 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIMO Array Calibration in Non-stationary Channels with Residual Surfaces and Slepian Spherical Harmonics
Jan 16, 2026The fundamental mechanism driving MIMO beamforming is the relative phases of signals departing the transmit array and arriving at the receive array. If a propagation channel affects all transmitted signals equally, the relative phases are a function of the directions of departure and arrival, as well as the transmit and receive hardware. In a non-stationary channel, the amplitudes and phases of arriving signals may vary significantly over time, making it infeasible to directly measure the influence of hardware. In this paper, we present a calibration method for achieving indirect measurement and compensation of hardware influences in non-stationary channels. Our method characterizes the patterns of array elements relative to a reference element and estimates these relative patterns, termed residual surfaces, using a Slepian spherical harmonic basis. Using simulations, we demonstrate that our calibration method achieves beamforming gains that closely match theoretical optimums. Our results also show a reduction in the error in estimating the target direction, lower side lobes, and improve null-steering capabilities.
Mapping Extended Landmarks for Radar SLAM
Oct 31, 2022



Simultaneous localization and mapping (SLAM) using automotive radar sensors can provide enhanced sensing capabilities for autonomous systems. In SLAM applications, with a greater requirement for the environment map, information on the extent of landmarks is vital for precise navigation and path planning. Although object extent estimation has been successfully applied in target tracking, its adaption to SLAM remains unaddressed due to the additional uncertainty of the sensor platform, bias in the odometer reading, as well as the measurement non-linearity. In this paper, we propose to incorporate the Bayesian random matrix approach to estimate the extent of landmarks in radar SLAM. We describe the details for implementation of landmark extent initialization, prediction and update. To validate the performance of our proposed approach we compare with the model-free ellipse fitting algorithm with results showing more consistent extent estimation. We also demonstrate that exploiting the landmark extent in the state update can improve localization accuracy.
Landmark Management in the Application of Radar SLAM
Sep 15, 2022
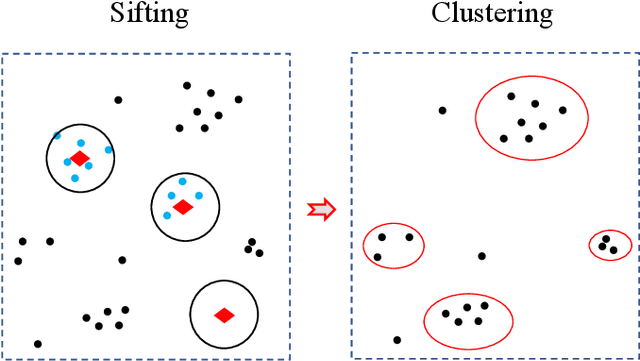
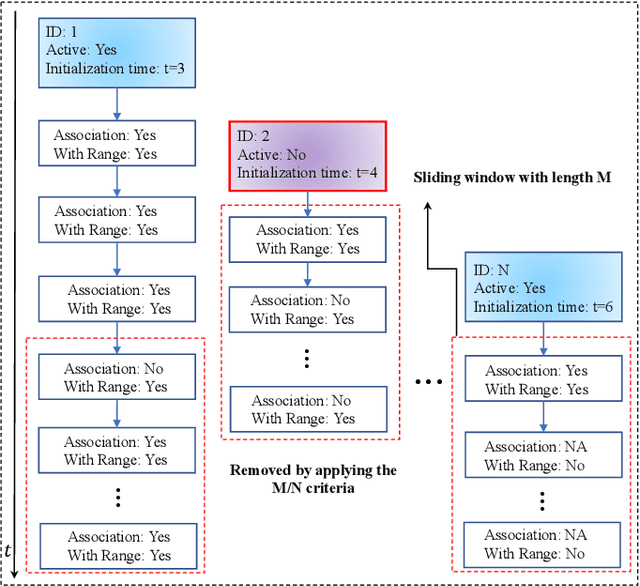

This paper focuses on efficient landmark management in radar based simultaneous localization and mapping (SLAM). Landmark management is necessary in order to maintain a consistent map of the estimated landmarks relative to the estimate of the platform's pose. This task is particularly important when faced with multiple detections from the same landmark and/or dynamic environments where the location of a landmark can change. A further challenge with radar data is the presence of false detections. Accordingly, we propose a simple yet efficient rule based solution for radar SLAM landmark management. Assuming a low-dynamic environment, there are several steps in our solution: new landmarks need to be detected and included, false landmarks need to be identified and removed, and the consistency of the landmarks registered in the map needs to be maintained. To illustrate our solution, we run an extended Kalman filter SLAM algorithm in an environment containing both stationary and temporally stationary landmarks. Our simulation results demonstrate that the proposed solution is capable of reliably managing landmarks even when faced with false detections and multiple detections from the same landmark.
