 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpectral Condition for $μ$P under Width-Depth Scaling
Feb 28, 2026Generative foundation models are increasingly scaled in both width and depth, posing significant challenges for stable feature learning and reliable hyperparameter (HP) transfer across model sizes. While maximal update parameterization ($μ$P) has provided a principled solution to both problems for width scaling, existing extensions to the joint width-depth scaling regime remain fragmented, architecture- and optimizer-specific, and often rely on technically involved theories. In this work, we develop a simple and unified spectral framework for $μ$P under joint width-depth scaling. Considering residual networks of varying block depths, we first introduce a spectral $μ$P condition that precisely characterizes how the norms of weights and their per-step updates should scale with width and depth, unifying previously disparate $μ$P formulations as special cases. Building on this condition, we then derive a general recipe for implementing $μ$P across a broad class of optimizers by mapping the spectral constraints to concrete HP parameterizations. This approach not only recovers existing $μ$P formulations (e.g., for SGD and AdamW) but also naturally extends to a wider range of optimizers. Finally, experiments on GPT-2 style language models demonstrate that the proposed spectral $μ$P condition preserves stable feature learning and enables robust HP transfer under width-depth scaling.
Scaling Diffusion Transformers Efficiently via $μ$P
May 21, 2025Diffusion Transformers have emerged as the foundation for vision generative models, but their scalability is limited by the high cost of hyperparameter (HP) tuning at large scales. Recently, Maximal Update Parametrization ($\mu$P) was proposed for vanilla Transformers, which enables stable HP transfer from small to large language models, and dramatically reduces tuning costs. However, it remains unclear whether $\mu$P of vanilla Transformers extends to diffusion Transformers, which differ architecturally and objectively. In this work, we generalize standard $\mu$P to diffusion Transformers and validate its effectiveness through large-scale experiments. First, we rigorously prove that $\mu$P of mainstream diffusion Transformers, including DiT, U-ViT, PixArt-$\alpha$, and MMDiT, aligns with that of the vanilla Transformer, enabling the direct application of existing $\mu$P methodologies. Leveraging this result, we systematically demonstrate that DiT-$\mu$P enjoys robust HP transferability. Notably, DiT-XL-2-$\mu$P with transferred learning rate achieves 2.9 times faster convergence than the original DiT-XL-2. Finally, we validate the effectiveness of $\mu$P on text-to-image generation by scaling PixArt-$\alpha$ from 0.04B to 0.61B and MMDiT from 0.18B to 18B. In both cases, models under $\mu$P outperform their respective baselines while requiring small tuning cost, only 5.5% of one training run for PixArt-$\alpha$ and 3% of consumption by human experts for MMDiT-18B. These results establish $\mu$P as a principled and efficient framework for scaling diffusion Transformers.
A Theory for Conditional Generative Modeling on Multiple Data Sources
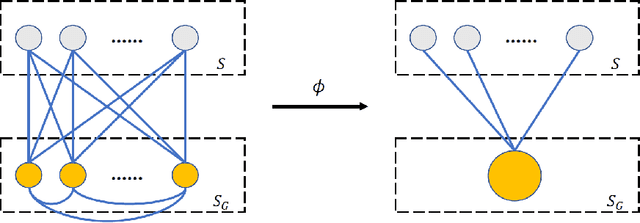
Feb 20, 2025The success of large generative models has driven a paradigm shift, leveraging massive multi-source data to enhance model capabilities. However, the interaction among these sources remains theoretically underexplored. This paper takes the first step toward a rigorous analysis of multi-source training in conditional generative modeling, where each condition represents a distinct data source. Specifically, we establish a general distribution estimation error bound in average total variation distance for conditional maximum likelihood estimation based on the bracketing number. Our result shows that when source distributions share certain similarities and the model is expressive enough, multi-source training guarantees a sharper bound than single-source training. We further instantiate the general theory on conditional Gaussian estimation and deep generative models including autoregressive and flexible energy-based models, by characterizing their bracketing numbers. The results highlight that the number of sources and similarity among source distributions improve the advantage of multi-source training. Simulations and real-world experiments validate our theory. Code is available at: \url{https://github.com/ML-GSAI/Multi-Source-GM}.
