 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Internal Arc Fixation Channel and Automatic Planning Algorithm for Pelvic Fracture
Jul 25, 2021
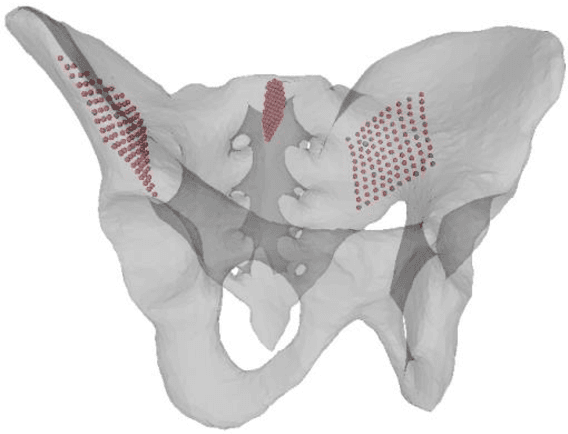

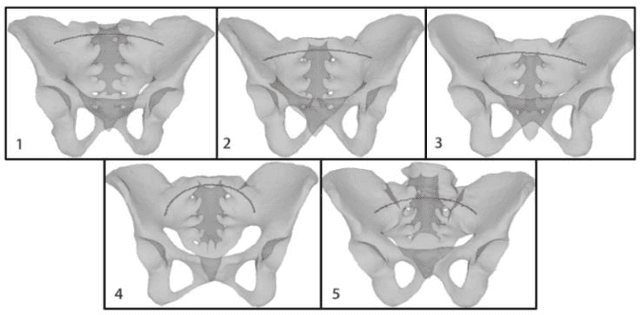
Fixating fractured pelvis fragments with the sacroiliac screw is a common treatment for unstable pelvis fracture. Due to the complex shape of the pelvis, sometimes a suitable straight screw fixation channel cannot be found using traditional methods, which increases the difficulty of pelvic fracture fixation. Therefore, there is an urgent need to find a new screw fixation method to improve the feasibility of pelvic fracture fixation. In this study, a new method of arc nail fixation is proposed to treat the pelvic fracture. An algorithm is proposed to verify the feasibility of the internal arc fixation channel (IAFC) in the pelvis, and the algorithm can calculate a relatively optimal IAFC in the pelvis. Furthermore, we compared the advantages and disadvantages of arc channel and straight channel through experiments. This study verified the feasibility of the IAFC, and the comparison of experimental results shows that the adaptability and safety of the arc channel fixation is better than the traditional straight sacroiliac screw.
Tactile Sensing with a Tendon-Driven Soft Robotic Finger
Jul 06, 2021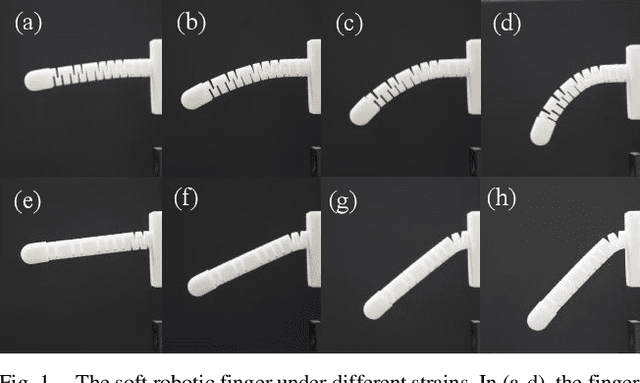
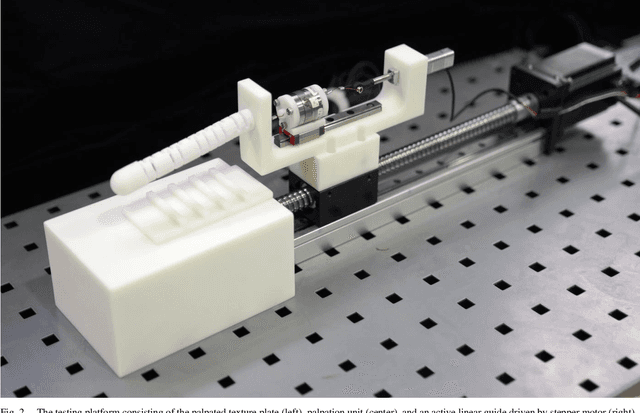
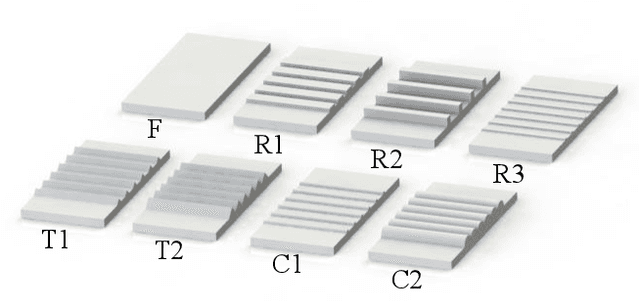
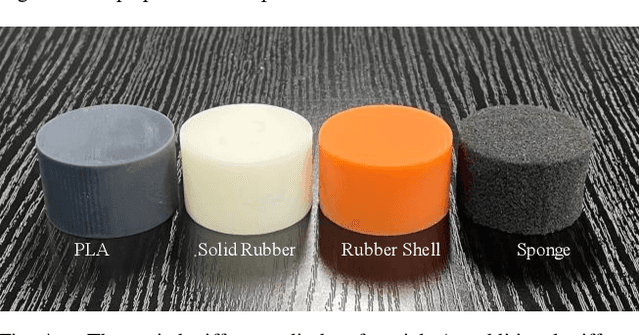
In this paper, a novel tactile sensing mechanism for soft robotic fingers is proposed. Inspired by the proprioception mechanism found in mammals, the proposed approach infers tactile information from a strain sensor attached on the finger's tendon. We perform experiments to test the tactile sensing capabilities of the proposed structures, and our results indicate this method is capable of palpating texture and stiffness in both abduction and flexion contact. Under systematic cross validation, the proposed system achieved 100% and 99.7% accuracy in texture and stiffness discrimination respectively, which validate the viability of this approach. Furthermore, we use statistics tools to determine the significance of various features extracted for classification.
