 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision meets mmWave Radar: 3D Object Perception Benchmark for Autonomous Driving
Paper and Code
Nov 17, 2023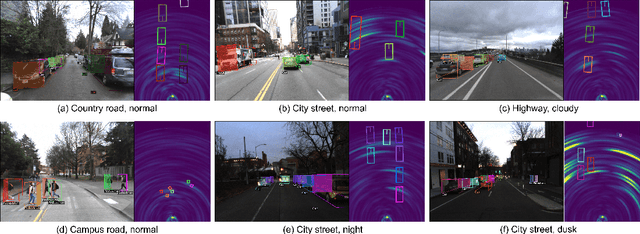
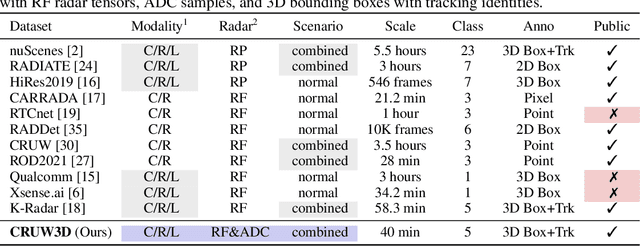
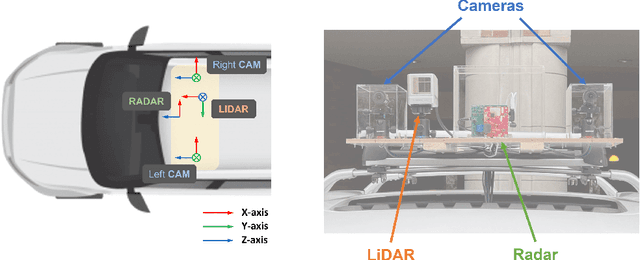
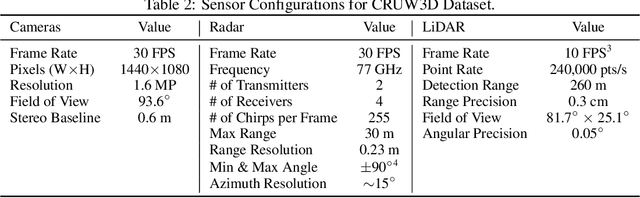
Sensor fusion is crucial for an accurate and robust perception system on autonomous vehicles. Most existing datasets and perception solutions focus on fusing cameras and LiDAR. However, the collaboration between camera and radar is significantly under-exploited. The incorporation of rich semantic information from the camera, and reliable 3D information from the radar can potentially achieve an efficient, cheap, and portable solution for 3D object perception tasks. It can also be robust to different lighting or all-weather driving scenarios due to the capability of mmWave radars. In this paper, we introduce the CRUW3D dataset, including 66K synchronized and well-calibrated camera, radar, and LiDAR frames in various driving scenarios. Unlike other large-scale autonomous driving datasets, our radar data is in the format of radio frequency (RF) tensors that contain not only 3D location information but also spatio-temporal semantic information. This kind of radar format can enable machine learning models to generate more reliable object perception results after interacting and fusing the information or features between the camera and radar.