 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBench-RNR: Dataset for Benchmarking Repetitive and Non-repetitive Scanning LiDAR for Infrastructure-based Vehicle Localization
Sep 19, 2025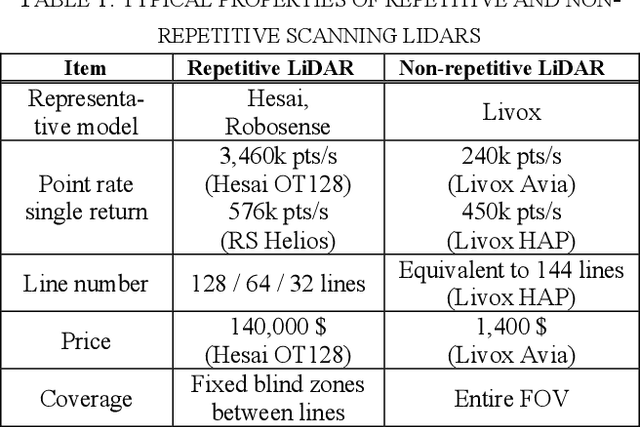
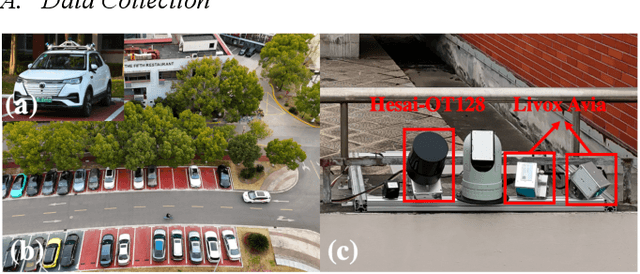
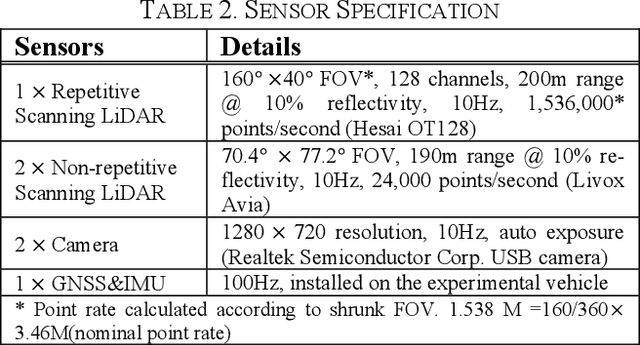
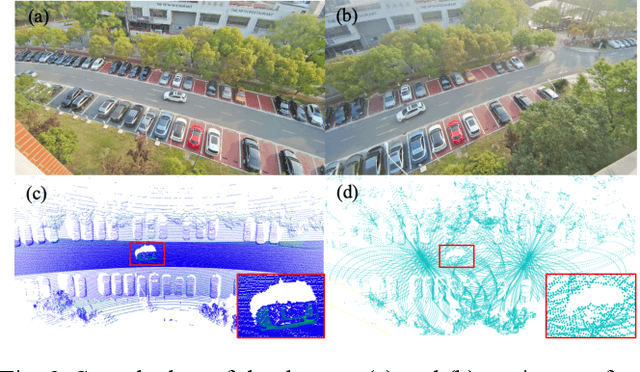
Vehicle localization using roadside LiDARs can provide centimeter-level accuracy for cloud-controlled vehicles while simultaneously serving multiple vehicles, enhanc-ing safety and efficiency. While most existing studies rely on repetitive scanning LiDARs, non-repetitive scanning LiDAR offers advantages such as eliminating blind zones and being more cost-effective. However, its application in roadside perception and localization remains limited. To address this, we present a dataset for infrastructure-based vehicle localization, with data collected from both repetitive and non-repetitive scanning LiDARs, in order to benchmark the performance of different LiDAR scanning patterns. The dataset contains 5,445 frames of point clouds across eight vehicle trajectory sequences, with diverse trajectory types. Our experiments establish base-lines for infrastructure-based vehicle localization and compare the performance of these methods using both non-repetitive and repetitive scanning LiDARs. This work offers valuable insights for selecting the most suitable LiDAR scanning pattern for infrastruc-ture-based vehicle localization. Our dataset is a signifi-cant contribution to the scientific community, supporting advancements in infrastructure-based perception and vehicle localization. The dataset and source code are publicly available at: https://github.com/sjtu-cyberc3/BenchRNR.
