 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHGIC: A Hand Gesture Based Interactive Control System for Efficient and Scalable Multi-UAV Operations
Mar 08, 2024As technological advancements continue to expand the capabilities of multi unmanned-aerial-vehicle systems (mUAV), human operators face challenges in scalability and efficiency due to the complex cognitive load and operations associated with motion adjustments and team coordination. Such cognitive demands limit the feasible size of mUAV teams and necessitate extensive operator training, impeding broader adoption. This paper developed a Hand Gesture Based Interactive Control (HGIC), a novel interface system that utilize computer vision techniques to intuitively translate hand gestures into modular commands for robot teaming. Through learning control models, these commands enable efficient and scalable mUAV motion control and adjustments. HGIC eliminates the need for specialized hardware and offers two key benefits: 1) Minimal training requirements through natural gestures; and 2) Enhanced scalability and efficiency via adaptable commands. By reducing the cognitive burden on operators, HGIC opens the door for more effective large-scale mUAV applications in complex, dynamic, and uncertain scenarios. HGIC will be open-sourced after the paper being published online for the research community, aiming to drive forward innovations in human-mUAV interactions.
Federated Learning in Big Model Era: Domain-Specific Multimodal Large Models
Aug 24, 2023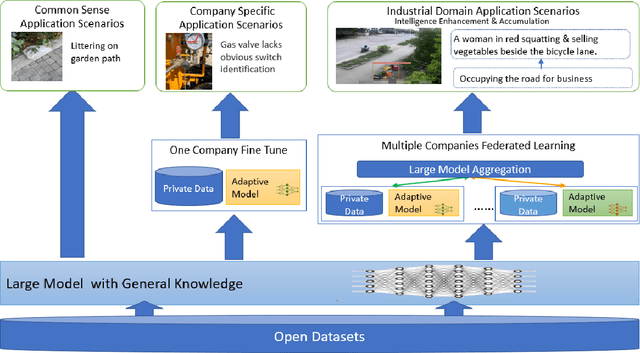
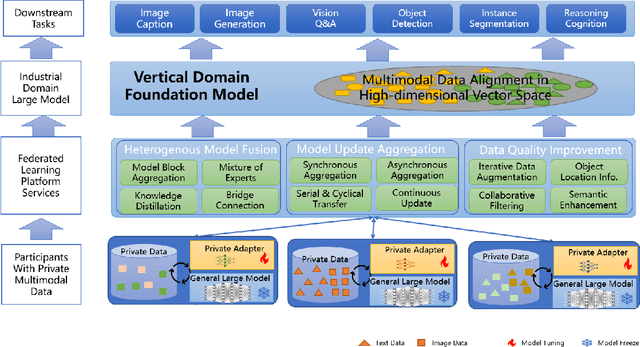
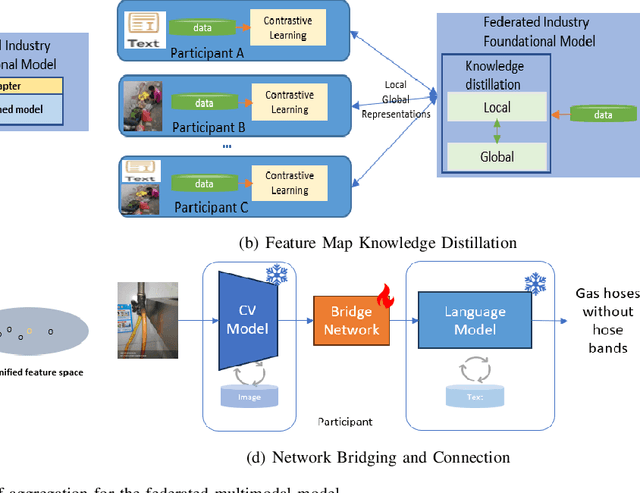
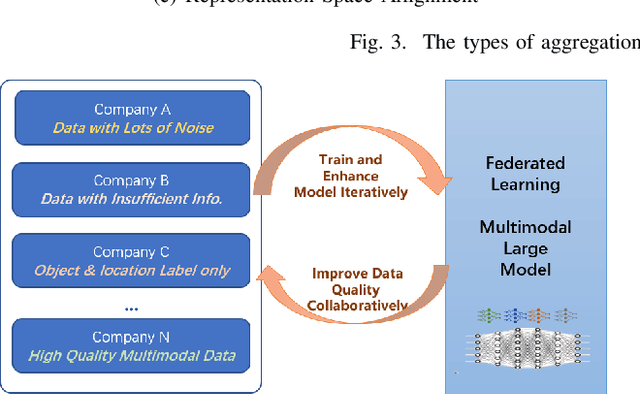
Multimodal data, which can comprehensively perceive and recognize the physical world, has become an essential path towards general artificial intelligence. However, multimodal large models trained on public datasets often underperform in specific industrial domains. This paper proposes a multimodal federated learning framework that enables multiple enterprises to utilize private domain data to collaboratively train large models for vertical domains, achieving