Gravity aided navigation using Viterbi map matching algorithm
Apr 22, 2022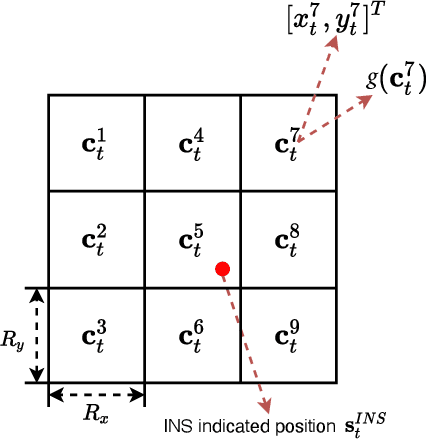
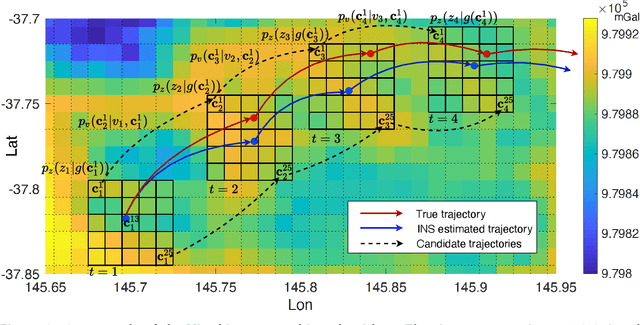
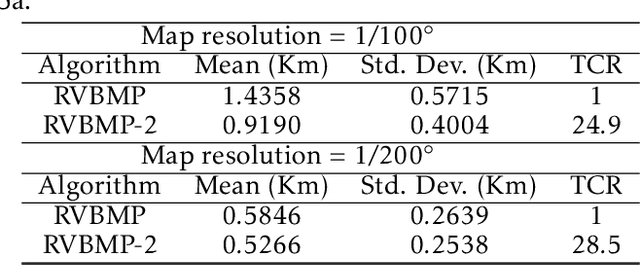
In GNSS-denied environments, aiding a vehicle's inertial navigation system (INS) is crucial to reducing the accumulated navigation drift caused by sensor errors (e.g. bias and noise). One potential solution is to use measurements of gravity as an aiding source. The measurements are matched to a geo-referenced map of Earth's gravity in order to estimate the vehicle's position. In this paper, we propose a novel formulation of the map matching problem using a hidden Markov model (HMM). Specifically, we treat the spatial cells of the map as the hidden states of the HMM and present a Viterbi style algorithm to estimate the most likely sequence of states, i.e. most likely sequence of vehicle positions, that results in the sequence of observed gravity measurements. Using a realistic gravity map, we demonstrate the accuracy of our Viterbi map matching algorithm in a navigation scenario and illustrate its robustness compared to existing methods.
Probabilistic Map Matching for Robust Inertial Navigation Aiding
Mar 31, 2022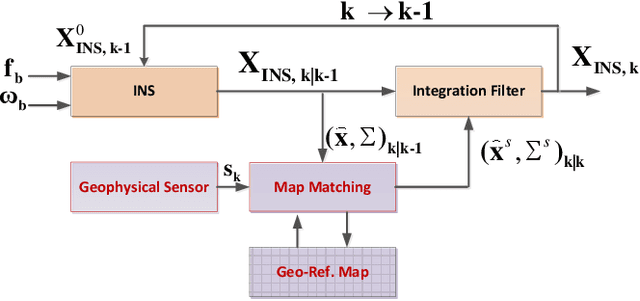
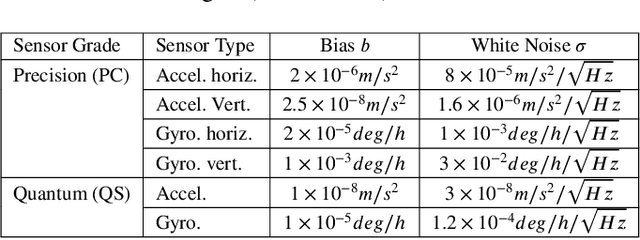
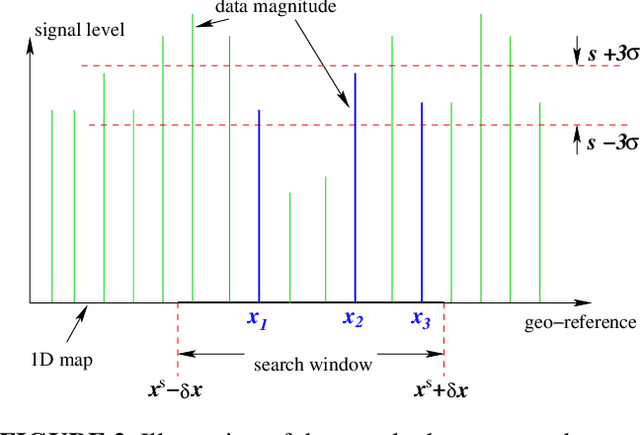

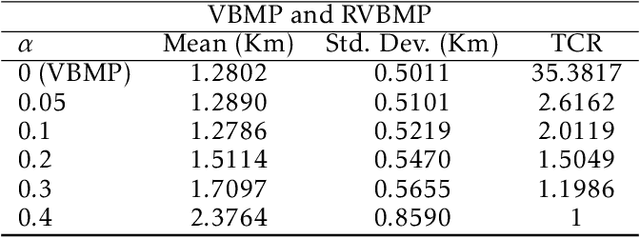
Robust aiding of inertial navigation systems in GNSS-denied environments is critical for the removal of accumulated navigation error caused by the drift and bias inherent in inertial sensors. One way to perform such an aiding uses matching of geophysical measurements, such as gravimetry, gravity gradiometry or magnetometry, with a known geo-referenced map. Although simple in concept, this map matching procedure is challenging: the measurements themselves are noisy; their associated spatial location is uncertain; and the