 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGUI-360$^\circ$: A Comprehensive Dataset and Benchmark for Computer-Using Agents
Nov 10, 2025We introduce GUI-360$^\circ$, a large-scale, comprehensive dataset and benchmark suite designed to advance computer-using agents (CUAs). CUAs present unique challenges and is constrained by three persistent gaps: a scarcity of real-world CUA tasks, the lack of automated collection-and-annotation pipelines for multi-modal trajectories, and the absence of a unified benchmark that jointly evaluates GUI grounding, screen parsing, and action prediction. GUI-360$^\circ$ addresses these gaps with an LLM-augmented, largely automated pipeline for query sourcing, environment-template construction, task instantiation, batched execution, and LLM-driven quality filtering. The released corpus contains over 1.2M executed action steps across thousands of trajectories in popular Windows office applications, and includes full-resolution screenshots, accessibility metadata when available, instantiated goals, intermediate reasoning traces, and both successful and failed action trajectories. The dataset supports three canonical tasks, GUI grounding, screen parsing, and action prediction, and a hybrid GUI+API action space that reflects modern agent designs. Benchmarking state-of-the-art vision--language models on GUI-360$^\circ$ reveals substantial out-of-the-box shortcomings in grounding and action prediction; supervised fine-tuning and reinforcement learning yield significant gains but do not close the gap to human-level reliability. We release GUI-360$^\circ$ and accompanying code to facilitate reproducible research and accelerate progress on robust desktop CUAs. The full dataset has been made public on https://huggingface.co/datasets/vyokky/GUI-360.
GUI-360: A Comprehensive Dataset and Benchmark for Computer-Using Agents
Nov 06, 2025We introduce GUI-360$^\circ$, a large-scale, comprehensive dataset and benchmark suite designed to advance computer-using agents (CUAs). CUAs present unique challenges and is constrained by three persistent gaps: a scarcity of real-world CUA tasks, the lack of automated collection-and-annotation pipelines for multi-modal trajectories, and the absence of a unified benchmark that jointly evaluates GUI grounding, screen parsing, and action prediction. GUI-360$^\circ$ addresses these gaps with an LLM-augmented, largely automated pipeline for query sourcing, environment-template construction, task instantiation, batched execution, and LLM-driven quality filtering. The released corpus contains over 1.2M executed action steps across thousands of trajectories in popular Windows office applications, and includes full-resolution screenshots, accessibility metadata when available, instantiated goals, intermediate reasoning traces, and both successful and failed action trajectories. The dataset supports three canonical tasks, GUI grounding, screen parsing, and action prediction, and a hybrid GUI+API action space that reflects modern agent designs. Benchmarking state-of-the-art vision--language models on GUI-360$^\circ$ reveals substantial out-of-the-box shortcomings in grounding and action prediction; supervised fine-tuning and reinforcement learning yield significant gains but do not close the gap to human-level reliability. We release GUI-360$^\circ$ and accompanying code to facilitate reproducible research and accelerate progress on robust desktop CUAs. The full dataset has been made public on https://huggingface.co/datasets/vyokky/GUI-360.
