 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap-Enhanced Ego-Lane Detection in the Missing Feature Scenarios
Paper and Code
Apr 04, 2020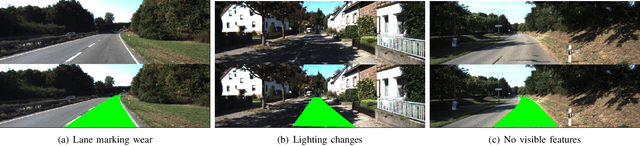
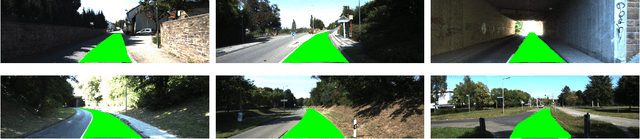
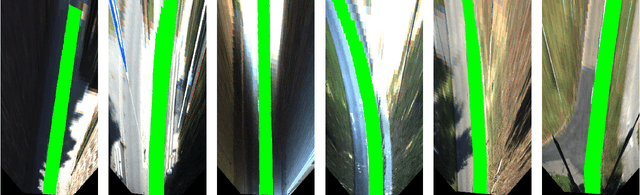
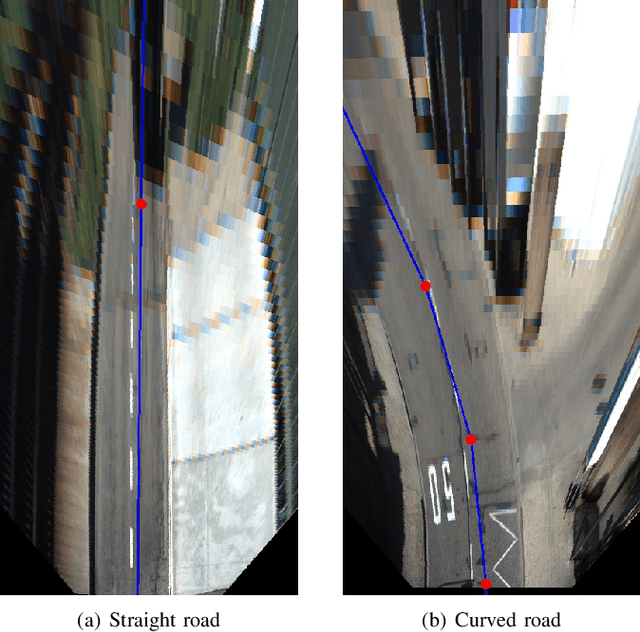
As one of the most important tasks in autonomous driving systems, ego-lane detection has been extensively studied and has achieved impressive results in many scenarios. However, ego-lane detection in the missing feature scenarios is still an unsolved problem. To address this problem, previous methods have been devoted to proposing more complicated feature extraction algorithms, but they are very time-consuming and cannot deal with extreme scenarios. Different from others, this paper exploits prior knowledge contained in digital maps, which has a strong capability to enhance the performance of detection algorithms. Specifically, we employ the road shape extracted from OpenStreetMap as lane model, which is highly consistent with the real lane shape and irrelevant to lane features. In this way, only a few lane features are needed to eliminate the position error between the road shape and the real lane, and a search-based optimization algorithm is proposed. Experiments show that the proposed method can be applied to various scenarios and can run in real-time at a frequency of 20 Hz. At the same time, we evaluated the proposed method on the public KITTI Lane dataset where it achieves state-of-the-art performance. Moreover, our code will be open source after publication.