intelligent services across scenarios. The authors discuss in-depth the strategic transformation of federated learning in terms of intelligence foundation and objectives in the era of big model, as well as the new challenges faced in heterogeneous data, model aggregation, performance and cost trade-off, data privacy, and incentive mechanism. The paper elaborates a case study of leading enterprises contributing multimodal data and expert knowledge to city safety operation management , including distributed deployment and efficient coordination of the federated learning platform, technical innovations on data quality improvement based on large model capabilities and efficient joint fine-tuning approaches. Preliminary experiments show that enterprises can enhance and accumulate intelligent capabilities through multimodal model federated learning, thereby jointly creating an smart city model that provides high-quality intelligent services covering energy infrastructure safety, residential community security, and urban operation management. The established federated learning cooperation ecosystem is expected to further aggregate industry, academia, and research resources, realize large models in multiple vertical domains, and promote the large-scale industrial application of artificial intelligence and cutting-edge research on multimodal federated learning.
D4: a Chinese Dialogue Dataset for Depression-Diagnosis-Oriented Chat
May 24, 2022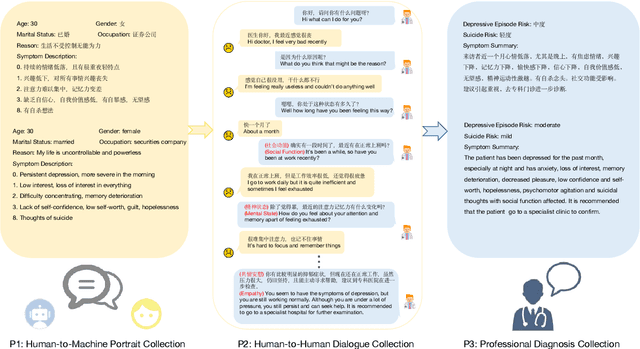
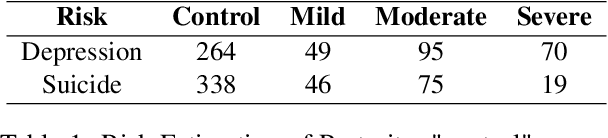
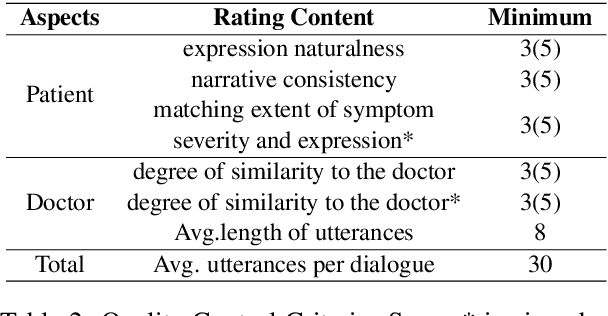
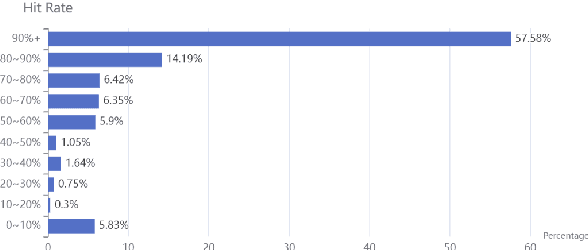
In a depression-diagnosis-directed clinical session, doctors initiate a conversation with ample emotional support that guides the patients to expose their symptoms based on clinical diagnosis criteria. Such a dialog is a combination of task-oriented and chitchat, different from traditional single-purpose human-machine dialog systems. However, due to the social stigma associated with mental illness, the dialogue data related to depression consultation and diagnosis are rarely disclosed. Though automatic dialogue-based diagnosis foresees great