Weather-Magician: Reconstruction and Rendering Framework for 4D Weather Synthesis In Real Time
May 26, 2025For tasks such as urban digital twins, VR/AR/game scene design, or creating synthetic films, the traditional industrial approach often involves manually modeling scenes and using various rendering engines to complete the rendering process. This approach typically requires high labor costs and hardware demands, and can result in poor quality when replicating complex real-world scenes. A more efficient approach is to use data from captured real-world scenes, then apply reconstruction and rendering algorithms to quickly recreate the authentic scene. However, current algorithms are unable to effectively reconstruct and render real-world weather effects. To address this, we propose a framework based on gaussian splatting, that can reconstruct real scenes and render them under synthesized 4D weather effects. Our work can simulate various common weather effects by applying Gaussians modeling and rendering techniques. It supports continuous dynamic weather changes and can easily control the details of the effects. Additionally, our work has low hardware requirements and achieves real-time rendering performance. The result demos can be accessed on our project homepage: weathermagician.github.io
Depth-aware Fusion Method based on Image and 4D Radar Spectrum for 3D Object Detection
Feb 21, 2025Safety and reliability are crucial for the public acceptance of autonomous driving. To ensure accurate and reliable environmental perception, intelligent vehicles must exhibit accuracy and robustness in various environments. Millimeter-wave radar, known for its high penetration capability, can operate effectively in adverse weather conditions such as rain, snow, and fog. Traditional 3D millimeter-wave radars can only provide range, Doppler, and azimuth information for objects. Although the recent emergence of 4D millimeter-wave radars has added elevation resolution, the radar point clouds remain sparse due to Constant False Alarm Rate (CFAR) operations. In contrast, cameras offer rich semantic details but are sensitive to lighting and weather conditions. Hence, this paper leverages these two highly complementary and cost-effective sensors, 4D millimeter-wave radar and camera. By integrating 4D radar spectra with depth-aware camera images and employing attention mechanisms, we fuse texture-rich images with depth-rich radar data in the Bird's Eye View (BEV) perspective, enhancing 3D object detection. Additionally, we propose using GAN-based networks to generate depth images from radar spectra in the absence of depth sensors, further improving detection accuracy.
Cross-Modal Visual Relocalization in Prior LiDAR Maps Utilizing Intensity Textures
Dec 02, 2024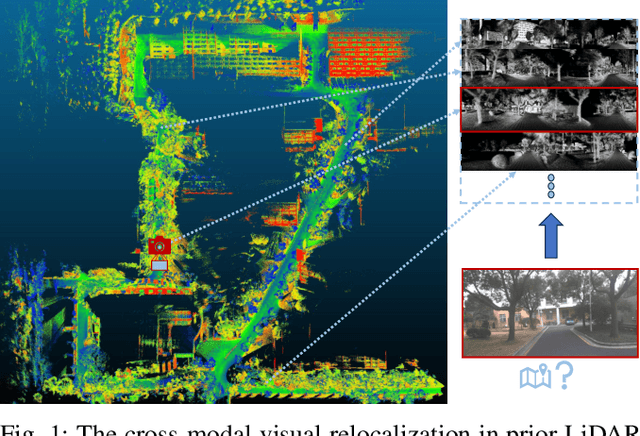

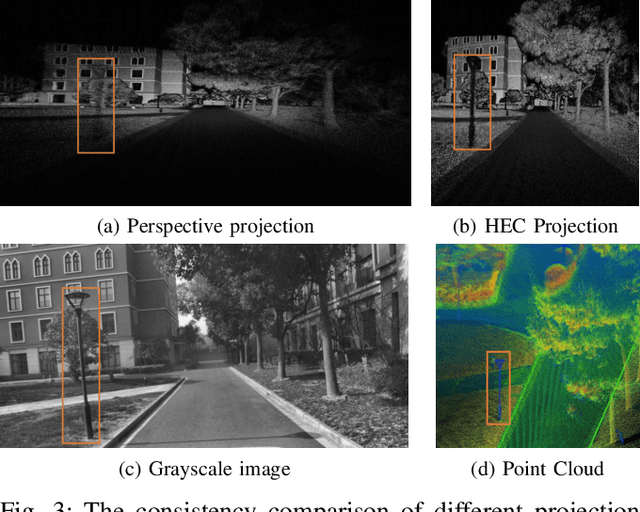
