 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservation Adaptation via Annealed Importance Resampling for Partially Observable Markov Decision Processes
Mar 25, 2025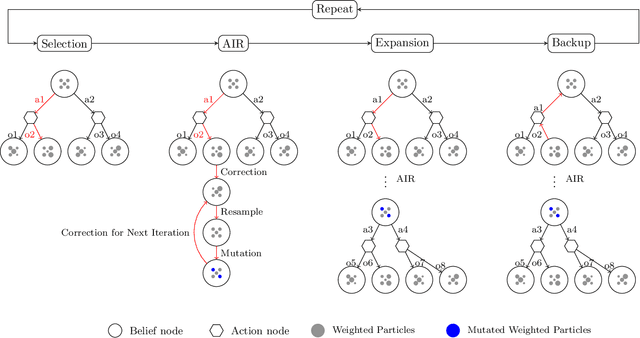
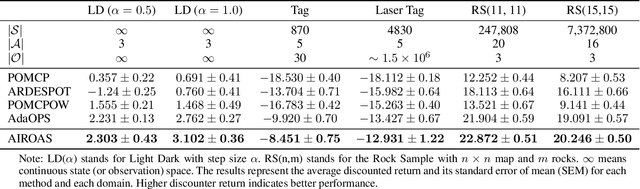
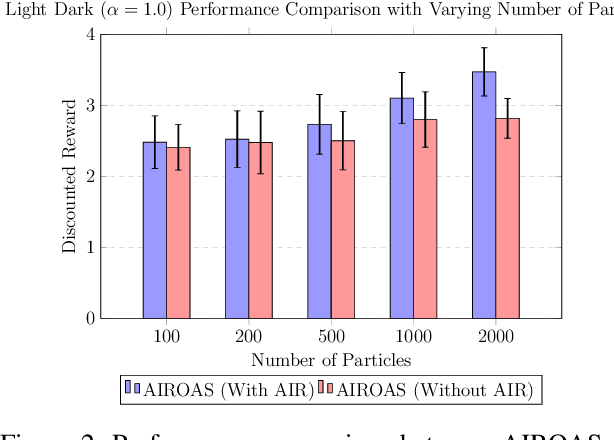
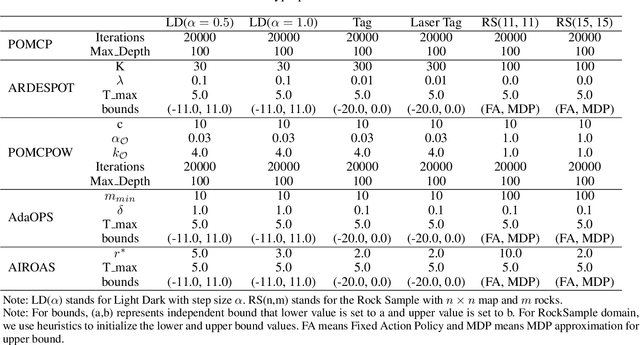
Partially observable Markov decision processes (POMDPs) are a general mathematical model for sequential decision-making in stochastic environments under state uncertainty. POMDPs are often solved \textit{online}, which enables the algorithm to adapt to new information in real time. Online solvers typically use bootstrap particle filters based on importance resampling for updating the belief distribution. Since directly sampling from the ideal state distribution given the latest observation and previous state is infeasible, particle filters approximate the posterior belief distribution by propagating states and adjusting weights through prediction and resampling steps. However, in practice, the importance resampling technique often leads to particle degeneracy and sample impoverishment when the state transition model poorly aligns with the posterior belief distribution, especially when the received observation is highly informative. We propose an approach that constructs a sequence of bridge distributions between the state-transition and optimal distributions through iterative Monte Carlo steps, better accommodating noisy observations in online POMDP solvers. Our algorithm demonstrates significantly superior performance compared to state-of-the-art methods when evaluated across multiple challenging POMDP domains.
