 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping Extended Landmarks for Radar SLAM
Oct 31, 2022



Simultaneous localization and mapping (SLAM) using automotive radar sensors can provide enhanced sensing capabilities for autonomous systems. In SLAM applications, with a greater requirement for the environment map, information on the extent of landmarks is vital for precise navigation and path planning. Although object extent estimation has been successfully applied in target tracking, its adaption to SLAM remains unaddressed due to the additional uncertainty of the sensor platform, bias in the odometer reading, as well as the measurement non-linearity. In this paper, we propose to incorporate the Bayesian random matrix approach to estimate the extent of landmarks in radar SLAM. We describe the details for implementation of landmark extent initialization, prediction and update. To validate the performance of our proposed approach we compare with the model-free ellipse fitting algorithm with results showing more consistent extent estimation. We also demonstrate that exploiting the landmark extent in the state update can improve localization accuracy.
Landmark Management in the Application of Radar SLAM
Sep 15, 2022
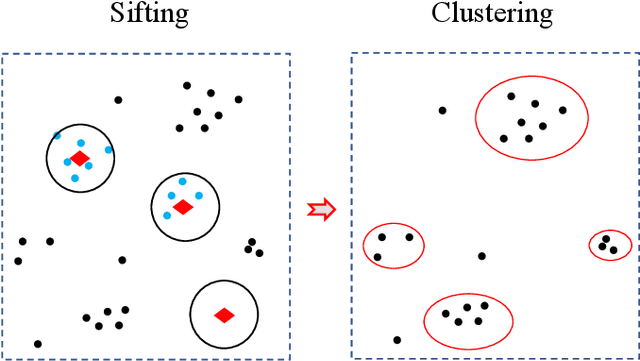
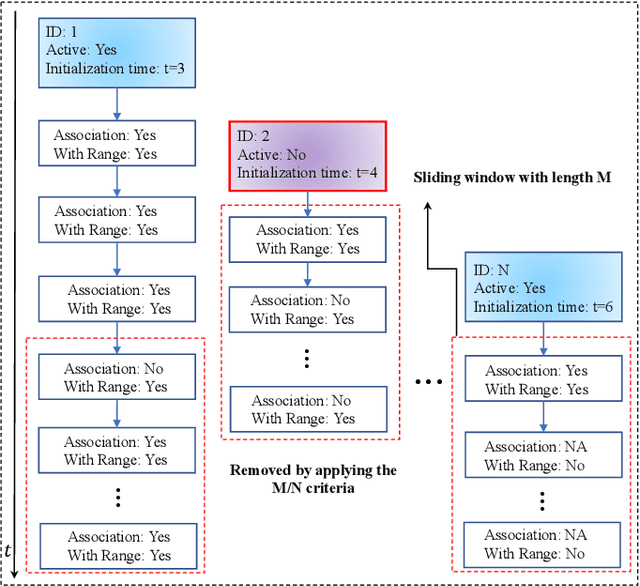

This paper focuses on efficient landmark management in radar based simultaneous localization and mapping (SLAM). Landmark management is necessary in order to maintain a consistent map of the estimated landmarks relative to the estimate of the platform's pose. This task is particularly important when faced with multiple detections from the same landmark and/or dynamic environments where the location of a landmark can change. A further challenge with radar data is the presence of false detections. Accordingly, we propose a simple yet efficient rule based solution for radar SLAM landmark management. Assuming a low-dynamic environment, there are several steps in our solution: new landmarks need to be detected and included, false landmarks need to be identified and removed, and the consistency of the landmarks registered in the map needs to be maintained. To illustrate our solution, we run an extended Kalman filter SLAM algorithm in an environment containing both stationary and temporally stationary landmarks. Our simulation results demonstrate that the proposed solution is capable of reliably managing landmarks even when faced with false detections and multiple detections from the same landmark.
An Adaptive All-Pass Filter for Time-Varying Delay Estimation
Jan 07, 2021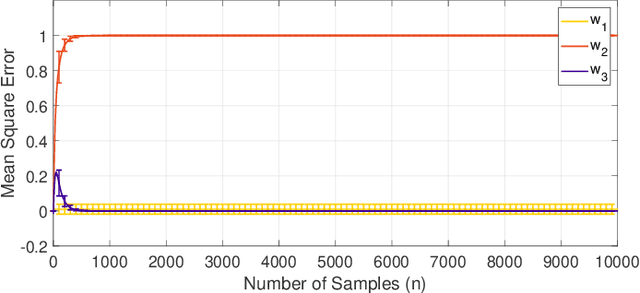
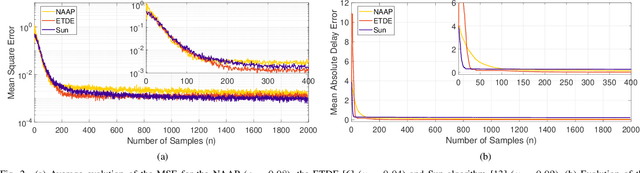
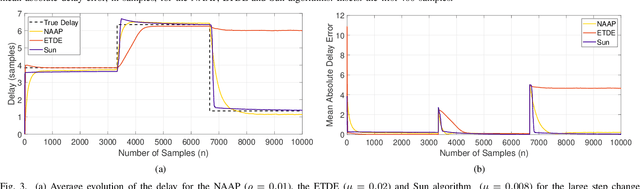
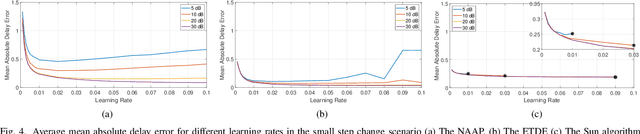
The focus of this paper is the estimation of a delay between two signals. Such a problem is common in signal processing and particularly challenging when the delay is non-stationary in nature. Our proposed solution is based on an all-pass filter framework comprising of two elements: a time delay is equivalent to all-pass filtering and an all-pass filter can be represented in terms of a ratio of a finite impulse response (FIR) filter and its time reversal. Using these elements, we propose an adaptive filtering algorithm with an LMS style update that estimates the FIR filter coefficients and the time delay. Specifically, at each time step, the algorithm updates the filter coefficients based on a gradient descent update and then extracts an estimate of the time delay from the filter. We validate our algorithm on synthetic data demonstrating that it is both accurate and capable of tracking time-varying delays.