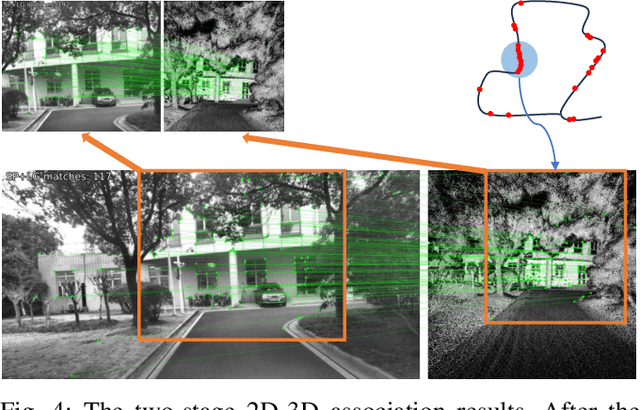
Cross-modal localization has drawn increasing attention in recent years, while the visual relocalization in prior LiDAR maps is less studied. Related methods usually suffer from inconsistency between the 2D texture and 3D geometry, neglecting the intensity features in the LiDAR point cloud. In this paper, we propose a cross-modal visual relocalization system in prior LiDAR maps utilizing intensity textures, which consists of three main modules: map projection, coarse retrieval, and fine relocalization. In the map projection module, we construct the database of intensity channel map images leveraging the dense characteristic of panoramic projection. The coarse retrieval module retrieves the top-K most similar map images to the query image from the database, and retains the top-K' results by covisibility clustering. The fine relocalization module applies a two-stage 2D-3D association and a covisibility inlier selection method to obtain robust correspondences for 6DoF pose estimation. The experimental results on our self-collected datasets demonstrate the effectiveness in both place recognition and pose estimation tasks.
End-to-end Driving in High-Interaction Traffic Scenarios with Reinforcement Learning
Oct 03, 2024Dynamic and interactive traffic scenarios pose significant challenges for autonomous driving systems. Reinforcement learning (RL) offers a promising approach by enabling the exploration of driving policies beyond the constraints of pre-collected datasets and predefined conditions, particularly in complex environments. However, a critical challenge lies in effectively extracting spatial and temporal features from sequences of high-dimensional, multi-modal observations while minimizing the accumulation of errors over time. Additionally, efficiently guiding large-scale RL models to converge on optimal driving policies without frequent failures during the training process remains tricky. We propose an end-to-end model-based RL algorithm named Ramble to address these issues. Ramble processes multi-view RGB images and LiDAR point clouds into low-dimensional latent features to capture the context of traffic scenarios at each time step. A transformer-based architecture is then employed to model temporal dependencies and predict future states. By learning a dynamics model of the environment, Ramble can foresee upcoming traffic events and make more informed, strategic decisions. Our implementation demonstrates that prior experience in feature extraction and decision-making plays a pivotal role in accelerating the convergence of RL models toward optimal driving policies. Ramble achieves state-of-the-art performance regarding route completion rate and driving score on the CARLA Leaderboard 2.0, showcasing its effectiveness in managing complex and dynamic traffic situations.