Improving Grasp Planning Efficiency with Human Grasp Tendencies*
Jun 27, 2021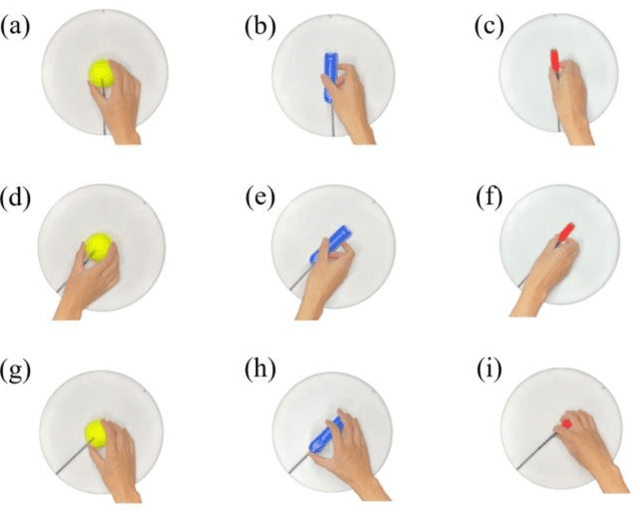
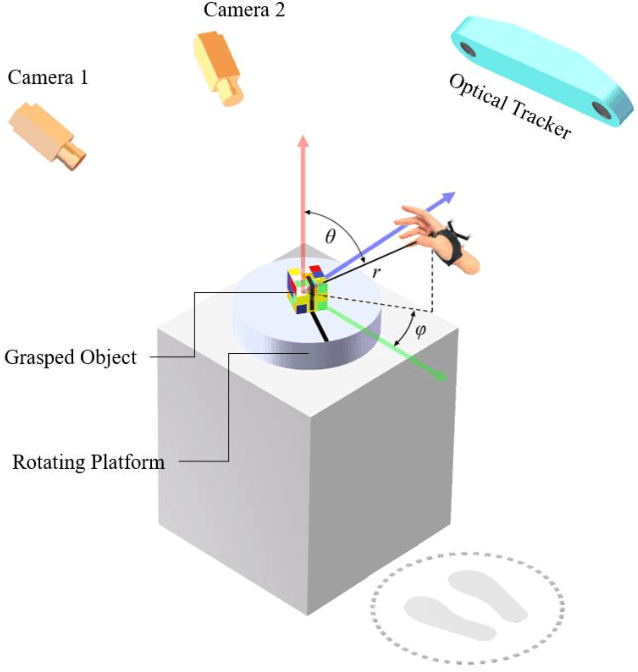
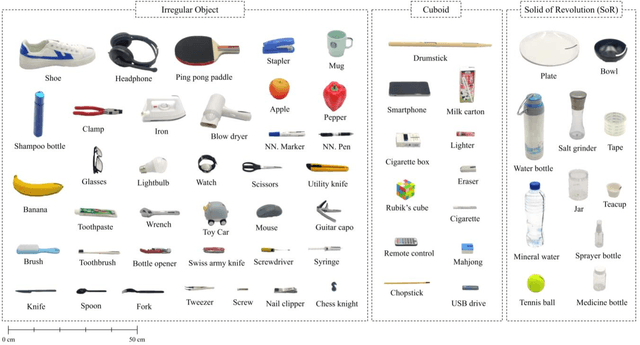
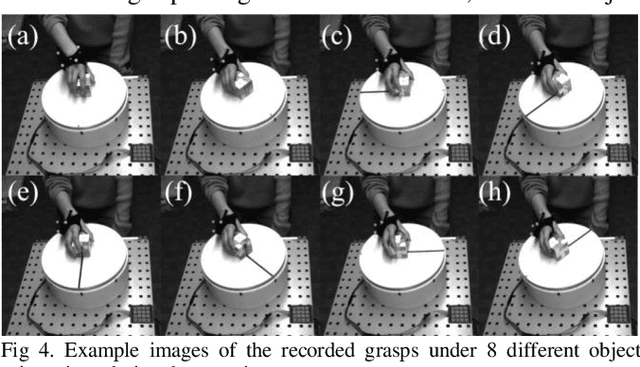
After a grasp has been planned, if the object orientation changes, the initial grasp may but not always have to be modified to accommodate the orientation change. For example, rotation of a cylinder by any amount around its centerline does not change its geometric shape relative to the grasper. Objects that can be approximated to solids of revolution or contain other geometric symmetries are prevalent in everyday life, and this information can be employed to improve the efficiency of existing grasp planning models. This paper experimentally investigates change in human-planned grasps under varied object orientations. With 13,440 recorded human grasps, our results indicate that during pick-and-place task of ordinary objects, stable grasps can be achieved with a small subset of grasp types, and the wrist-related parameters follow normal distribution. Furthermore, we show this knowledge can allow faster convergence of grasp planning algorithm.