On Mesa-Optimization in Autoregressively Trained Transformers: Emergence and Capability
May 27, 2024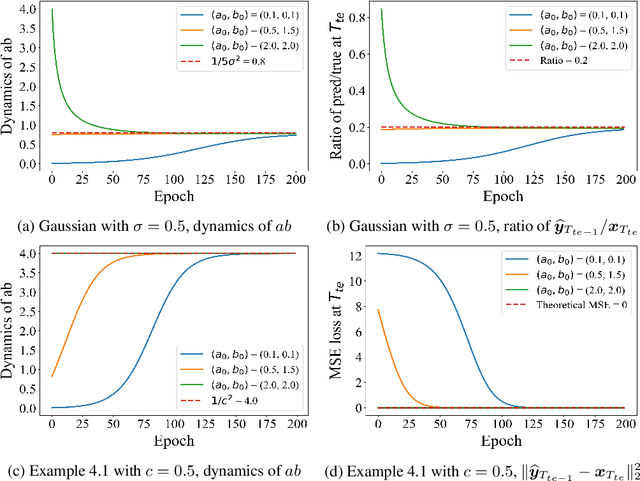
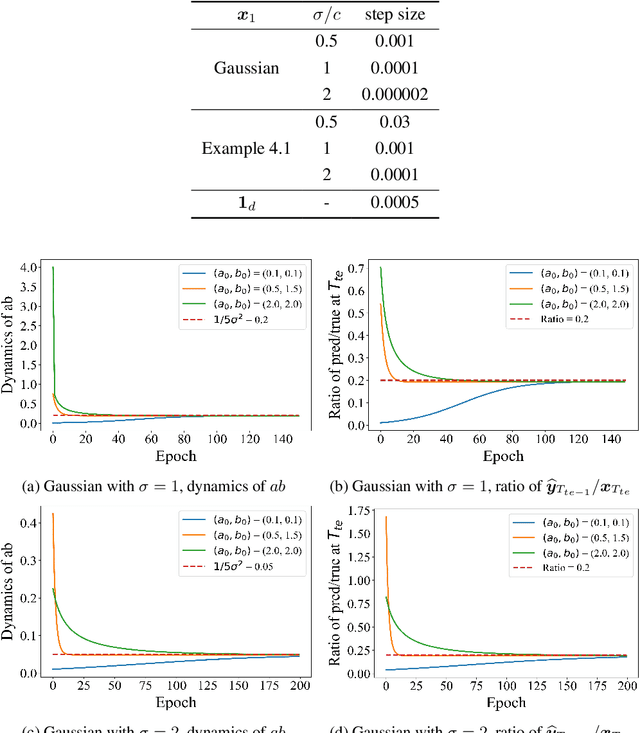
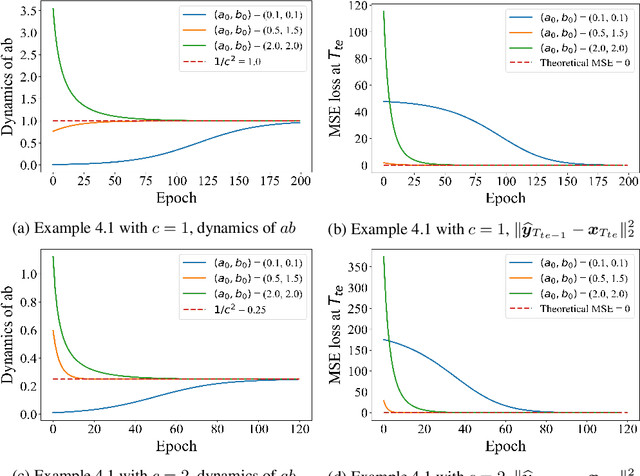
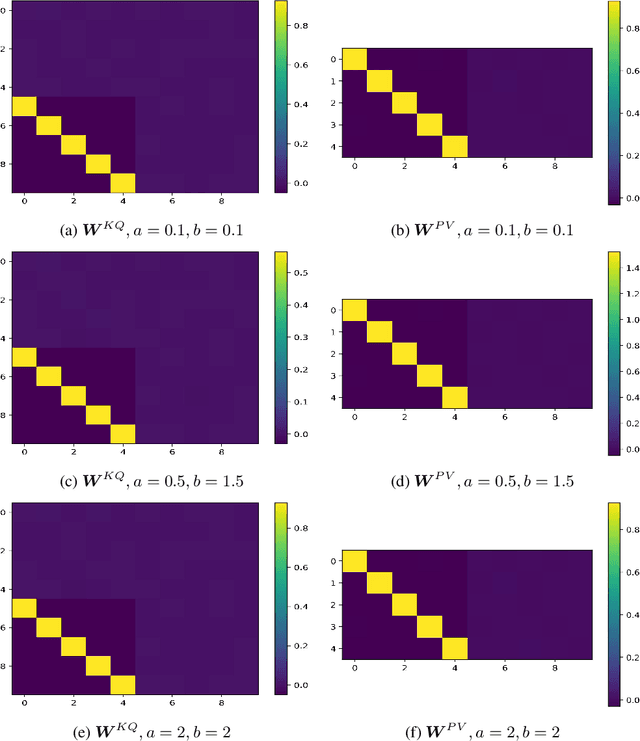
Autoregressively trained transformers have brought a profound revolution to the world, especially with their in-context learning (ICL) ability to address downstream tasks. Recently, several studies suggest that transformers learn a mesa-optimizer during autoregressive (AR) pretraining to implement ICL. Namely, the forward pass of the trained transformer is equivalent to optimizing an inner objective function in-context. However, whether the practical non-convex training dynamics will converge to the ideal mesa-optimizer is still unclear. Towards filling this gap, we investigate the non-convex dynamics of a one-layer linear causal self-attention model autoregressively trained by gradient flow, where the sequences are generated by an AR process $x_{t+1} = W x_t$. First, under a certain condition of data distribution, we prove that an autoregressively trained transformer learns $W$ by implementing one step of gradient descent to minimize an ordinary least squares (OLS) problem in-context. It then applies the learned $\widehat{W}$ for next-token prediction, thereby verifying the mesa-optimization hypothesis. Next, under the same data conditions, we explore the capability limitations of the obtained mesa-optimizer. We show that a stronger assumption related to the moments of data is the sufficient and necessary condition that the learned mesa-optimizer recovers the distribution. Besides, we conduct exploratory analyses beyond the first data condition and prove that generally, the trained transformer will not perform vanilla gradient descent for the OLS problem. Finally, our simulation results verify the theoretical results.