Scalable Decision-Making in Stochastic Environments through Learned Temporal Abstraction
Feb 28, 2025Sequential decision-making in high-dimensional continuous action spaces, particularly in stochastic environments, faces significant computational challenges. We explore this challenge in the traditional offline RL setting, where an agent must learn how to make decisions based on data collected through a stochastic behavior policy. We present \textit{Latent Macro Action Planner} (L-MAP), which addresses this challenge by learning a set of temporally extended macro-actions through a state-conditional Vector Quantized Variational Autoencoder (VQ-VAE), effectively reducing action dimensionality. L-MAP employs a (separate) learned prior model that acts as a latent transition model and allows efficient sampling of plausible actions. During planning, our approach accounts for stochasticity in both the environment and the behavior policy by using Monte Carlo tree search (MCTS). In offline RL settings, including stochastic continuous control tasks, L-MAP efficiently searches over discrete latent actions to yield high expected returns. Empirical results demonstrate that L-MAP maintains low decision latency despite increased action dimensionality. Notably, across tasks ranging from continuous control with inherently stochastic dynamics to high-dimensional robotic hand manipulation, L-MAP significantly outperforms existing model-based methods and performs on-par with strong model-free actor-critic baselines, highlighting the effectiveness of the proposed approach in planning in complex and stochastic environments with high-dimensional action spaces.
NS-Gym: Open-Source Simulation Environments and Benchmarks for Non-Stationary Markov Decision Processes
Jan 16, 2025



In many real-world applications, agents must make sequential decisions in environments where conditions are subject to change due to various exogenous factors. These non-stationary environments pose significant challenges to traditional decision-making models, which typically assume stationary dynamics. Non-stationary Markov decision processes (NS-MDPs) offer a framework to model and solve decision problems under such changing conditions. However, the lack of standardized benchmarks and simulation tools has hindered systematic evaluation and advance in this field. We present NS-Gym, the first simulation toolkit designed explicitly for NS-MDPs, integrated within the popular Gymnasium framework. In NS-Gym, we segregate the evolution of the environmental parameters that characterize non-stationarity from the agent's decision-making module, allowing for modular and flexible adaptations to dynamic environments. We review prior work in this domain and present a toolkit encapsulating key problem characteristics and types in NS-MDPs. This toolkit is the first effort to develop a set of standardized interfaces and benchmark problems to enable consistent and reproducible evaluation of algorithms under non-stationary conditions. We also benchmark six algorithmic approaches from prior work on NS-MDPs using NS-Gym. Our vision is that NS-Gym will enable researchers to assess the adaptability and robustness of their decision-making algorithms to non-stationary conditions.
Shrinking POMCP: A Framework for Real-Time UAV Search and Rescue
Nov 20, 2024



Efficient path optimization for drones in search and rescue operations faces challenges, including limited visibility, time constraints, and complex information gathering in urban environments. We present a comprehensive approach to optimize UAV-based search and rescue operations in neighborhood areas, utilizing both a 3D AirSim-ROS2 simulator and a 2D simulator. The path planning problem is formulated as a partially observable Markov decision process (POMDP), and we propose a novel ``Shrinking POMCP'' approach to address time constraints. In the AirSim environment, we integrate our approach with a probabilistic world model for belief maintenance and a neurosymbolic navigator for obstacle avoidance. The 2D simulator employs surrogate ROS2 nodes with equivalent functionality. We compare trajectories generated by different approaches in the 2D simulator and evaluate performance across various belief types in the 3D AirSim-ROS simulator. Experimental results from both simulators demonstrate that our proposed shrinking POMCP solution achieves significant improvements in search times compared to alternative methods, showcasing its potential for enhancing the efficiency of UAV-assisted search and rescue operations.