application potential, data sparsity has become one of the major bottlenecks restricting research on such task-oriented chat dialogues. Based on clinical depression diagnostic criteria ICD-11 and DSM-5, we construct the D$^4$: a Chinese Dialogue Dataset for Depression-Diagnosis-Oriented Chat which simulates the dialogue between doctors and patients during the diagnosis of depression, including diagnosis results and symptom summary given by professional psychiatrists for each dialogue.Finally, we finetune on state-of-the-art pre-training models and respectively present our dataset baselines on four tasks including response generation, topic prediction, dialog summary, and severity classification of depressive episode and suicide risk. Multi-scale evaluation results demonstrate that a more empathy-driven and diagnostic-accurate consultation dialogue system trained on our dataset can be achieved compared to rule-based bots.
An Internal Arc Fixation Channel and Automatic Planning Algorithm for Pelvic Fracture
Jul 25, 2021
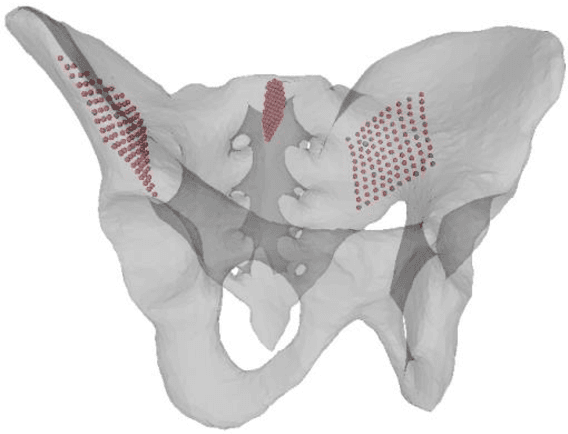

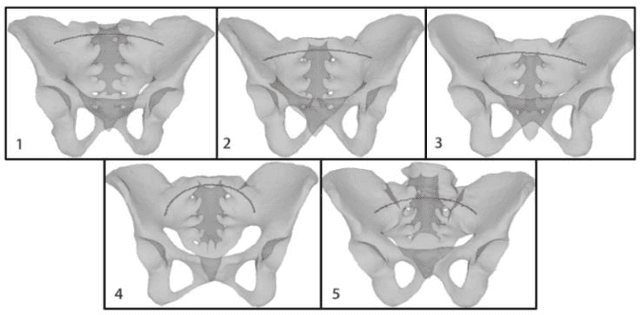
Fixating fractured pelvis fragments with the sacroiliac screw is a common treatment for unstable pelvis fracture. Due to the complex shape of the pelvis, sometimes a suitable straight screw fixation channel cannot be found using traditional methods, which increases the difficulty of pelvic fracture fixation. Therefore, there is an urgent need to find a new screw fixation method to improve the feasibility of pelvic fracture fixation. In this study, a new method of arc nail fixation is proposed to treat the pelvic fracture. An algorithm is proposed to verify the feasibility of the internal arc fixation channel (IAFC) in the pelvis, and the algorithm can calculate a relatively optimal IAFC in the pelvis. Furthermore, we compared the advantages and disadvantages of arc channel and straight channel through experiments. This study verified the feasibility of the IAFC, and the comparison of experimental results shows that the adaptability and safety of the arc channel fixation is better than the traditional straight sacroiliac screw.