The Blessing of Randomness: SDE Beats ODE in General Diffusion-based Image Editing
Nov 02, 2023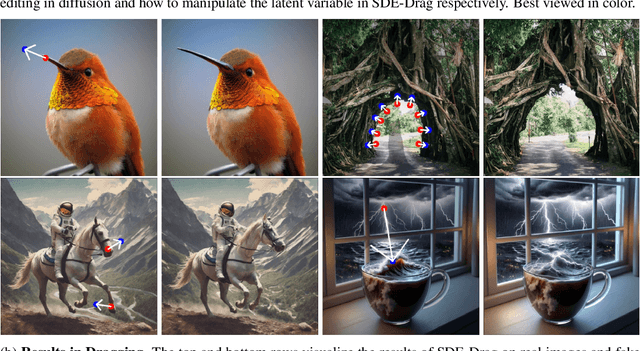
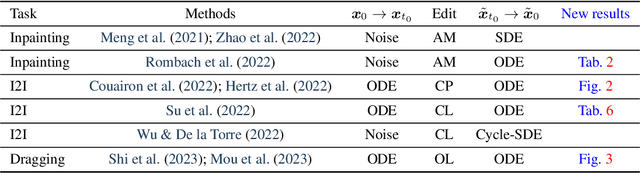

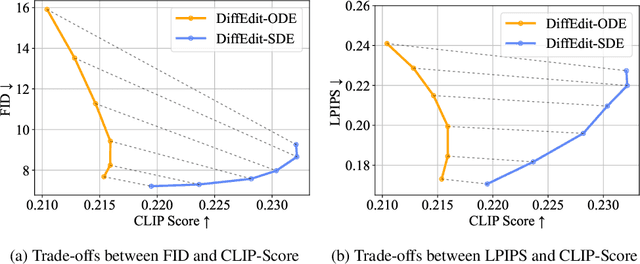
We present a unified probabilistic formulation for diffusion-based image editing, where a latent variable is edited in a task-specific manner and generally deviates from the corresponding marginal distribution induced by the original stochastic or ordinary differential equation (SDE or ODE). Instead, it defines a corresponding SDE or ODE for editing. In the formulation, we prove that the Kullback-Leibler divergence between the marginal distributions of the two SDEs gradually decreases while that for the ODEs remains as the time approaches zero, which shows the promise of SDE in image editing. Inspired by it, we provide the SDE counterparts for widely used ODE baselines in various tasks including inpainting and image-to-image translation, where SDE shows a consistent and substantial improvement. Moreover, we propose SDE-Drag -- a simple yet effective method built upon the SDE formulation for point-based content dragging. We build a challenging benchmark (termed DragBench) with open-set natural, art, and AI-generated images for evaluation. A user study on DragBench indicates that SDE-Drag significantly outperforms our ODE baseline, existing diffusion-based methods, and the renowned DragGAN. Our results demonstrate the superiority and versatility of SDE in image editing and push the boundary of diffusion-based editing methods.
Toward Understanding Generative Data Augmentation
May 27, 2023

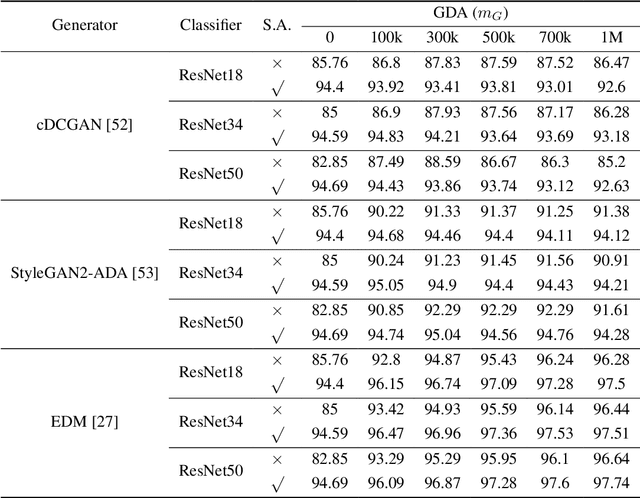
Generative data augmentation, which scales datasets by obtaining fake labeled examples from a trained conditional generative model, boosts classification performance in various learning tasks including (semi-)supervised learning, few-shot learning, and adversarially robust learning. However, little work has theoretically investigated the effect of generative data augmentation. To fill this gap, we establish a general stability bound in this not independently and identically distributed (non-i.i.d.) setting, where the learned distribution is dependent on the original train set and generally not the same as the true distribution. Our theoretical result includes the divergence between the learned distribution and the true distribution. It shows that generative data augmentation can enjoy a faster learning rate when the order of divergence term is $o(\max\left( \log(m)\beta_m, 1 / \sqrt{m})\right)$, where $m$ is the train set size and $\beta_m$ is the corresponding stability constant. We further specify the learning setup to the Gaussian mixture model and generative adversarial nets. We prove that in both cases, though generative data augmentation does not enjoy a faster learning rate, it can improve the learning guarantees at a constant level when the train set is small, which is significant when the awful overfitting occurs. Simulation results on the Gaussian mixture model and empirical results on generative adversarial nets support our theoretical conclusions. Our code is available at https://github.com/ML-GSAI/Understanding-GDA.