measurements may match multiple points within the map (i.e. non-unique solution). In this paper, we propose a probabilistic multiple hypotheses tracker to solve the map matching problem and allow robust inertial navigation aiding. Our approach addresses the problem both locally, via probabilistic data association, and temporally by incorporating the underlying platform kinematic constraints into the tracker. The map matching output is then integrated into the navigation system using an unscented Kalman filter. Additionally, we present a statistical measure of local map information density -- the map feature variability -- and use it to weight the output covariance of the proposed algorithm. The effectiveness and robustness of the proposed algorithm are demonstrated using a navigation scenario involving gravitational map matching.
LAPNet: Non-rigid Registration derived in k-space for Magnetic Resonance Imaging
Jul 19, 2021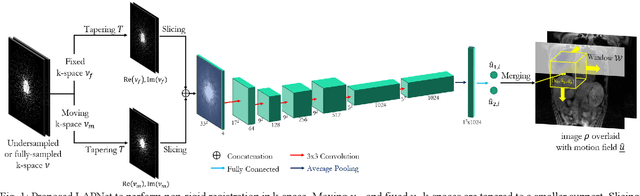
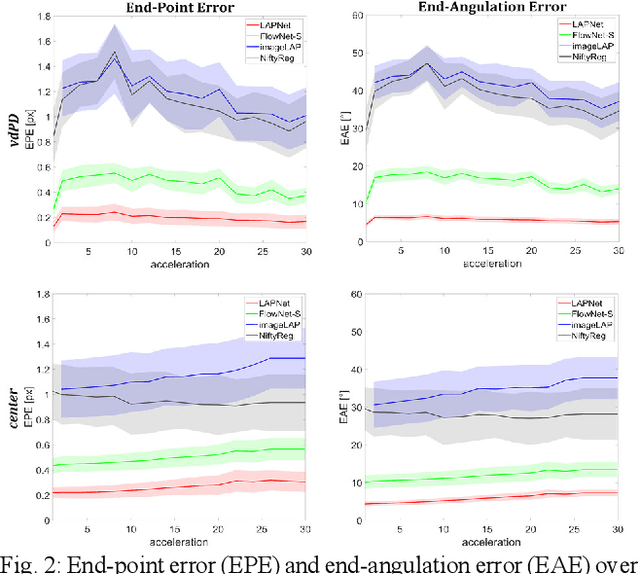
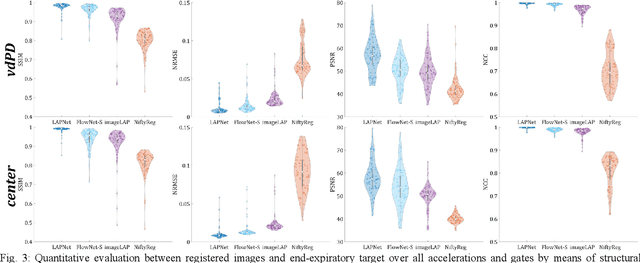
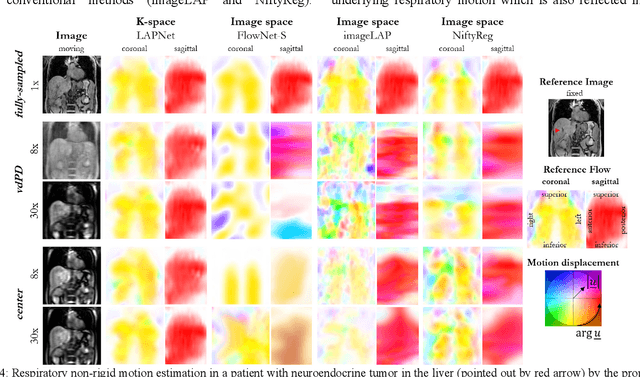
Physiological motion, such as cardiac and respiratory motion, during Magnetic Resonance (MR) image acquisition can cause image artifacts. Motion correction techniques have been proposed to compensate for these types of motion during thoracic scans, relying on accurate motion estimation from undersampled motion-resolved reconstruction. A particular interest and challenge lie in the derivation of reliable non-rigid motion fields from the undersampled motion-resolved data. Motion estimation is usually formulated in image space via diffusion, parametric-spline, or optical flow methods. However, image-based registration can be impaired by remaining aliasing artifacts due to the undersampled motion-resolved reconstruction. In this work, we describe a formalism to perform non-rigid registration directly in the sampled Fourier