 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopInG: Topologically Interpretable Graph Learning via Persistent Rationale Filtration
Oct 06, 2025Graph Neural Networks (GNNs) have shown remarkable success across various scientific fields, yet their adoption in critical decision-making is often hindered by a lack of interpretability. Recently, intrinsically interpretable GNNs have been studied to provide insights into model predictions by identifying rationale substructures in graphs. However, existing methods face challenges when the underlying rationale subgraphs are complex and varied. In this work, we propose TopInG: Topologically Interpretable Graph Learning, a novel topological framework that leverages persistent homology to identify persistent rationale subgraphs. TopInG employs a rationale filtration learning approach to model an autoregressive generation process of rationale subgraphs, and introduces a self-adjusted topological constraint, termed topological discrepancy, to enforce a persistent topological distinction between rationale subgraphs and irrelevant counterparts. We provide theoretical guarantees that our loss function is uniquely optimized by the ground truth under specific conditions. Extensive experiments demonstrate TopInG's effectiveness in tackling key challenges, such as handling variform rationale subgraphs, balancing predictive performance with interpretability, and mitigating spurious correlations. Results show that our approach improves upon state-of-the-art methods on both predictive accuracy and interpretation quality.
Neuc-MDS: Non-Euclidean Multidimensional Scaling Through Bilinear Forms
Nov 16, 2024We introduce Non-Euclidean-MDS (Neuc-MDS), an extension of classical Multidimensional Scaling (MDS) that accommodates non-Euclidean and non-metric inputs. The main idea is to generalize the standard inner product to symmetric bilinear forms to utilize the negative eigenvalues of dissimilarity Gram matrices. Neuc-MDS efficiently optimizes the choice of (both positive and negative) eigenvalues of the dissimilarity Gram matrix to reduce STRESS, the sum of squared pairwise error. We provide an in-depth error analysis and proofs of the optimality in minimizing lower bounds of STRESS. We demonstrate Neuc-MDS's ability to address limitations of classical MDS raised by prior research, and test it on various synthetic and real-world datasets in comparison with both linear and non-linear dimension reduction methods.
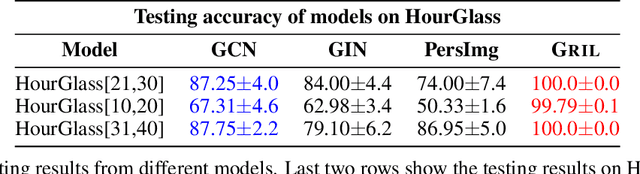
D-GRIL: End-to-End Topological Learning with 2-parameter Persistence
Jun 11, 2024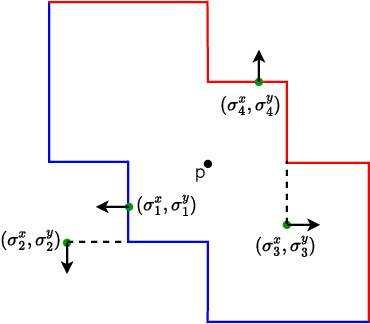
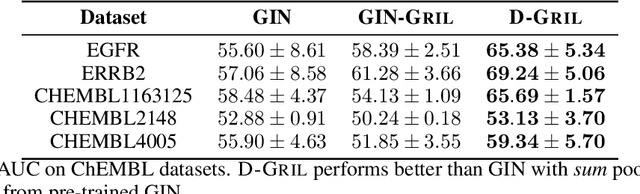
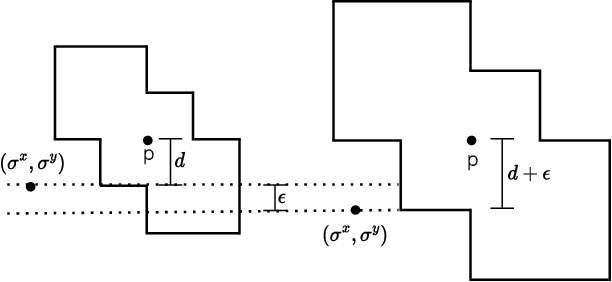
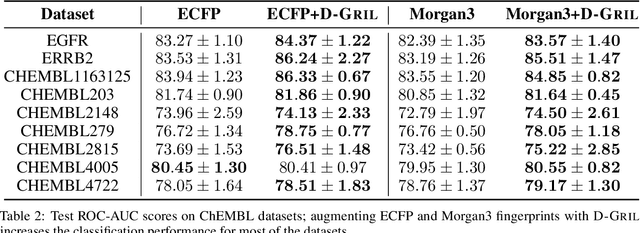
End-to-end topological learning using 1-parameter persistence is well-known. We show that the framework can be enhanced using 2-parameter persistence by adopting a recently introduced 2-parameter persistence based vectorization technique called GRIL. We establish a theoretical foundation of differentiating GRIL producing D-GRIL. We show that D-GRIL can be used to learn a bifiltration function on standard benchmark graph datasets. Further, we exhibit that this framework can be applied in the context of bio-activity prediction in drug discovery.