HOPE: A Reinforcement Learning-based Hybrid Policy Path Planner for Diverse Parking Scenarios
May 31, 2024
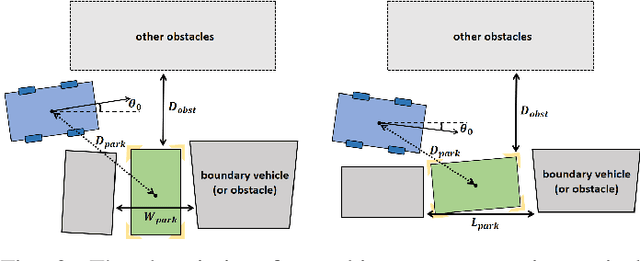


Path planning plays a pivotal role in automated parking, yet current methods struggle to efficiently handle the intricate and diverse parking scenarios. One potential solution is the reinforcement learning-based method, leveraging its exploration in unrecorded situations. However, a key challenge lies in training reinforcement learning methods is the inherent randomness in converging to a feasible policy. This paper introduces a novel solution, the Hybrid POlicy Path plannEr (HOPE), which integrates a reinforcement learning agent with Reeds-Shepp curves, enabling effective planning across diverse scenarios. The paper presents a method to calculate and implement an action mask mechanism in path planning, significantly boosting the efficiency and effectiveness of reinforcement learning training. A transformer is employed as the network structure to fuse environmental information and generate planned paths. To facilitate the training and evaluation of the proposed planner, we propose a criterion for categorizing the difficulty level of parking scenarios based on space and obstacle distribution. Experimental results demonstrate that our approach outperforms typical rule-based algorithms and traditional reinforcement learning methods, showcasing higher planning success rates and generalization across various scenarios. The code for our solution will be openly available on \href{GitHub}{https://github.com/jiamiya/HOPE}. % after the paper's acceptance.
AMFD: Distillation via Adaptive Multimodal Fusion for Multispectral Pedestrian Detection
May 21, 2024Multispectral pedestrian detection has been shown to be effective in improving performance within complex illumination scenarios. However, prevalent double-stream networks in multispectral detection employ two separate feature extraction branches for multi-modal data, leading to nearly double the inference time compared to single-stream networks utilizing only one feature extraction branch. This increased inference time has hindered the widespread employment of multispectral pedestrian detection in embedded devices for autonomous systems. To address this limitation, various knowledge distillation methods have been proposed. However, traditional distillation methods focus only on the fusion features and ignore the large amount of information in the original multi-modal features, thereby restricting the student network's performance. To tackle the challenge, we introduce the Adaptive Modal Fusion Distillation (AMFD) framework, which can fully utilize the original modal features of the teacher network. Specifically, a Modal Extraction Alignment (MEA) module is utilized to derive learning weights for student networks, integrating focal and global attention mechanisms. This methodology enables the student network to acquire optimal fusion strategies independent from that of teacher network without necessitating an additional feature fusion module. Furthermore, we present the SMOD dataset, a well-aligned challenging multispectral dataset for detection. Extensive experiments on the challenging KAIST, LLVIP and SMOD datasets are conducted to validate the effectiveness of AMFD. The results demonstrate that our method outperforms existing state-of-the-art methods in both reducing log-average Miss Rate and improving mean Average Precision. The code is available at https://github.com/bigD233/AMFD.git.
A Survey of Simulators for Autonomous Driving: Taxonomy, Challenges, and Evaluation Metrics
Nov 18, 2023Simulators have irreplaceable importance for the research and development of autonomous driving. Besides saving resources, labor, and time, simulation is the only feasible way to reproduce many severe accident scenarios. Despite their widespread adoption across academia and industry, there is an absence in the evolutionary trajectory of simulators and critical discourse on their limitations. To bridge the gap in research, this paper conducts an in-depth review of simulators for autonomous driving. It delineates the three-decade development into three stages: specialized development period, gap period, and comprehensive development, from which it detects a trend of implementing comprehensive functionalities and open-source accessibility. Then it classifies the simulators by functions, identifying five categories: traffic flow simulator, vehicle dynamics simulator, scenario editor, sensory data generator, and driving strategy validator. Simulators that amalgamate diverse features are defined as comprehensive simulators. By investigating commercial and open-source simulators, this paper reveals that the critical issues faced by simulators primarily revolve around fidelity and efficiency concerns. This paper justifies that enhancing the realism of adverse weather simulation, automated map reconstruction, and interactive traffic participants will bolster credibility. Concurrently, headless simulation and multiple-speed simulation techniques will exploit the theoretic advantages. Moreover, this paper delves into potential solutions for the identified issues. It explores qualitative and quantitative evaluation metrics to assess the simulator's performance. This paper guides users to find suitable simulators efficiently and provides instructive suggestions for developers to improve simulator efficacy purposefully.