UFO2: The Desktop AgentOS
Apr 20, 2025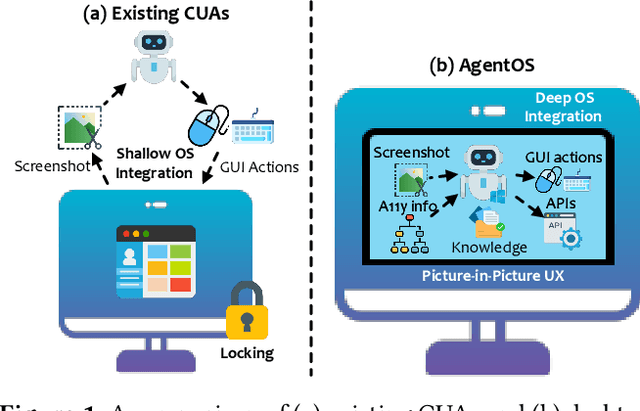
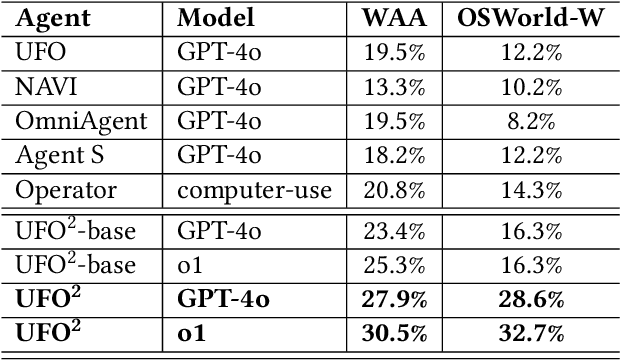
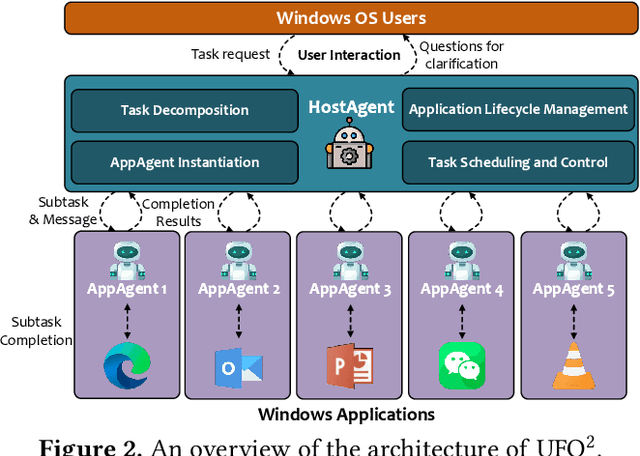
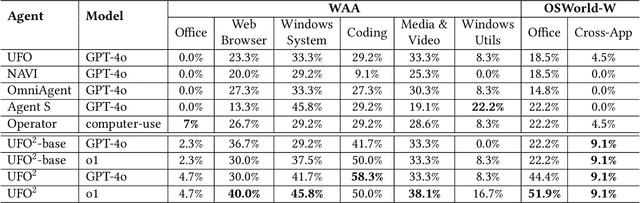
Recent Computer-Using Agents (CUAs), powered by multimodal large language models (LLMs), offer a promising direction for automating complex desktop workflows through natural language. However, most existing CUAs remain conceptual prototypes, hindered by shallow OS integration, fragile screenshot-based interaction, and disruptive execution. We present UFO2, a multiagent AgentOS for Windows desktops that elevates CUAs into practical, system-level automation. UFO2 features a centralized HostAgent for task decomposition and coordination, alongside a collection of application-specialized AppAgent equipped with native APIs, domain-specific knowledge, and a unified GUI--API action layer. This architecture enables robust task execution while preserving modularity and extensibility. A hybrid control detection pipeline fuses Windows UI Automation (UIA) with vision-based parsing to support diverse interface styles. Runtime efficiency is further enhanced through speculative multi-action planning, reducing per-step LLM overhead. Finally, a Picture-in-Picture (PiP) interface enables automation within an isolated virtual desktop, allowing agents and users to operate concurrently without interference. We evaluate UFO2 across over 20 real-world Windows applications, demonstrating substantial improvements in robustness and execution accuracy over prior CUAs. Our results show that deep OS integration unlocks a scalable path toward reliable, user-aligned desktop automation.