Revisiting Discriminative vs. Generative Classifiers: Theory and Implications
Feb 05, 2023
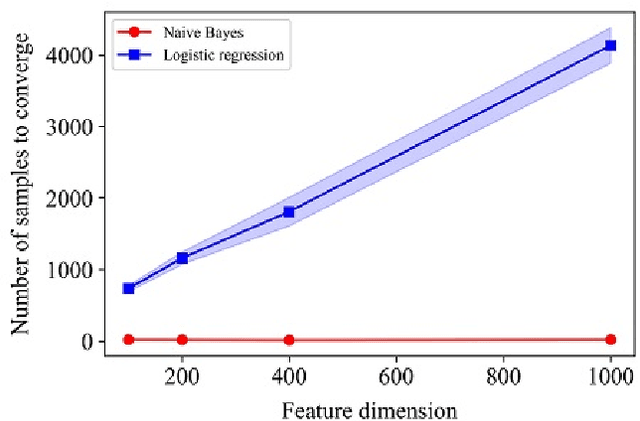
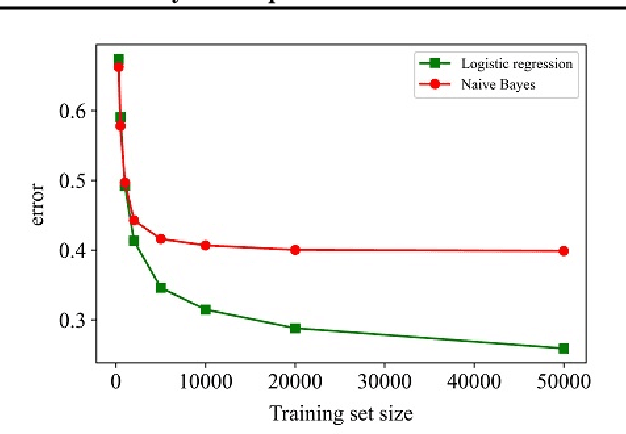

A large-scale deep model pre-trained on massive labeled or unlabeled data transfers well to downstream tasks. Linear evaluation freezes parameters in the pre-trained model and trains a linear classifier separately, which is efficient and attractive for transfer. However, little work has investigated the classifier in linear evaluation except for the default logistic regression. Inspired by the statistical efficiency of naive Bayes, the paper revisits the classical topic on discriminative vs. generative classifiers. Theoretically, the paper considers the surrogate loss instead of the zero-one loss in analyses and generalizes the classical results from binary cases to multiclass ones. We show that, under mild assumptions, multiclass naive Bayes requires $O(\log n)$ samples to approach its asymptotic error while the corresponding multiclass logistic regression requires $O(n)$ samples, where $n$ is the feature dimension. To establish it, we present a multiclass $\mathcal{H}$-consistency bound framework and an explicit bound for logistic loss, which are of independent interests. Simulation results on a mixture of Gaussian validate our theoretical findings. Experiments on various pre-trained deep vision models show that naive Bayes consistently converges faster as the number of data increases. Besides, naive Bayes shows promise in few-shot cases and we observe the ``two regimes'' phenomenon in pre-trained supervised models. Our code is available at https://github.com/ML-GSAI/Revisiting-Dis-vs-Gen-Classifiers.