Optimally Improving Cooperative Learning in a Social Setting
May 31, 2024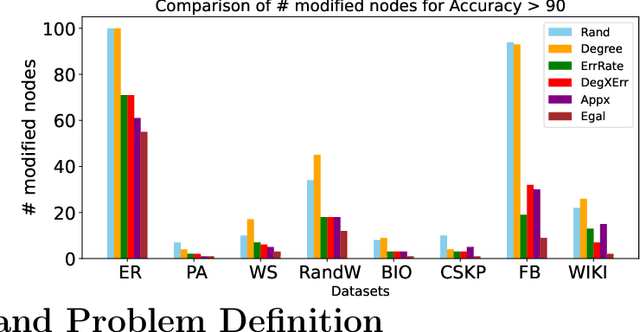
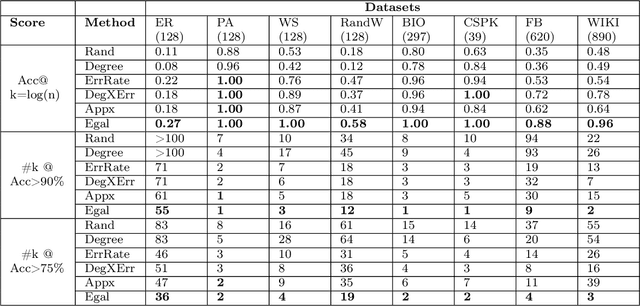
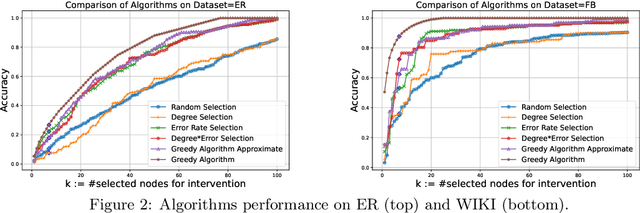
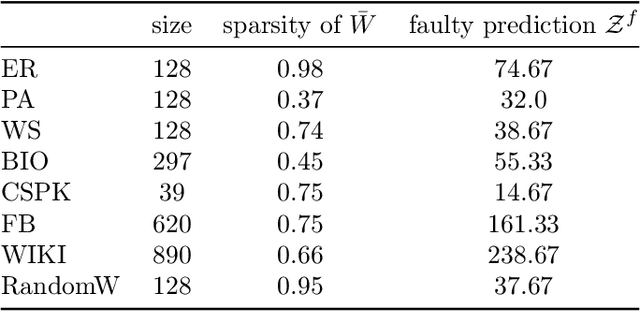
We consider a cooperative learning scenario where a collection of networked agents with individually owned classifiers dynamically update their predictions, for the same classification task, through communication or observations of each other's predictions. Clearly if highly influential vertices use erroneous classifiers, there will be a negative effect on the accuracy of all the agents in the network. We ask the following question: how can we optimally fix the prediction of a few classifiers so as maximize the overall accuracy in the entire network. To this end we consider an aggregate and an egalitarian objective function. We show a polynomial time algorithm for optimizing the aggregate objective function, and show that optimizing the egalitarian objective function is NP-hard. Furthermore, we develop approximation algorithms for the egalitarian improvement. The performance of all of our algorithms are guaranteed by mathematical analysis and backed by experiments on synthetic and real data.
Expressive Higher-Order Link Prediction through Hypergraph Symmetry Breaking
Feb 17, 2024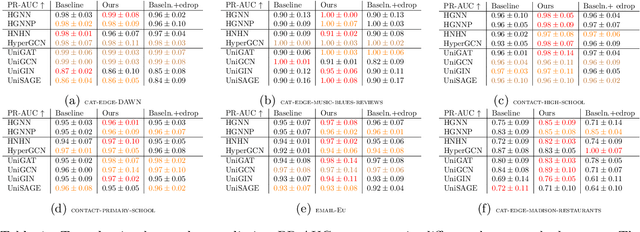
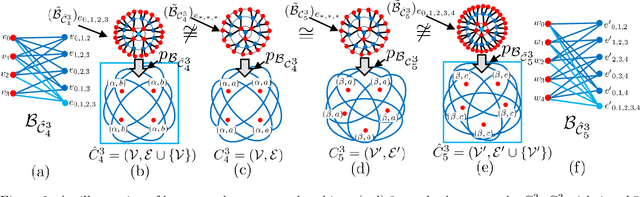
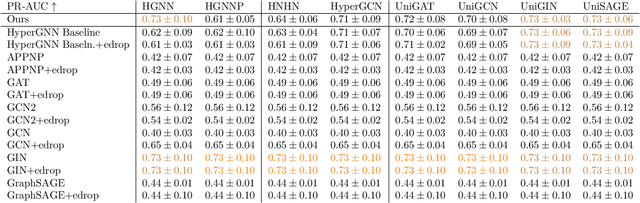
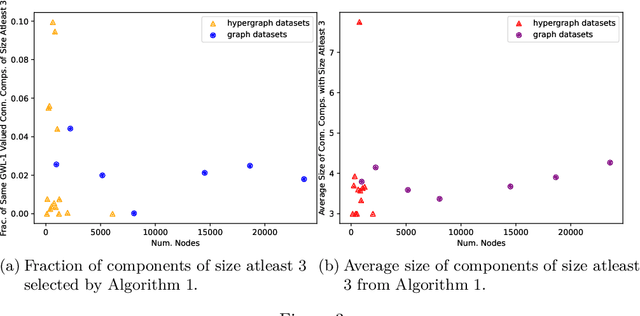
A hypergraph consists of a set of nodes along with a collection of subsets of the nodes called hyperedges. Higher-order link prediction is the task of predicting the existence of a missing hyperedge in a hypergraph. A hyperedge representation learned for higher order link prediction is fully expressive when it does not lose distinguishing power up to an isomorphism. Many existing hypergraph representation learners, are bounded in expressive power by the Generalized Weisfeiler Lehman-1 (GWL-1) algorithm, a generalization of the Weisfeiler Lehman-1 algorithm. However, GWL-1 has limited expressive power. In fact, induced subhypergraphs with identical GWL-1 valued nodes are indistinguishable. Furthermore, message passing on hypergraphs can already be computationally expensive, especially on GPU memory. To address these limitations, we devise a preprocessing algorithm that can identify certain regular subhypergraphs exhibiting symmetry. Our preprocessing algorithm runs once with complexity the size of the input hypergraph. During training, we randomly replace subhypergraphs identified by the algorithm with covering hyperedges to break symmetry. We show that our method improves the expressivity of GWL-1. Our extensive experiments also demonstrate the effectiveness of our approach for higher-order link prediction on both graph and hypergraph datasets with negligible change in computation.