SUNet: Scale-aware Unified Network for Panoptic Segmentation
Sep 07, 2022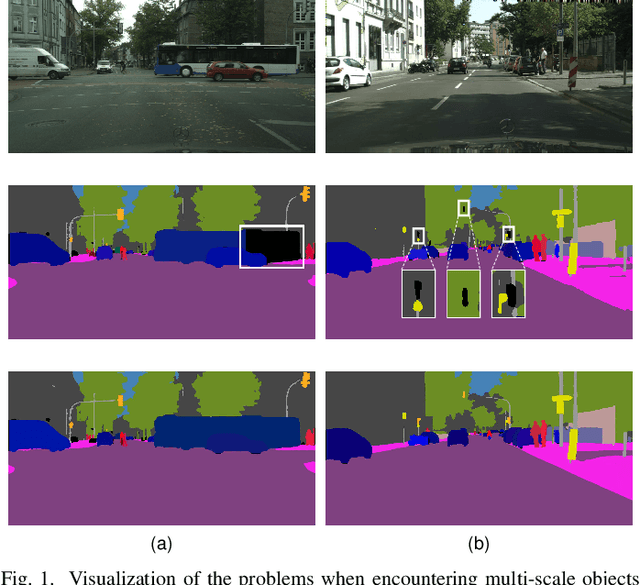
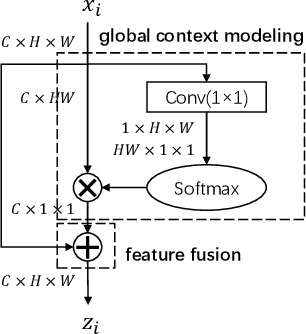
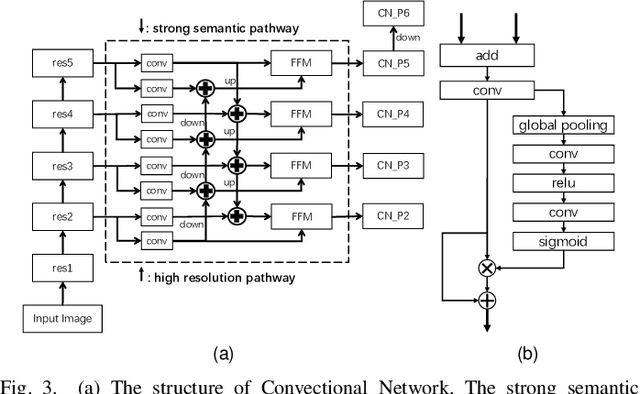
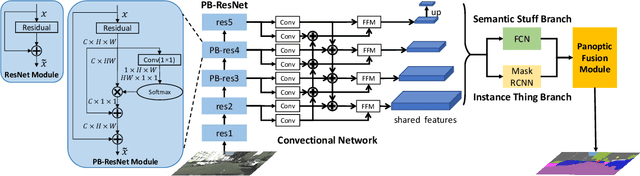
Panoptic segmentation combines the advantages of semantic and instance segmentation, which can provide both pixel-level and instance-level environmental perception information for intelligent vehicles. However, it is challenged with segmenting objects of various scales, especially on extremely large and small ones. In this work, we propose two lightweight modules to mitigate this problem. First, Pixel-relation Block is designed to model global context information for large-scale things, which is based on a query-independent formulation and brings small parameter increments. Then, Convectional Network is constructed to collect extra high-resolution information for small-scale stuff, supplying more appropriate semantic features for the downstream segmentation branches. Based on these two modules, we present an end-to-end Scale-aware Unified Network (SUNet), which is more adaptable to multi-scale objects. Extensive experiments on Cityscapes and COCO demonstrate the effectiveness of the proposed methods.