AutoLC: Search Lightweight and Top-Performing Architecture for Remote Sensing Image Land-Cover Classification
May 11, 2022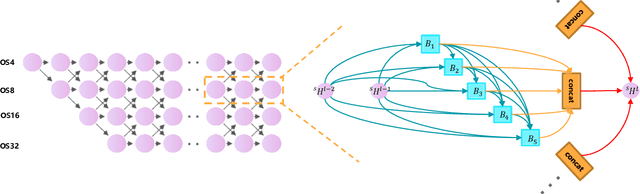
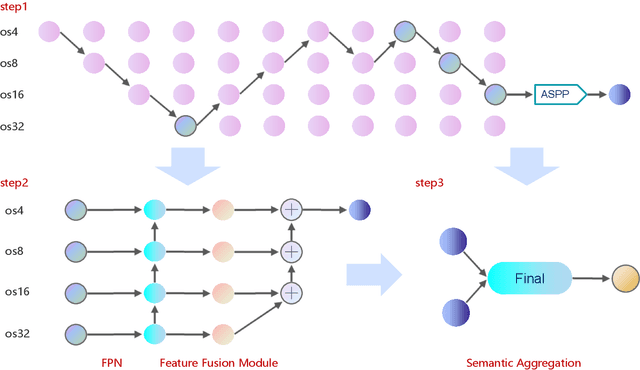
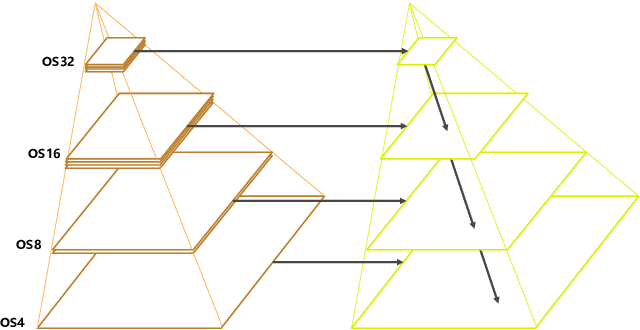
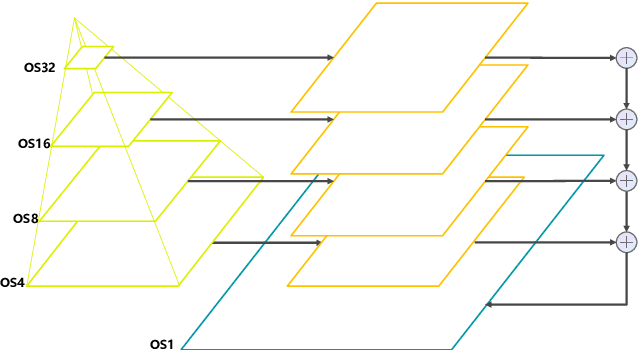
Land-cover classification has long been a hot and difficult challenge in remote sensing community. With massive High-resolution Remote Sensing (HRS) images available, manually and automatically designed Convolutional Neural Networks (CNNs) have already shown their great latent capacity on HRS land-cover classification in recent years. Especially, the former can achieve better performance while the latter is able to generate lightweight architecture. Unfortunately, they both have shortcomings. On the one hand, because manual CNNs are almost proposed for natural image processing, it becomes very redundant and inefficient to process HRS images. On the other hand, nascent Neural Architecture Search (NAS) techniques for dense prediction tasks are mainly based on encoder-decoder architecture, and just focus on the automatic design of the encoder, which makes it still difficult to recover the refined mapping when confronting complicated HRS scenes. To overcome their defects and tackle the HRS land-cover classification problems better, we propose AutoLC which combines the advantages of two methods. First, we devise a hierarchical search space and gain the lightweight encoder underlying gradient-based search strategy. Second, we meticulously design a lightweight but top-performing decoder that is adaptive to the searched encoder of itself. Finally, experimental results on the LoveDA land-cover dataset demonstrate that our AutoLC method outperforms the state-of-art manual and automatic methods with much less computational consumption.