DL3DV-10K: A Large-Scale Scene Dataset for Deep Learning-based 3D Vision
Dec 29, 2023



We have witnessed significant progress in deep learning-based 3D vision, ranging from neural radiance field (NeRF) based 3D representation learning to applications in novel view synthesis (NVS). However, existing scene-level datasets for deep learning-based 3D vision, limited to either synthetic environments or a narrow selection of real-world scenes, are quite insufficient. This insufficiency not only hinders a comprehensive benchmark of existing methods but also caps what could be explored in deep learning-based 3D analysis. To address this critical gap, we present DL3DV-10K, a large-scale scene dataset, featuring 51.2 million frames from 10,510 videos captured from 65 types of point-of-interest (POI) locations, covering both bounded and unbounded scenes, with different levels of reflection, transparency, and lighting. We conducted a comprehensive benchmark of recent NVS methods on DL3DV-10K, which revealed valuable insights for future research in NVS. In addition, we have obtained encouraging results in a pilot study to learn generalizable NeRF from DL3DV-10K, which manifests the necessity of a large-scale scene-level dataset to forge a path toward a foundation model for learning 3D representation. Our DL3DV-10K dataset, benchmark results, and models will be publicly accessible at https://dl3dv-10k.github.io/DL3DV-10K/.
GRIL: A $2$-parameter Persistence Based Vectorization for Machine Learning
Apr 11, 2023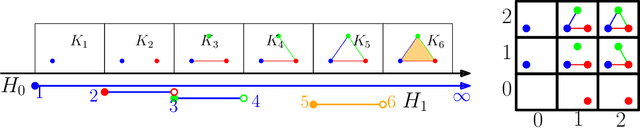
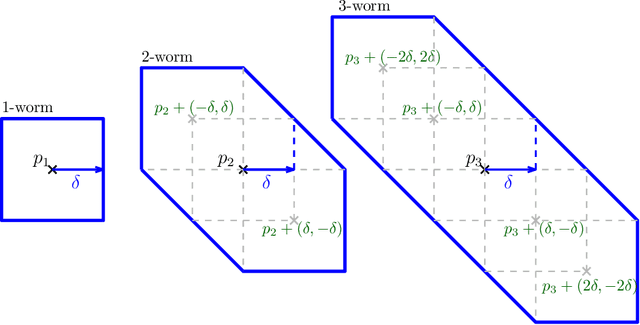
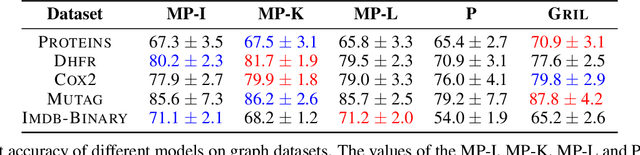
$1$-parameter persistent homology, a cornerstone in Topological Data Analysis (TDA), studies the evolution of topological features such as connected components and cycles hidden in data. It has been applied to enhance the representation power of deep learning models, such as Graph Neural Networks (GNNs). To enrich the representations of topological features, here we propose to study $2$-parameter persistence modules induced by bi-filtration functions. In order to incorporate these representations into machine learning models, we introduce a novel vector representation called Generalized Rank Invariant Landscape \textsc{Gril} for $2$-parameter persistence modules. We show that this vector representation is $1$-Lipschitz stable and differentiable with respect to underlying filtration functions and can be easily integrated into machine learning models to augment encoding topological features. We present an algorithm to compute the vector representation efficiently. We also test our methods on synthetic and benchmark graph datasets, and compare the results with previous vector representations of $1$-parameter and $2$-parameter persistence modules.