 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLandmark Management in the Application of Radar SLAM
Paper and Code

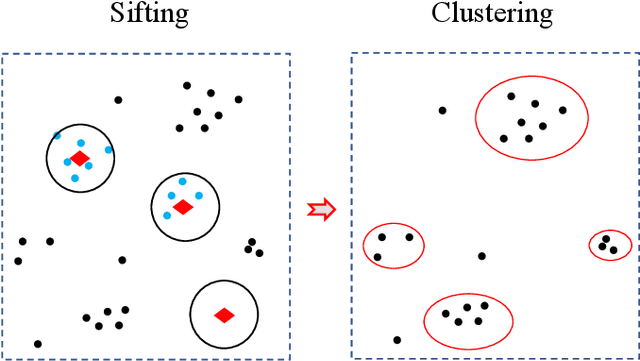
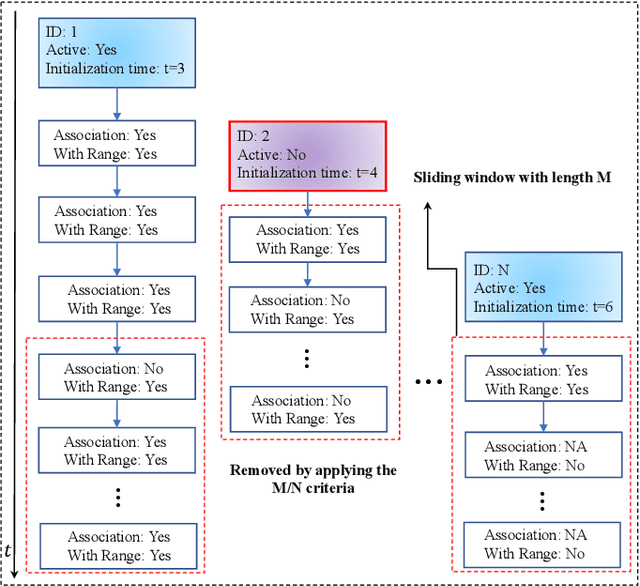

This paper focuses on efficient landmark management in radar based simultaneous localization and mapping (SLAM). Landmark management is necessary in order to maintain a consistent map of the estimated landmarks relative to the estimate of the platform's pose. This task is particularly important when faced with multiple detections from the same landmark and/or dynamic environments where the location of a landmark can change. A further challenge with radar data is the presence of false detections. Accordingly, we propose a simple yet efficient rule based solution for radar SLAM landmark management. Assuming a low-dynamic environment, there are several steps in our solution: new landmarks need to be detected and included, false landmarks need to be identified and removed, and the consistency of the landmarks registered in the map needs to be maintained. To illustrate our solution, we run an extended Kalman filter SLAM algorithm in an environment containing both stationary and temporally stationary landmarks. Our simulation results demonstrate that the proposed solution is capable of reliably managing landmarks even when faced with false detections and multiple detections from the same landmark.