Act as You Learn: Adaptive Decision-Making in Non-Stationary Markov Decision Processes
Jan 15, 2024



A fundamental (and largely open) challenge in sequential decision-making is dealing with non-stationary environments, where exogenous environmental conditions change over time. Such problems are traditionally modeled as non-stationary Markov decision processes (NSMDP). However, existing approaches for decision-making in NSMDPs have two major shortcomings: first, they assume that the updated environmental dynamics at the current time are known (although future dynamics can change); and second, planning is largely pessimistic, i.e., the agent acts ``safely'' to account for the non-stationary evolution of the environment. We argue that both these assumptions are invalid in practice -- updated environmental conditions are rarely known, and as the agent interacts with the environment, it can learn about the updated dynamics and avoid being pessimistic, at least in states whose dynamics it is confident about. We present a heuristic search algorithm called \textit{Adaptive Monte Carlo Tree Search (ADA-MCTS)} that addresses these challenges. We show that the agent can learn the updated dynamics of the environment over time and then act as it learns, i.e., if the agent is in a region of the state space about which it has updated knowledge, it can avoid being pessimistic. To quantify ``updated knowledge,'' we disintegrate the aleatoric and epistemic uncertainty in the agent's updated belief and show how the agent can use these estimates for decision-making. We compare the proposed approach with the multiple state-of-the-art approaches in decision-making across multiple well-established open-source problems and empirically show that our approach is faster and highly adaptive without sacrificing safety.
Decision Making in Non-Stationary Environments with Policy-Augmented Search
Jan 06, 2024


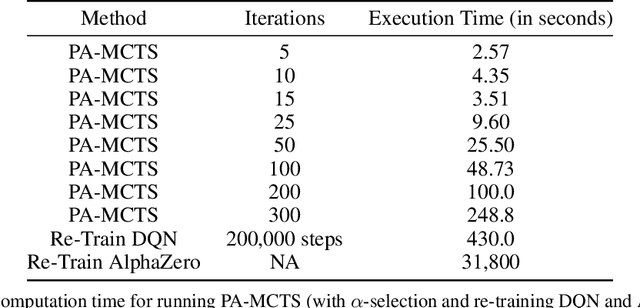
Sequential decision-making under uncertainty is present in many important problems. Two popular approaches for tackling such problems are reinforcement learning and online search (e.g., Monte Carlo tree search). While the former learns a policy by interacting with the environment (typically done before execution), the latter uses a generative model of the environment to sample promising action trajectories at decision time. Decision-making is particularly challenging in non-stationary environments, where the environment in which an agent operates can change over time. Both approaches have shortcomings in such settings -- on the one hand, policies learned before execution become stale when the environment changes and relearning takes both time and computational effort. Online search, on the other hand, can return sub-optimal actions when there are limitations on allowed runtime. In this paper, we introduce \textit{Policy-Augmented Monte Carlo tree search} (PA-MCTS), which combines action-value estimates from an out-of-date policy with an online search using an up-to-date model of the environment. We prove theoretical results showing conditions under which PA-MCTS selects the one-step optimal action and also bound the error accrued while following PA-MCTS as a policy. We compare and contrast our approach with AlphaZero, another hybrid planning approach, and Deep Q Learning on several OpenAI Gym environments. Through extensive experiments, we show that under non-stationary settings with limited time constraints, PA-MCTS outperforms these baselines.
