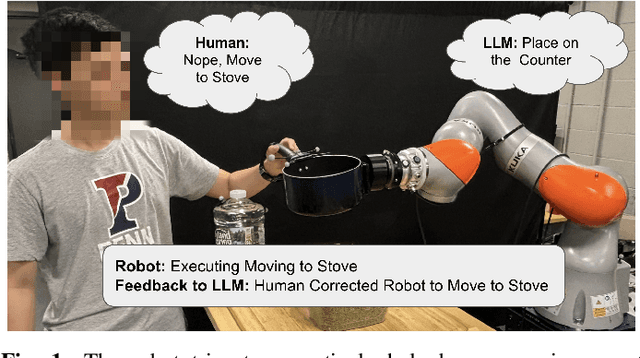



We present a novel approach for enhancing human-robot collaboration using physical interactions for real-time error correction of large language model (LLM) powered robots. Unlike other methods that rely on verbal or text commands, the robot leverages an LLM to proactively executes 6 DoF linear Dynamical System (DS) commands using a description of the scene in natural language. During motion, a human can provide physical corrections, used to re-estimate the desired intention, also parameterized by linear DS. This corrected DS can be converted to natural language and used as part of the prompt to improve future LLM interactions. We provide proof-of-concept result in a hybrid real+sim experiment, showcasing physical interaction as a new possibility for LLM powered human-robot interface.
A Robust Filter for Marker-less Multi-person Tracking in Human-Robot Interaction Scenarios
Jun 03, 2024



Pursuing natural and marker-less human-robot interaction (HRI) has been a long-standing robotics research focus, driven by the vision of seamless collaboration without physical markers. Marker-less approaches promise an improved user experience, but state-of-the-art struggles with the challenges posed by intrinsic errors in human pose estimation (HPE) and depth cameras. These errors can lead to issues such as robot jittering, which can significantly impact the trust users have in collaborative systems. We propose a filtering pipeline that refines incomplete 3D human poses from an HPE backbone and a single RGB-D camera to address these challenges, solving for occlusions that can degrade the interaction. Experimental results show that using the proposed filter leads to more consistent and noise-free motion representation, reducing unexpected robot movements and enabling smoother interaction.