Threshold-adaptive Unsupervised Focal Loss for Domain Adaptation of Semantic Segmentation
Aug 23, 2022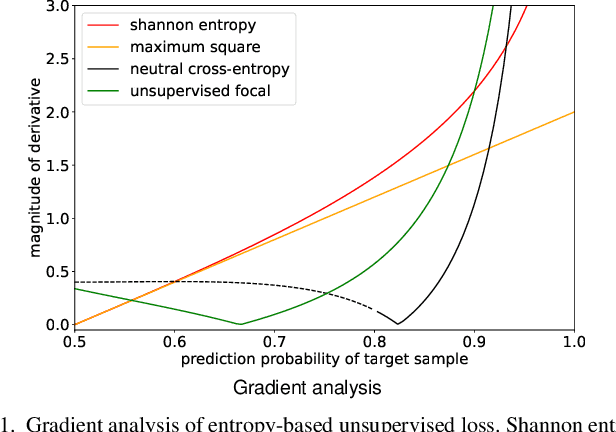
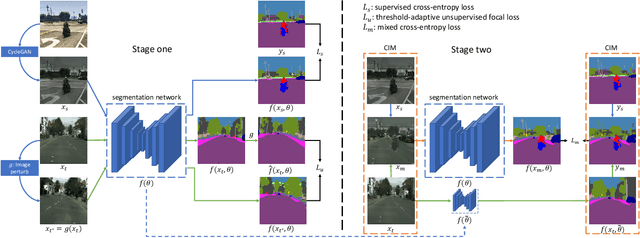
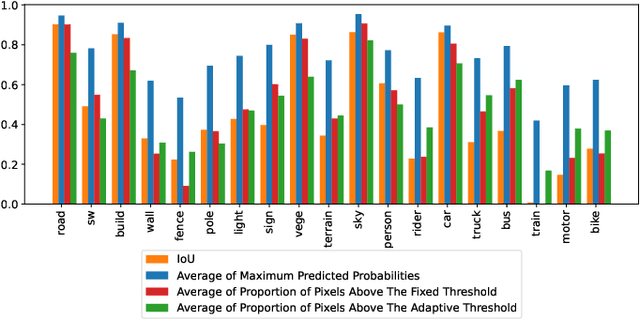
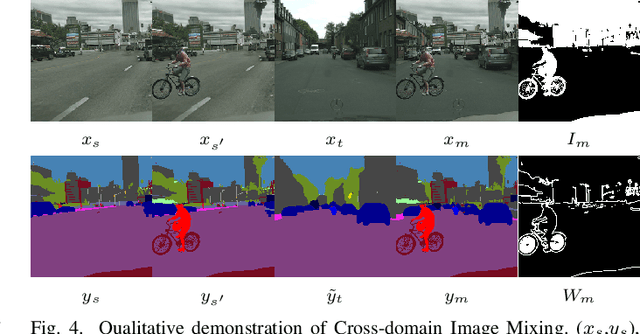
Semantic segmentation is an important task for intelligent vehicles to understand the environment. Current deep learning methods require large amounts of labeled data for training. Manual annotation is expensive, while simulators can provide accurate annotations. However, the performance of the semantic segmentation model trained with the data of the simulator will significantly decrease when applied in the actual scene. Unsupervised domain adaptation (UDA) for semantic segmentation has recently gained increasing research attention, aiming to reduce the domain gap and improve the performance on the target domain. In this paper, we propose a novel two-stage entropy-based UDA method for semantic segmentation. In stage one, we design a threshold-adaptative unsupervised focal loss to regularize the prediction in the target domain, which has a mild gradient neutralization mechanism and mitigates the problem that hard samples are barely optimized in entropy-based methods. In stage two, we introduce a data augmentation method named cross-domain image mixing (CIM) to bridge the semantic knowledge from two domains. Our method achieves state-of-the-art 58.4% and 59.6% mIoUs on SYNTHIA-to-Cityscapes and GTA5-to-Cityscapes using DeepLabV2 and competitive performance using the lightweight BiSeNet.