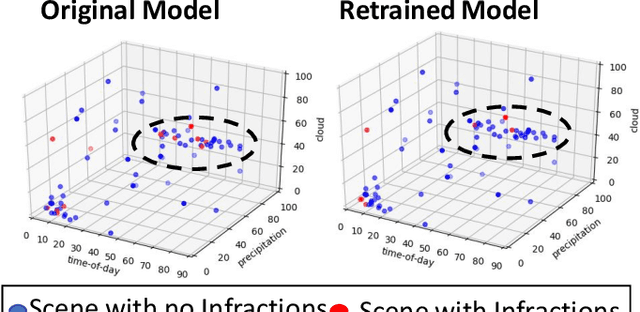
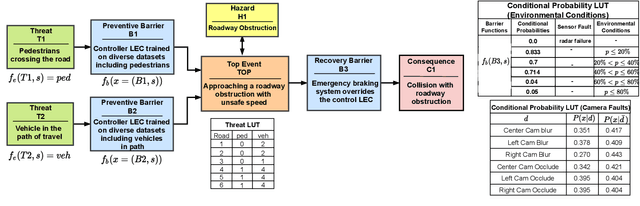
Dynamic Simplex: Balancing Safety and Performance in Autonomous Cyber Physical Systems
Feb 20, 2023



Learning Enabled Components (LEC) have greatly assisted cyber-physical systems in achieving higher levels of autonomy. However, LEC's susceptibility to dynamic and uncertain operating conditions is a critical challenge for the safety of these systems. Redundant controller architectures have been widely adopted for safety assurance in such contexts. These architectures augment LEC "performant" controllers that are difficult to verify with "safety" controllers and the decision logic to switch between them. While these architectures ensure safety, we point out two limitations. First, they are trained offline to learn a conservative policy of always selecting a controller that maintains the system's safety, which limits the system's adaptability to dynamic and non-stationary environments. Second, they do not support reverse switching from the safety controller to the performant controller, even when the threat to safety is no longer present. To address these limitations, we propose a dynamic simplex strategy with an online controller switching logic that allows two-way switching. We consider switching as a sequential decision-making problem and model it as a semi-Markov decision process. We leverage a combination of a myopic selector using surrogate models (for the forward switch) and a non-myopic planner (for the reverse switch) to balance safety and performance. We evaluate this approach using an autonomous vehicle case study in the CARLA simulator using different driving conditions, locations, and component failures. We show that the proposed approach results in fewer collisions and higher performance than state-of-the-art alternatives.
Risk-Aware Scene Sampling for Dynamic Assurance of Autonomous Systems
Feb 28, 2022
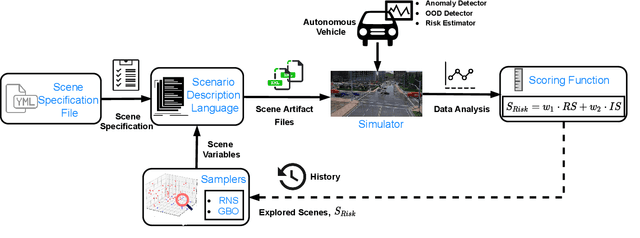
Autonomous Cyber-Physical Systems must often operate under uncertainties like sensor degradation and shifts in the operating conditions, which increases its operational risk. Dynamic Assurance of these systems requires designing runtime safety components like Out-of-Distribution detectors and risk estimators, which require labeled data from different operating modes of the system that belong to scenes with adverse operating conditions, sensors, and actuator faults. Collecting real-world data of these scenes can be expensive and sometimes not feasible. So, scenario description languages with samplers like random and grid search are available to generate synthetic data from simulators, replicating these real-world scenes. However, we point out three limitations in using these conventional samplers. First, they are passive samplers, which do not use the feedback of previous results in the sampling process. Second, the variables to be sampled may have constraints that are often not included. Third, they do not balance the tradeoff between exploration and exploitation, which we hypothesize is necessary for better search space coverage. We present a scene generation approach with two samplers called Random Neighborhood Search (RNS) and Guided Bayesian Optimization (GBO), which extend the conventional random search and Bayesian Optimization search to include the limitations. Also, to facilitate the samplers, we use a risk-based metric that evaluates how risky the scene was for the system. We demonstrate our approach using an Autonomous Vehicle example in CARLA simulation. To evaluate our samplers, we compared them against the baselines of random search, grid search, and Halton sequence search. Our samplers of RNS and GBO sampled a higher percentage of high-risk scenes of 83% and 92%, compared to 56%, 66% and 71% of the grid, random and Halton samplers, respectively.