space, i.e. k-space. We propose a deep-learning based approach to perform fast and accurate non-rigid registration from the undersampled k-space data. The basic working principle originates from the Local All-Pass (LAP) technique, a recently introduced optical flow-based registration. The proposed LAPNet is compared against traditional and deep learning image-based registrations and tested on fully-sampled and highly-accelerated (with two undersampling strategies) 3D respiratory motion-resolved MR images in a cohort of 40 patients with suspected liver or lung metastases and 25 healthy subjects. The proposed LAPNet provided consistent and superior performance to image-based approaches throughout different sampling trajectories and acceleration factors.
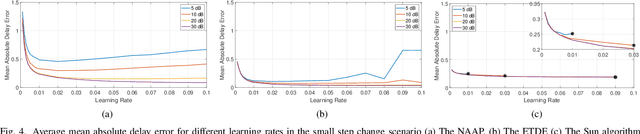
An Adaptive All-Pass Filter for Time-Varying Delay Estimation
Jan 07, 2021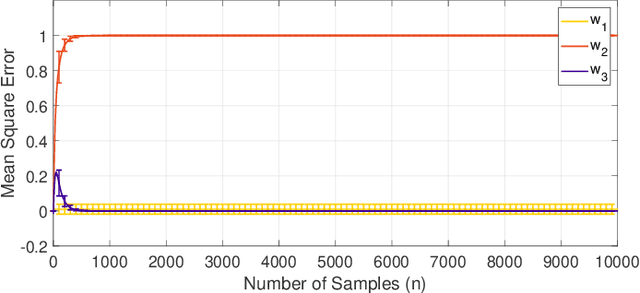
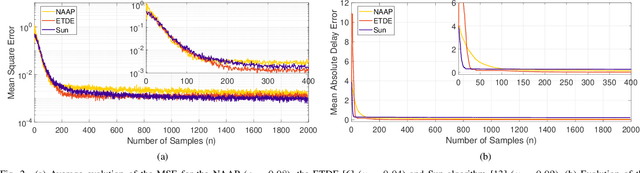
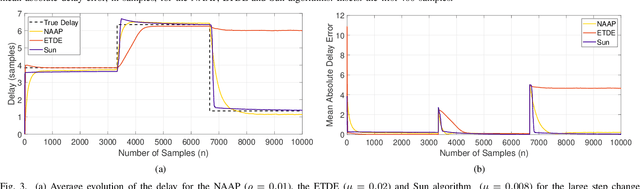
The focus of this paper is the estimation of a delay between two signals. Such a problem is common in signal processing and particularly challenging when the delay is non-stationary in nature. Our proposed solution is based on an all-pass filter framework comprising of two elements: a time delay is equivalent to all-pass filtering and an all-pass filter can be represented in terms of a ratio of a finite impulse response (FIR) filter and its time reversal. Using these elements, we propose an adaptive filtering algorithm with an LMS style update that estimates the FIR filter coefficients and the time delay. Specifically, at each time step, the algorithm updates the filter coefficients based on a gradient descent update and then extracts an estimate of the time delay from the filter. We validate our algorithm on synthetic data demonstrating that it is both accurate and capable of tracking time-varying delays.