Vision meets mmWave Radar: 3D Object Perception Benchmark for Autonomous Driving
Nov 17, 2023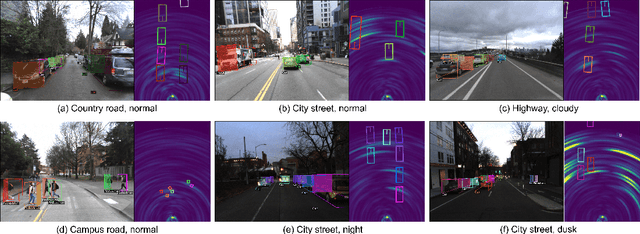
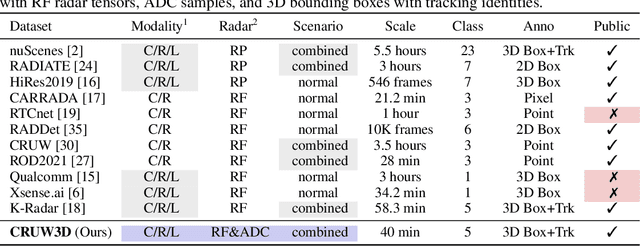
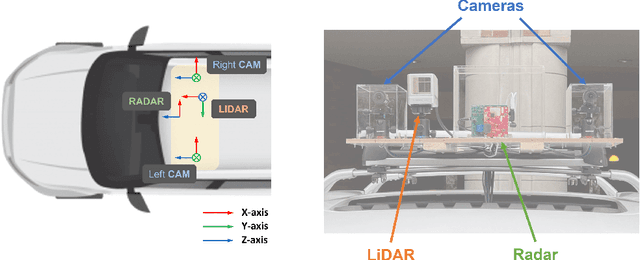
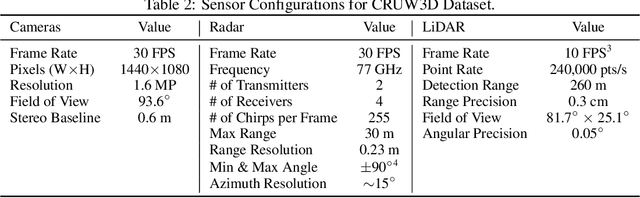
Sensor fusion is crucial for an accurate and robust perception system on autonomous vehicles. Most existing datasets and perception solutions focus on fusing cameras and LiDAR. However, the collaboration between camera and radar is significantly under-exploited. The incorporation of rich semantic information from the camera, and reliable 3D information from the radar can potentially achieve an efficient, cheap, and portable solution for 3D object perception tasks. It can also be robust to different lighting or all-weather driving scenarios due to the capability of mmWave radars. In this paper, we introduce the CRUW3D dataset, including 66K synchronized and well-calibrated camera, radar, and LiDAR frames in various driving scenarios. Unlike other large-scale autonomous driving datasets, our radar data is in the format of radio frequency (RF) tensors that contain not only 3D location information but also spatio-temporal semantic information. This kind of radar format can enable machine learning models to generate more reliable object perception results after interacting and fusing the information or features between the camera and radar.
Blind Inpainting with Object-aware Discrimination for Artificial Marker Removal
Mar 27, 2023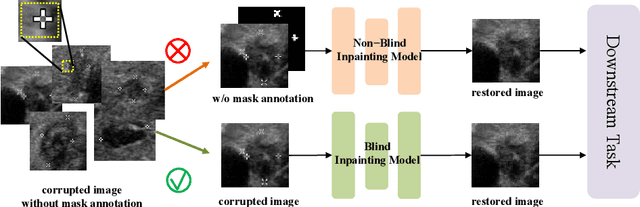



Medical images often contain artificial markers added by doctors, which can negatively affect the accuracy of AI-based diagnosis. To address this issue and recover the missing visual contents, inpainting techniques are highly needed. However, existing inpainting methods require manual mask input, limiting their application scenarios. In this paper, we introduce a novel blind inpainting method that automatically completes visual contents without specifying masks for target areas in an image. Our proposed model includes a mask-free reconstruction network and an object-aware discriminator. The reconstruction network consists of two branches that predict the corrupted regions with artificial markers and simultaneously recover the missing visual contents. The object-aware discriminator relies on the powerful recognition capabilities of the dense object detector to ensure that the markers of reconstructed images cannot be detected in any local regions. As a result, the reconstructed image can be close to the clean one as much as possible. Our proposed method is evaluated on different medical image datasets, covering multiple imaging modalities such as ultrasound (US), magnetic resonance imaging (MRI), and electron microscopy (EM), demonstrating that our method is effective and robust against various unknown missing region patterns.